
Fターム[3D246GB27]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 衝突防止 (795)
Fターム[3D246GB27]の下位に属するFターム
緊急時制動補助(ブレーキアシスト) (205)
予備制動、警告のための制動 (43)
余裕度、安全度、危険度に応じた制御 (297)
Fターム[3D246GB27]に分類される特許
161 - 180 / 250
車両の障害物検知装置
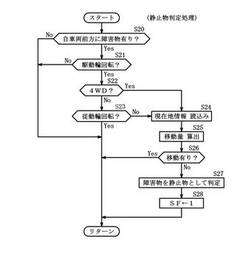
【課題】自車両の発進時に駆動輪が空転して自車両が走行できない状況を想定し、この状況下で、自車両前方の障害物が静止物であることを精度良く確実に判定できる、車両の障害物検知装置を提供する。
【解決手段】レーダユニット2により自車両Cに対して自車両前方の障害物の相対位置と相対速度とが検知され、その障害物検知情報に基づいて自車両Cの作動機器が制御されるが、更に、自車両Cの駆動輪の回転の有無と自車両Cの移動の有無が検知され、駆動輪の回転が検知された場合であって、自車両Cの移動が検知されない場合、検知された障害物の自車両に対する相対速度に変化がない障害物は静止物であると判定される。
(もっと読む)
車両の接触回避支援装置

【課題】 自車に接近してくる対向車に対する接触回避支援制御を的確に行えるようにする。
【解決手段】 対向車判定手段M2が物体検知手段M1により検知された物体および自車の相対速度から対向車を判定し、対向車進路予測手段M3が対向車進路を予測し、対向車間隔検知手段M4が複数の対向車間の車間距離あるいは車間時間を検知し、接触回避支援手段Uが前記車間距離あるいは車間時間に応じて、対向車との接触を回避し、あるいは接触した場合の被害を軽減する接触回避支援の内容を変更する。複数の対向車間の車間距離あるいは車間時間が短いと運転者は対向車に注意を集中し、逆に前記車間距離あるいは車間時間が長いと運転者は対向車に注意を集中しなくなるが、前記車間距離あるいは車間時間に応じて接触回避支援の内容を変更することで、運転者の注意力に応じた必要かつ充分な接触回避支援を行うことができる。
(もっと読む)
監視装置、電子制御装置
【課題】演算装置の動作状態を監視する監視装置において、監視必要時間を短縮すること、及び監視必要時間を短縮可能な監視装置を備えた電子制御装置の提供。
【解決手段】監視装置20では、制御マイコン11から回答信号が入力される毎に、その回答信号が交互に入力されるチェッカ30A,Bが、回答信号中の回答番号と、先に制御マイコン11に供給された対応番号の正答番号とを比較する。これと共に、比較結果を反映した宿題番号を、次番号として生成し、番号選択部23を経てシリアル通信部21に供給する。そして、シリアル通信部21が、制御マイコン11から回答信号を取得すると、番号選択部23から供給された宿題番号(次番号)を含む宿題信号制御マイコン11に出力し、その次番号に対応する演算を制御マイコン11に実行させ、さらに、回答信号を取得することで、上述したサイクルを繰り返し実行する。
(もっと読む)
車両の制動力制御装置
【課題】マニュアルブレーキ手段と自動ブレーキ手段とを具えた制動力制御装置がマニュアルブレーキ中に自動ブレーキを選択して実行する場合、運転者のマニュアルブレーキによる制動力の方が自動ブレーキによる制動力より小さくなって減速度抜けが発生することを防止し、マニュアルブレーキと自動ブレーキとの制動力差の時間変化率が大きい場合、自動ブレーキによる要求制動力の低減量を小さくして、マニュアルブレーキによる制動力よりも自動ブレーキによる制動力を大幅に高めてより素早い制動を実現する。
【解決手段】マニュアルブレーキによる制動力と自動ブレーキによる要求制動力とを比較し、該要求制動力の方が大きい場合は、自動ブレーキを選択的に作動させ、マニュアルブレーキによる制動力から自動ブレーキによる要求制動力を引いた値の単位時間当たりの変化量である制動力差時間変化率を求め、自動ブレーキによる要求制動力を低減させるとともに、求めた制動力差時間変化率が大きいほど要求制動力の低減量を小さくする。
(もっと読む)
車両の障害物検知装置
【課題】車両が障害物と衝突しそうか否かを迅速に判定し且つ障害物検知装置による作動機器の誤作動を抑えつつ、車両が走行車線から逸脱した際の安全性を向上させる。
【解決手段】障害物を検知するレーダ装置1と、レーダ装置1から情報を受けて作動機器7,9,11を制御するコントロールユニット5とを備えた障害物検知装置である。障害物が走行車線内に位置しているか否かを判定する障害物位置判定部5cと、走行車線からの車両の逸脱を予知する逸脱予知部5fと、車両と障害物との衝突を予知する衝突予知判定を行う衝突予知判定部5dとをさらに備えている。衝突予知判定部5dは、障害物位置判定部5cにより障害物が走行車線内に位置していると判定されたときには衝突予知判定を行う一方、障害物が走行車線内に位置していないと判定された場合には、逸脱予知手段5fにより走行車線からの車両の逸脱が予知されたときにのみ衝突予知判定を行う。
(もっと読む)
車線逸脱防止装置及びその方法
【課題】コンプライアンスステアによるトー角変化を抑制して、自車両の走行車線からの逸脱を防止するために必要な目標ヨーモーメントを適切に得る。
【解決手段】車線逸脱防止装置は、走行車線に対する車両の逸脱傾向を判定する車線逸脱傾向判定手段(ステップS3、ステップS4)と、車線逸脱傾向判定手段が逸脱傾向があると判定した場合に、車輪の制動力を制御して、左右輪に制動力差を発生させることで車両にヨーモーメントを付与する制動力制御手段(ステップS13、ステップS14)と、車輪に制動力を発生させる際に生じるコンプライアンスステアによるトー角変化を基に、制動力制御手段が車輪に発生させる制動力を補正するコンプライアンスステア用補正手段(ステップS10)と、を備える。
(もっと読む)
間隔制御経済速度走行制御システム
本発明は、電気制御装置(24)を含む常用制動機を持つ自動車用の間隔制御経済速度走行制御システムに関し、電気制御装置(24)が、自動車の走行データ及び先行車両に対する間隔データを検出し、走行データ及び間隔データから運動予報を作成し、駆動手段又は制動手段に影響を及ぼすことによって自動車の運動状態に影響を及ぼし、所定の限界減速度(agrenz)を仮定して、自動車の運転者の介入なしに動作する間隔制御経済速度走行制御システムにおいて、他の自動車との衝突の衝突確率が所定の衝突確率閾値を超過することを運動予測が示す時、警戒信号を自動車(10)の運転者に与える。本発明によれば、電気制御装置(24)が、常用制動機により得られる最大制動減速度(amax)を計算可能にする制動オパラメータを検出し、最大制動減速度(amax)が所定の減速度閾値を下回る時、限界減速度(agrenz)を減少するために設けられている。 (もっと読む)
衝突予測装置
【課題】 自車両と障害物との衝突を予測する際に、自車両における障害物の衝突位置を精度よく検出することができる衝突予測装置を提供する。
【解決手段】衝突予測ECU1における衝突位置分布演算部20は、衝突位置演算部19が予測した衝突予測位置に基づいて、自車両の領域を分割して得られる分割領域における衝突予測領域としての信頼度を算出する。衝突位置分布演算部20は、しきい値マップ記憶部21に衝突予測領域としての信頼度を参照して衝突予測領域を予測する。ここで、自車両の領域を分割して得られる分割領域AX,BXのうち、第1列分割領域AXは、2つの第2列分割領域BXと重なって設定されている。また、第2列分割領域BXは、2つの第1列分割領域AXと重なって設定されている。
(もっと読む)
衝突軽減装置
【課題】衝突を軽減または回避するためにより的確なブレーキ制御を行う。
【解決手段】衝突軽減装置は、自車両が他車両と衝突すると推定された場合にブレーキ制御を行うことによって衝突を軽減または回避する。具体的には、衝突軽減装置は、他車両が衝突すると予想される自車両の位置である衝突部位を推定するとともに、自車両に対して他車両が衝突する衝突角度を推定する。次に、衝突軽減装置は、他車両が自車両を突き抜けた場合における突抜部位を衝突部位および衝突角度から推定する。ブレーキ制御の内容(例えばブレーキを開始するタイミング)は、衝突部位および突抜部位に基づいて決定される。
(もっと読む)
車両用制動制御装置
【課題】障害物検知センサの特性に応じて適切な制動制御を行う車両用制動制御装置を提供することを目的とする。
【解決手段】当該車両付近の障害物を検知するに際して、前記障害物との間の距離が所定の距離値以上の場合には前記障害物までの距離値を測定し、前記距離が前記所定の距離値以下では前記障害物が存在するか否かのみを検知する障害物検知手段と、当該車両の移動量を測定する移動量測定手段と、前記障害物検知手段により前記障害物が所定の距離値以下に存在すると検知され、且つ、前記移動量測定手段により測定された当該車両の移動量が所定の移動距離値以上になったとき、当該車両を制動停止させる制動制御手段とを有することを特徴とする。
(もっと読む)
障害物検出装置および障害物検出方法
【課題】回避しにくい障害物が存在する領域を表わす危険領域を的確に検知して優先的に障害物の検出をすること。
【解決手段】障害物検出部が、前方における所定の検出対象領域を探索することによって障害物を検出する際に、優先領域設定部が、障害物検出を優先する優先領域を検出対象領域内に設定し、検出指示部が、優先領域についての探索を優先領域以外の領域である通常領域についての探索よりも優先して行うように障害物検出部に対して指示するように障害物検出装置を構成する。
(もっと読む)
車両衝突回避システム及び装置
【課題】安価な構成で車両の多重衝突を回避又は衝撃を減少可能な車両衝突回避システム及び装置を提供する。
【解決手段】後続車両3に搭載された通信手段としての車車間通信装置10が、他車両である先行車両2から発信された衝突に関する無線信号を受信すると、自動減速装置40は、車車間通信装置10が搭載された自車両(後続車両3)の走行速度を減速させる。従って、先行車両3から衝突に関する無線信号(衝突信号)が発信された場合、後続車両3は無線信号の受信に基づいて直ちに自動的に減速するので、先行車両2に対する自車両(後続車両3)の多重衝突を確実に回避又は衝撃を減少させることができる。
(もっと読む)
ブレーキ装置
【課題】 自車が障害物に衝突する可能性があるときに、電動モータ32で作動するモータシリンダがブレーキ液圧を発生する応答性を高める。
【解決手段】 レーダー装置やテレビカメラよりなる外界センシング手段Sdで検出した外界の状況に基づいて、衝突被害軽減制御電子制御ユニットUbが制動の緊急性を判定するとともに、判定した緊急性の大小に応じてモータシリンダの電動モータ32を弱め界磁制御あるいは進角制御するので、緊急時に電動モータ32の回転速度を高めてモータシリンダに速やかにブレーキ液圧を発生させ、制動の応答性を高めることができる。
(もっと読む)
緊急退避システム、緊急退避方法
【課題】運転者の意識レベルが低下した場合に車両を路肩等に退避させる緊急退避システムにおいて、緊急状態であることを外部から認識可能な緊急退避システム等を提供すること。
【解決手段】運転者の意識レベルの低下を検出して自車両を退避させる緊急退避システム100であって、運転者の状態を検出する運転者状態検出センサ21と、運転者の状態に基づき意識レベルが所定値以下に低下したか否かを判定する意識レベル判定手段41と、意識レベルが所定以下に低下したと判定された場合、自車両の前方の所定距離内に交差点があるか否かを判定する交差点有無判定手段42と、前方の所定距離内に交差点がある場合、交差点が通行可能な否かを判定する通行可否判定手段43と、交差点が通行可能な場合、交差点内に目標停止位置を決定する目標停止位置決定手段44と、目標停止位置に自車両を停止させる制動力制御手段44、45、32と、を有することを特徴とする。
(もっと読む)
車両用警報装置
【課題】 ドライバに対して複数の警報を発することが可能な車両用警報装置に関し、同時に複数の警報が出力されるような状況において、警報の優先順位を適切に設定してドライバの混乱を未然に防止する。
【解決手段】複数の警報を報知可能な警報手段2,4と、車両前方の先行車又は障害物を捕捉し、対象物との距離又は衝突予測時間に基づいて警報手段2,4から警報を発したり、車両1の作動状態を制御する衝突防止装置30と、ドライバの状態又は車両の状態に基づいて警報手段2,4から警報を発生する装置20,11と、警報手段2,4に対して警報の優先順位を設定する優先度設定手段8とをそなえ、優先度設定手段8は、衝突防止装置30で捕捉された対象物に対して、衝突防止装置の警報や作動を実行するべき対象物として信頼できる度合いを求め、当該度合いに基づいて優先順位を設定するように構成する。
(もっと読む)
車両用ブレーキ装置
【課題】2系統のブレーキラインの独立性を確保しながら、簡易な構成で自動制動の機能を追加できるようにする。
【解決手段】ブレーキペダル7の踏み込み時にフロント及びリアのエアタンク3,5内の加圧エアを前輪側及び後輪側にそれぞれ供給する第1及び第2連通路101,102と、いずれか一方のエアタンクに連通接続された第3連通路103と、第3連通路103内を連通又は遮断する切換弁23と、第3連通路103の下流側にそれぞれ接続された第4及び第5連通路104,105と、第1連通路101及び第4連通路104から供給されるエアのうち圧力の高い方を選択して出力する第1ダブルチェックバルブ19と、第2連通路102及び第5連通路105から供給されるエアのうち圧力の高い方を選択して出力する第2ダブルチェックバルブ21とを備えて構成する。
(もっと読む)
自動ブレーキングの際の自動車エンジンの停止を防止する装置及び方法
【課題】車の安全性の改善を可能にする、特にエンジン停止を高価なセンサを使用すること無しに防止することを可能にする、自動ブレーキングの際の自動車エンジンの停止を防止する装置及び方法を提供する。
【解決手段】自動ブレーキングの際の自動車エンジンの停止を防止する装置(10)は、自動車エンジンの回転数に対応するエンジン回転数信号(14)の発生ユニット(12)と、エンジン回転数信号(14)が、自動車エンジンの最少回転数を示すエンジン停止閾値(162)よりも大きい予め定められた閾値(161)以下の値を取る時に、ブレーキングを中止し或いは緩和するためのブレーキング中止ユニット(16)を備えている。
(もっと読む)
車両の走行安全装置
【課題】自車両の交差点進入時において、移動体の将来行動を高精度に予測し、正確な衝突判断を行う。
【解決手段】交差車両の推定進路上前方に先行車両が検出されている場合に、先行車両と交差車両との相対関係に基づいて交差車両が進路変更するか否かを予測する進路変更予測手段26と、交差車両の走行する車線前方における進路変更可能なスペースの有無を判定するスペース判定手段22と、交差車両が進路変更すると予測され、かつ進路変更可能なスペースが有ると判定された場合に、交差車両の推定進路を補正する推定進路補正手段24とを備える。
(もっと読む)
車両用電動ブレーキ装置
【課題】自車両の位置や速度に応じて適切に制動力を発生させることにより、車両の安全性を効果的に向上させることが可能な車両電動ブレーキ装置を提供する。
【解決手段】モータ15を駆動源とする電動ブレーキ10の作動により車輪3〜6の回転を制動する車両用電動ブレーキ装置1において、車両が停止すべき位置(停車位置)を検知する停車位置検知手段(23,25等)と、自車速度Vを検知する車速検知手段(21)と、上記停車位置検知手段により自車両Aの周りに停車位置が検知され、かつ上記車速検知手段により自車両Aが停止状態にあることが検知された場合に、上記モータ15を駆動して電動ブレーキ10を作動させる制御ユニット17とを設ける。
(もっと読む)
車両の制動装置
【課題】簡単な構成によって、障害物の存在に起因して制動力を発生させた後にその障害物との衝突の可能性がまだある場合、制動力の発生を中断または中止してしまうことを確実に防止することができる制動装置の提供。
【解決手段】ECU5は、物体検出センサ4が検知した物体が車両1と衝突する可能性がある障害物であると判定したとき、物体検出センサ4が検出した位置情報及び相対速度に基づいて、ブレーキアクチュエータ6及びディスクブレーキによる制動力の発生を開始させる。ECU5は、ブレーキアクチュエータ6及びディスクブレーキが制動力を発生しているとき、物体検出センサ4が検出する位置情報に基づいて物体が車両1の進行方向前方の所定範囲に存在するか否かを判定し、物体が所定範囲に存在すると判定した場合、ブレーキアクチュエータ6及びディスクブレーキによる制動力の発生を継続させる。
(もっと読む)
161 - 180 / 250
[ Back to top ]