
Fターム[3D246GC01]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御時期 (1,667) | 高速走行時 (103)
Fターム[3D246GC01]に分類される特許
1 - 20 / 103
ブレーキシステム
【課題】
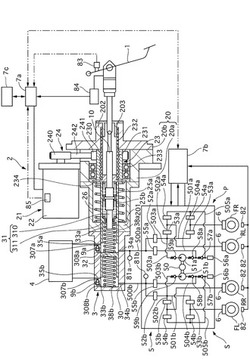
大型化を抑制しつつ、フェード時にホイールシリンダを増圧することができるブレーキシステムを提供すること。
【解決手段】
ブレーキ操作に応じてリザーバ4から遮断されて液圧室33にて液圧を発生するマスタシリンダ3と、リザーバ4から液圧室33へのブレーキ液の流れを許容する逆止弁9とを有し、フェード状態にあると判定したとき、液圧室33とホイールシリンダ6との間に設けられた液圧ユニット5が、逆止弁9を介してリザーバ4のブレーキ液を吸引し、ホイールシリンダ6へ供給することとした。
(もっと読む)
車両の運動制御装置

【課題】簡単な構成でハンドル角が小さな低横加速度旋回領域とハンドル角が大きな高横加速度旋回領域を含む全横加速度旋回領域において車両の運動状態を的確に制御して操縦安定性を高めることができる車両の運動制御装置を提供すること。
【解決手段】車速とハンドル角に基づいて目標ヨー角速度を算出し、算出された目標ヨー角速度と実際のヨー角速度との偏差が実質的に0になるよう車両の運動を制御するECU(制御手段)と、を備える車両の運動制御装置において、前記ECUは、ハンドル角が所定の閾値よりも小さい低横加速度旋回領域においてはハンドル角に比例する目標ヨー角速度を使用し、ハンドル角が前記閾値よりも大きい高横加速度旋回領域においてはハンドル角に依存しない最大横加速度で車両が定常円旋回するときのヨー角速度を目標ヨー角速度として使用して車両の運動を制御する。
(もっと読む)
車両の制御装置
【課題】リチウムイオン二次電池を搭載した電動車両において、リチウムイオン二次電池をリチウム金属析出から保護する制御を実行した上で、液圧制動と回生制動との間のブレーキ協調制御を両立する。
【解決手段】HV−ECU302は、リチウムイオン二次電池により構成されるバッテリ18におけるリチウム金属の析出を抑制するために、バッテリ18の充放電履歴に基づいてバッテリの充電電力上限値を調整する。さらに、HV−ECU302は、調整された充電電力上限値の範囲内でブレーキペダル操作に対応した要求制動力に対する、制動装置10による液圧制動力と、第2MG60による回生制動力との分担を決定するブレーキ協調制御を実行する。リチウム金属の析出を抑制するために充電電力上限値を制限する際における充電電力上限値の制限度合は、車両速度およびバッテリ18の状態に応じて可変に設定される。
(もっと読む)
自動制動装置
【課題】運転者の加速意図に応じて、迅速に自動ブレーキの解除が可能な自動制動装置1を提供する。
【解決手段】運転者のブレーキペダル操作に依存しない制動力を自動的に発生させる自動制動装置1において、運転者のアクセルペダル操作により、発生していた制動力を減衰係数に応じて減衰させ解除する制御を行う制御手段2と、アクセルペダル操作に基づいて、車両を加速させようとする運転者の加速意図の程度を検出する加速意図検出手段8とを有し、制御手段2は、加速意図の程度に応じて減衰係数を減少させることで、制動力を速く減衰させ解除する。加速意図検出手段8が、アクセルペダル19の開度と、踏込速度と、踏込加速度の中の少なくとも1つが所定値以上であると判定した場合に、制御手段2は、減衰係数を減少させる。
(もっと読む)
走行支援装置
【課題】車両の前進時と後退時とで検知対象とすべき障害物に応じた適切な検知が可能な走行支援装置を提供する。
【解決手段】車両11の前方の障害物を検知するレーダ14と後方の障害物を検知するソナー12とを備え、車両の前進時及び後退時にレーダ14及びソナー12により検知された障害物と車両11との接触を防止するように車両11の走行を制御するPCS ECU20を備えるため、前進時及び後退時の両方で障害物と車両11との接触を防止することが可能となる。また、レーダ14は、ソナー12とは異なる種類のセンサであり、ソナー12よりも車両11から長距離に位置する障害物を検知することが可能であるため、後退時の比較的に低速な速度域と、前進時の比較的に高速な速度域とに応じて、検知対象とすべき障害物と車両11との位置関係に応じた適切な検知が可能となる。
(もっと読む)
車両の操舵力制御装置
【課題】制動制御によって操向車輪に制動力が付与される際における操向車輪のセルフアライニングトルクの不足を補償し得る車両の操舵力制御装置を提供する。
【解決手段】この装置では、車両の運転者による制動操作に依存することなく車両の状態に基づく制動制御によって操向車輪に付与される制動力Bq[f*]が調整される。車両の操舵操作部材に操舵力を付与する操舵力発生手段TQが備えられる。操舵角Saaと、制動制御によって操向車輪に付与される制動力Bq[f*]とに基づいて、操舵力発生手段TQにより操舵操作部材に付与される操舵力が調整される。この操舵力は、操向車輪に付与される制動力Bq[f*]が大きいほど、また、操舵角Saaが大きいほど、より大きい値に調整される。
(もっと読む)
車両の横方向運動制御装置
【課題】 横方向運動制御中にドライバの操舵意図の有無を精度良く判断する。
【解決手段】 横方向運動制御装置は、車両のドライバの操舵意図の有無を判断する操舵意図判断部を備え、操舵意図判断部により操舵意図が有ると判断されたときに、制御対象制御部による制御対象の制御を停止する。また、操舵意図判断部は、車両のドライバによる操舵操作量を取得する操舵状態量取得部と、目標値に基づいて操舵操作量の閾値を設定する閾値設定部と、を備える。操舵意図判断部は、操舵操作量取得部により取得された操舵操作量の大きさと閾値設定部により設定された閾値とを比較することにより、操舵意図の有無を判断する。
(もっと読む)
車両運動制御装置
【課題】より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、アプリ要求や車両状態およびアベイラビリティ演算部5で演算された各制御対象のアベイラビリティを優先順位決定条件として用い、この優先順位決定条件に基づいて、制御対象の選択タイミングを判定する。すなわち、アプリ要求が出されて最初に制御対象が選択されたのち、制御対象を選択するときの優先順位を決定する条件であるアプリ要求や車両情報もしくは各制御対象のアベイラビリティが変化したときに、それに基づいて選択制御対象を再考させる。これにより、より最適な制御対象を選択して車両横方向運動制御を円滑に行うことが可能となる。
(もっと読む)
車両のブレーキ制御装置および編成列車のブレーキ制御装置
【課題】従来は回生ブレーキと空気ブレーキの協調制御において空気ブレーキの応答遅れを実回生ブレーキ力に所定の補正量を付加することで補っていたため、車両状態および気温等の外部状態に応じて毎回異なる空気ブレーキの応答遅れに対応できず、回生ブレーキと空気ブレーキの総和が必要なブレーキ力と一致しなかった。
【解決手段】車両のブレーキ制御装置に出力可能な回生ブレーキ力を推定する手段を設け、推定された回生ブレーキ力と必要ブレーキ力から空気ブレーキ力の指令値を決定し、回生ブレーキ力の指令値は必要ブレーキ力と実際に作用した空気ブレーキ力からを決定することで、ブレーキ力の総和を必要ブレーキ力に一致させることができ、さらに現車での補正量調整が不要となる。
(もっと読む)
新幹線車両用ブレーキシステム
【課題】本発明の課題は、空走距離を短くすべく、空走時間を短縮することが可能な新幹線車両用ブレーキシステムを提供することである。
【解決手段】新幹線車両用ブレーキシステムは、非常ブレーキ指令EBを受信して、該指令EBに応じた大きさの空気圧P1を発生させるブレーキ制御装置200と、予め定められた大きさの空気圧P2に調整する圧力調整弁311、及び、該指令EBのみに応じて空気圧P2を出力するか否かを選択する電磁弁312、を有する圧力発生部310と、空気圧P1とP2とが入力され、該入力された空気圧P1とP2との高い方の圧力を選択的に流通させる複式逆止弁320と、複式逆止弁320により選択された空気圧を油圧に変換する増圧シリンダ500とを備えている。そして、圧力発生部310から複式逆止弁320までの配管L2の長さが、ブレーキ制御装置200から複式逆止弁320までの配管L5及びL3の長さよりもかなり短い。
(もっと読む)
車両の運動制御装置
【課題】
車両が走行する路面状態、及び、操舵状態に応じた制動制御によって、適正に車両安定性を確保し得る車両の運動制御装置を提供する。
【解決手段】
車両の運動制御装置の制御手段CTLは、操舵操作部材SWの操舵量Saa及び操舵速度dSa、車両の旋回状態の程度を表す旋回量Tcaに基づいて、車輪の制動トルクを増加して車両安定性を向上する。制御手段CTLは、旋回量Tcaがしきい量Stcを超過し、且つ、操舵速度dSaがしきい速度Sdsを超過する場合に制動トルクを増加する。制御手段CTLは、操舵量Saaが連続して増減する過渡操舵状態を操舵量Saaに基づいて判別し、過渡操舵状態を判別する場合に、しきい量Stcを小さい値に変更する。さらに、制御手段CTLは、過渡操舵状態を判別する場合に、しきい速度Sdsを小さい値に変更する。
(もっと読む)
先行車検知装置
【課題】最適車間維持装置において、隣接車線を走行する車両を先行車両とする誤認識を減少させる。
【解決手段】ECU5は車速センサ2が検出する車速と回転角速度3が検出するヨーレートから算出する車両1の予想進路と、物体検知センサ4が検出し、前方車両判別手段が判別した前方車両との距離を算出し、判定距離設定手段が設定した先行車判定の判定距離と比較する。判定距離は物体検知センサ4が検出した前方車両と車両1との相対速度から算出し、車両1からの相対速度の増加に応じて短く設定することで車両1から高速で離間する前方車両を先行車の判定から除外する。
(もっと読む)
制動制御装置、車両、および制動制御方法
【課題】サービスブレーキと補助ブレーキとを併用しつつブレーキ操作に違和感を与えないこと。
【解決手段】ブレーキペダル2の踏み込み量に応じて減速度が変化するサービスブレーキと制動が開始されると予め決められた所定の推移で減速度を発生する補助ブレーキとによる車両の制動を制御する制動制御装置1において、運転者のブレーキペダル2の踏み込み量に相応する要求減速度に対し、サービスブレーキによる減速度と補助ブレーキによる減速度とを配分する減速度配分計算部22を有し、減速度配分計算部22は、要求減速度が補助ブレーキの減速度を超えないときは補助ブレーキによる減速度のみを要求減速度に対して配分する。
(もっと読む)
車線逸脱防止装置
【課題】ブレーキ冷間時のブレーキ制動力低下の影響を抑制して、車線逸脱防止制御として所望のヨーモーメントを自車両に付与する。
【解決手段】車線逸脱防止装置は、エンジンの始動状態(ステップS31、ステップS32)、ブレーキの作動状態(ステップS34)、ワイパーの作動状態(ステップS37)、外気温及び自車速の状態(ステップS39)に基づいて、制動力発生手段の温度を評価するブレーキエネルギ評価指標値Ecbrを算出し(ステップS41)、そのブレーキエネルギ評価指標値Ecbrに基づいて、車線逸脱防止制御の制御量としての目標ヨーモーメントを補正する(ステップS41、ステップS42)。
(もっと読む)
ブレーキ制御装置
【課題】大きな車両挙動に際し、その挙動抑制を図ることができるブレーキ制御装置を提供する。
【解決手段】車体の前部が上がるピッチ挙動が大きくなり、変形ピッチ角速度α・dθ/dtが所定値j01以下になって、挙動制御用制動信号算出回路14が出力する挙動制御用制動信号Fが目標制動力信号Kとしてアクチュエータ17に入力されると、前輪用のブレーキ手段が挙動制御用制動信号Fに応じた制動力を発生する。これにより、車体には前方方向の荷重移動が生じ、前記ピッチ挙動を抑制する。ピッチ運動の抑制を、ショックアブソーバの作動により行なうのではなく、車輪を制動することにより行なうので、仮にショックアブソーバがフルストロークし、ショックアブソーバによってはピッチ運動の抑制が困難な状況となる大きなピッチ挙動にも対応して、その大きなピッチ挙動の抑制を果たすことができる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 車両のヨーモーメントを制御する駆動力配分装置および横滑り防止装置の制御干渉を最小限に抑えながらヨーモーメントの制御効果を最大限に発揮させる。
【解決手段】 左右の後輪WRL,WRRにトルク配分可能なリヤディファレンシャルギヤDrの作動だけで目標ヨーモーメントが発生可能であるときには、リヤディファレンシャルギヤDrだけを作動させる。目標ヨーモーメントが増加してリヤディファレンシャルギヤDrの作動だけでは不足のときには、リヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御により目標ヨーモーメントを発生させる。目標ヨーモーメントが更に増加してリヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御だけでは不足のときには、リヤディファレンシャルギヤDrおよび横滑り防止装置VSAによる前輪WFL,WFRおよび後輪WRL,WRRのブレーキ制御により目標ヨーモーメントを発生させる。
(もっと読む)
衝突被害軽減装置
【課題】自車両に先行する第1障害物の衝突被害の軽減を図る。
【解決手段】レーダの各種測定結果に基づいて、第1障害物と自車両に先々行する第2障害物とを特定できたときに、第1障害物の第1速度Vo1及び第2障害物の第2速度Vo2が第1所定閾値Vt以下、第1、第2障害物間の距離Ddが第2所定閾値Dt以下、且つ、第1障害物のレーダ反射断面積Soが第3所定閾値St以下である所定状態であるか否かを判定する(S14)。そして、所定状態であれば、第1障害物と第2障害物とが接近して連なった低速走行状態又は停止状態であると判定して、衝突距離DLoをより長い距離DL1に変更すると共に、所定減速度αoをより大きい減速度α1に変更する(S17,S18)。このため、ブレーキ作動タイミングを早期化させ、より大きな減速度を発生させられるので、第1障害物の衝突被害の軽減が図られる。
(もっと読む)
衝突被害軽減装置
【課題】山岳路走行等で衝突被害軽減装置によるブレーキ作動を禁止する。
【解決手段】操舵角θが車速VSPに応じて設定された所定値θ1より大きい所定レベル以上のカーブ走行が、所定値x1以上の頻度xで行われる所定走行状態が検出されたとき、衝突被害軽減装置によるブレーキ作動を禁止するモードを設定し、その後、所定時間内に所定走行状態が再検出されれば、さらに、その時点から所定時間継続して「ブレーキ作動禁止モード」を維持し、所定時間内に所定走行状態が再検出されなければ、「ブレーキ作動禁止モード」を終了する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】閉弁特性と開弁特性とが大きく異なる場合であっても、良好な減圧を実現することができる車両用ブレーキ液圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ液圧制御装置の制御部は、調圧弁の上下流の差圧と、閉弁させるための出力電流値との関係を示す閉弁用マップMP2と、差圧と、開弁させるための出力電流値との関係を示す開弁用マップMP1とが記憶された記憶部を備え、調圧弁の開弁によって車輪ブレーキ内の液圧を減圧する場合には、開弁用マップMP1の出力電流値と閉弁用マップMP2の出力電流値を交互に選択して、調圧弁に流す電流を制御する電流値切替制御を実行する。
(もっと読む)
制駆動力制御装置
【課題】カーブ走行時における車両の走行状態を運転者の感覚に沿ったものとすることができる制駆動力制御装置を提供すること。
【解決手段】カーブ走行時の車両の制駆動力を制御する制駆動力制御装置であって、カーブの入口側において車両に前後方向の減速度が作用した状態で旋回を開始した後の減速時に、車両に作用する横加速度と前後方向の減速度とが予め設定された第一の関係となるように制駆動力を制御(S90)可能であり、第一の関係は、入口側において旋回を開始したときに車両に作用している横加速度および前後方向の減速度に基づく。制駆動力の制御を実行するか否かは、過去のカーブ走行時に運転者が運転操作をして車両に作用した横加速度と前後方向の減速度との関係である第二の関係に基づき判定される(S60)。
(もっと読む)
1 - 20 / 103
[ Back to top ]