
Fターム[3D246GB27]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 衝突防止 (795)
Fターム[3D246GB27]の下位に属するFターム
緊急時制動補助(ブレーキアシスト) (205)
予備制動、警告のための制動 (43)
余裕度、安全度、危険度に応じた制御 (297)
Fターム[3D246GB27]に分類される特許
121 - 140 / 250
危険車両判定装置および運転支援システム
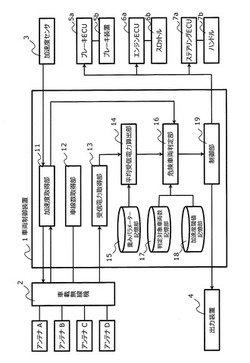
【課題】より少ない情報のみを用いて車両の状況に応じて危険を特定することのできる危険車両判定装置およびそれを用いた運転支援システムを提供する。
【解決手段】危険車両判定装置は、それぞれが異なる指向性を有する複数のアンテナと、自車両および周囲の車両の加速度を取得する加速度取得手段と、周囲の車両から送信される電波の前記複数のアンテナの各々における受信電力を取得する受信電力取得手段と、各アンテナにおける受信電力を、各アンテナにあらかじめ定められた重み付け係数を用いて平均する平均受信電力算出手段と、算出した平均受信電力が上位の所定数の車両について、自車両と当該車両との相対加速度が所定の閾値以上である場合に、当該車両を危険車両であると判断する危険判定手段と、を備える。
(もっと読む)
車両のブレーキ操作の評価装置、車両のブレーキ操作の評価方法、ブレーキ制御装置及びバッテリ制御装置

【課題】運転者が、適切なブレーキ操作を行っているか否かを判断することができ、燃費運転を訴求することが可能な車両のブレーキ操作の評価装置、車両のブレーキ操作の評価方法、ブレーキ制御装置及びバッテリ制御装置を提供する。
【解決手段】ブレーキペダルの踏込み量に基づいて要求制動力を算出するとともに、モータが出力可能な最大回生制動力、及び、バッテリが入力可能な最大回生制動力のうち、少なくとも一方の最大回生制動力を算出する。そして、要求制動力及び最大回生制動力に基づいてブレーキ操作の評価値を算出し、この評価値に応じた情報を報知する。この際、要求制動力が最大回生制動力を超えている場合、要求制動力が最大回生制動力を超えていない場合と比較して、ブレーキ操作の評価値を低く算出する。
(もっと読む)
衝突被害軽減制動制御装置
【課題】制動を実行したときの情報を保存することが可能な衝突被害軽減制動制御装置を提案する。
【解決手段】衝突被害軽減制動制御装置は、前方障害物との相対距離及び相対速度が、衝突判断基準値に到達する可能性があることを判断し(S1〜S2)、可能性があれば、相対距離及び相対速度を記憶し始める(S3)。次いで衝突判断基準値を超過するか否か判断し(S4〜S5)、衝突判断基準値を超過すると判断したときには制動を実行する(S7)。制動を実行したときには、それまでに記憶した情報を保存する(S8)。
(もっと読む)
接触防止装置及びこの接触防止装置を組み込んだ駐車支援装置
【課題】適切に作動する接触防止及びこの接触防止装置を組み込んだ駐車支援装置装置を提供する。
【解決手段】駐車支援装置部品Pは、ECU10に接続されている。ECU10には、車両7の運転者に警報を発する接触防止手段13と、駐車区画の壁Wや障害物等と車両7との間の距離を検出する距離検出手段14とが接続されている。ECU10は、車両7と物体Wとの間の距離についての変更可能な設定値である警戒距離を記憶する警戒距離記憶手段11と、警戒距離を変更する警戒距離変更手段12とを備えている。カメラ1がマークMの画像を撮影することによって、車両7を駐車区画S内において一方の壁Wにできるだけ近づけた状態で駐車させることをECU10が認識した場合には、ECU10は警戒距離変更手段12を作動させて警戒距離記憶手段11に記憶されている警戒距離の値を、より小さい値(車両7と壁Wとの間の距離よりも短い距離)に変更する。
(もっと読む)
ブレーキ制御装置
【課題】コストを抑制しつつ、滑らかなブレーキ制御を実現する。
【解決手段】制御周期が異なる複数のモジュールを備えるブレーキ制御装置において、第1モジュールは、第1制御周期で第1制御目標値を出力する。第2モジュールは、第1モジュールから出力された第1制御目標値にもとづいて第2制御目標値を第1制御周期より短い第2制御周期で演算する。目標変化値算出手段は、第1制御目標値が更新された場合、第1制御目標値にもとづいて新たな目標変化値を算出し、第1制御目標値が更新されなかった場合、前回算出された目標変化値を新たな目標変化値とする。第2制御目標値算出手段は、第1制御周期と第2制御周期との基本周期比をもとに調整された調整周期比によって新たな目標変化値を補正し、補正された目標変化値にもとづいて新たな第2制御目標値を算出する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】ドライバに与える違和感を少なくし、かつ、障害物を回避した自動運転を実現することができる
【解決手段】障害物回避ポテンシャル関数演算手段24によって、現在の目標到達点と障害物との相対位置に基づいて、障害物回避のためのポテンシャル関数を演算する。目標車両運動演算手段30によって、目標追従のためのポテンシャル関数、及び演算された障害物回避のためのポテンシャル関数の和である車両制御ポテンシャル関数に基づいて、現在の車両の進行方向と目標到達点へ向かう方向との偏角及び現在の車両の位置と目標到達点との相対位置における車両制御ポテンシャル関数の勾配を演算し、車両制御ポテンシャル関数の勾配に基づいて、目標車両運動を演算する。車両運動制御手段32によって、演算された目標車両運動を実現するように、操舵装置及び加減速装置を制御する。
(もっと読む)
衝突の場合における車両ブレーキ装置の調節方法および装置
車両ブレーキ装置の調節方法において、衝突の場合に自動的にブレーキ力が形成される。この場合、車両における衝突位置が特定され且つ前記ブレーキ力の上昇が衝突位置の関数として実行される。 (もっと読む)
走行支援装置
【課題】周辺車両との関係を考慮した制動制御を行うことができる走行支援装置を提供する。
【解決手段】走行支援装置1は、ECU2を備えている。ECU2には、自車両の制動力を制御するブレーキアクチュエータ10と、自車両に後続する後続車両から車両の停止状態の保持を要求するための停止保持要求信号を受信する受信機8とが接続されている。ECU2は、受信部8によって後続車両から送信された停止保持要求信号を受信した場合に、ブレーキアクチュエータ10に制動信号を送出し、自車両が停止状態を保持するように制動力を制御する。
(もっと読む)
障害物回避支援装置
【課題】障害物回避性能の更なる向上を図ることができる障害物回避支援装置を提供する。
【解決手段】障害物回避支援装置は、車輪の制動力を制御することによりアンダーステアを抑制するアンダーステア抑制制御部23と、車輪の制動力を制御することによりオーバーステアを抑制するオーバーステア抑制制御部22とを有する制動力制御装置1と、車両前方の障害物を検知し該障害物との接触を回避する操舵操作を支援する回避操作支援制御部42を有する電動パワーステアリング装置2と、を備える。回避操作支援制御部42が、車両前方の障害物を検知し該障害物との接触を回避する操舵操作を支援するように作動しているときには、アンダーステア抑制制御部23のゲインを通常時よりも高くし、オーバーステア抑制制御部22のゲインを通常時よりも低くする。
(もっと読む)
自動車用乗員保護装置
【課題】プリクラッシュセーフティシステムを搭載した車両に用いて好適の自動車用乗員保護装置に関し、衝突が予測される状況において乗員が受けるダメージを低減する。
【解決手段】車両に搭載され車両の衝突を推定する衝突推定手段15と、衝突推定手段15により車両の衝突が推定されると、車両衝突前に乗員に対して筋肉を刺激して筋肉を収縮させる筋肉刺激手段14とを有する
(もっと読む)
自動車両制動装置
【課題】自動制動時における制動の安定性を図ることができる自動車両制動装置を提供すること。
【解決手段】前輪6はディスクブレーキ31により制動可能に設けられ、後輪7はドラムブレーキ35により制動可能に設けられる車両1に、自動制動制御を行う際にはディスクブレーキ31に付与する油圧の調整のみで車両1の減速度の調整を行う自動制動制御部87を設ける。これにより、自動制動制御を行う場合にはドラムブレーキ35の制動力は調整しないので、制動力の制御が難しいドラムブレーキ35の制動力を調整することに起因して車両1の減速度が安定しなくなることを抑制できる。この結果、自動制動時における制動の安定性を図ることができる。
(もっと読む)
車両の運転支援装置
【課題】自車両に搭載した装備のみで他車両のルートを適切に予測し、精度の良い運転支援を行う。
【解決手段】制御ユニット5は、移動する立体物毎に、移動する立体物を基準とする座標系を設定し、移動する立体物がこの座標系で移動する際のリスクを演算し、このリスクが最小となる走行ルートを回避ルートとして推定し、回避ルートのリスクに応じて、自車両1のディスプレイ21により警報を行うと共に、自動ブレーキ制御装置22に信号を出力して自動ブレーキ制御を実行させる。
(もっと読む)
周辺監視装置
【課題】 自車両周辺の遮蔽領域から移動物体が出現する可能性を精度良く推定することができる周辺監視装置を提供する。
【解決手段】 周辺監視装置1においては、車間時間算出部7が、先行車両と自車両との相対関係である車間時間を算出し、出現可能性推定部11が、車間時間と歩行者による走行車線の横断時間とを比較して、車間時間が横断時間未満である場合には、遮蔽領域から歩行者が出現する可能性がないと推定し、車間時間が横断時間以上である場合には、遮蔽領域から歩行者が出現する可能性があると推定する。このように、遮蔽領域から歩行者が出現する可能性があるか否かの推定に車間時間を反映させることで、自車両周辺の遮蔽領域から移動物体が出現する可能性を、より現実に近い状態で精度良く推定することができる。
(もっと読む)
車両走行支援装置
【課題】走行中の障害物を回避する際に、十分な安全性を確保すると共に、適切な走行支援を行うことができる車両走行支援装置を提供する。
【解決手段】物体領域設定部17が、障害物検出部12及び二輪車判定部13により障害物として二輪車が検出された場合に、障害物の高さに基づいて物体領域Aを設定する。障害物が二輪車の場合は、転倒することによって必要とされる物体領域Aが増大する可能性があるが、障害物の高さに基づいて物体領域Aを設定することによって、転倒の可能性も考慮して安全性を確保することができる。また、障害物の高さに基づいて、転倒の可能性も考慮した必要最低限度の物体領域Aを設定することができるため、必要以上に広い物体領域Aを確保することを防止することができる。
(もっと読む)
制動制御装置
【課題】液圧制御性能を低下させることなく、比例電磁弁の駆動周波数で発生する作動音の低減を行うことが可能な制動制御装置を提供する。
【解決手段】設定された駆動周波数により駆動される比例電磁弁の開度に応じて液圧を調圧し、当該調圧した液圧に基づき制動力を制御する制動制御装置1は、要求される制動力に応じて液圧を調圧する際に要求される調圧精度に基づいて要求調圧精度指数を設定する要求調圧精度指数設定手段と、比例電磁弁を駆動する駆動周波数に起因する作動音の低減要求に基づいて要求作動音低減指数を設定する要求作動音低減指数設定手段と、設定された要求調圧精度指数及び要求作動音低減指数に基づいて比例電磁弁の駆動周波数を設定する駆動周波数設定手段14と、を備える。
(もっと読む)
制動力制御装置
【課題】
衝突の回避が不可と判断されて自動ブレーキが作動中に、路面の段差により車輪が路面から離れてしまうと輪荷重が減少して制動距離が長くなる。
【解決手段】
本制動力制御装置は、自車と障害物との相対距離及び相対速度を計測する第1のセンサと、路面の段差の上下変化状態及び自車と段差までの距離を計測する第2のセンサと、相対距離及び相対速度に基づいて、自車と障害物とが衝突するか否かを判断する衝突判断部と、上下変化状態及び段差までの距離に基づいて、自車が当該段差を通過する時のサスペンションの制御方向を判断する路面判断部と、ブレーキを制御するブレーキ制御部と、自車の車高を制御する車高制御部と、を備え、車高制御部は、ブレーキ制御部がブレーキを制御した際、車高を現在の車高よりも高く上げるよう制御し、路面に段差がある場合、当該段差の形状に基づいて当該車高の制御を変更する。
(もっと読む)
ブレーキ制御システム
【課題】停車時に余分な消費電力と発熱を低減すると共に、スムーズな発進を実現し、発進と停止の切替え時に運転者の意図に反することのないブレーキ制御装置を提供する。
【解決手段】ブレーキペダルの操作量を電気信号で検出し、該電気信号から運転者の要求制動力を算出して発生させるブレーキ制御装置において、停車状態と判定された後、実制動力に対応する電気信号が停車時に発生させる停車時制御力指令値を超えていると判断された場合、制動力の制御モードを停車時制御モードに切替えること、及び、要求制動力が、前記停車時制動力指令値より小さくなったと判断された場合、制動力の制御モードを通常制御モードに切替えること、かつ、前記停車時制御モードで、ブレーキ手段で発生する制動力を停車保持制動力とし、前記通常制御モードでは、ブレーキ手段で発生する制動力を運転者の要求制動力とする。
(もっと読む)
車両発進補助装置
【課題】 スムーズな発進を行うことができる車両発進補助装置を提供する。
【解決手段】 ドライバのブレーキペダルBPの操作無しでもホイルシリンダ液圧を保持し所定の条件が成立したときに液圧を減圧するブレーキCU32と、車両に設けられた前輪FL,FRに駆動力を作用させるエンジン39と、ブレーキCU32によりホイルシリンダ液圧を減圧する際に駆動源の駆動力または回転数が所定の上下限値の間に収まるように制御する発進補助制御部41と、を備える。
(もっと読む)
運転支援装置
【課題】本発明は、交差点のより安全な通行を支援することができる運転支援装置を提供する。
【解決手段】本発明に係る運転支援装置1は、交差点P入口の一時停止線Sの位置を検出するナビゲーションシステム3と、一時停止線Sの手前において運転者によるアクセル操作を無効化するエンジンECU8と、一時停止線Sにおける車両Aの停止後、運転者が交差点P周囲の交通状況を確認するための所定の確認動作を検出する確認動作判断部13と、確認動作判断部13による確認動作の検出後、運転者によるアクセル操作を有効化するエンジンECU8と、を備える。この運転支援装置1によれば、一時停止後アクセル操作による加速の前に運転者に確認動作を確実に行わせることができるため、交差点のより安全な通行を実現することが可能になる。
(もっと読む)
車両走行支援装置
【課題】複数の物体検知装置のそれぞれにより検知された物体の一体不可分性の有無の判定精度の向上を図ることができる装置を提供する。
【解決手段】本発明の車両走行支援装置10によれば、今回物体の測定位置pi(k)および前回物体の予測位置pi^(k)の間隔Δ1が第1基準間隔以下であるか否かに応じて当該今回物体および前回物体が同一物体であるか否かが判定される。また、第1および第2検知領域の重なり領域に一部または全部が含まれる第1および第2の今回物体の間隔Δ2が第2基準間隔以下であるか否かに応じて当該第1および第2の今回物体が一体不可分の物体であるか否かが判定される。第2基準間隔は第1基準間隔より長く設定されているため、この重なり領域A3に含まれている第1および第2の今回物体が一体不可分の物体であると判定される条件がその分だけ緩められている。
(もっと読む)
121 - 140 / 250
[ Back to top ]