
Fターム[3D246HA13]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 操舵状態 (1,157) | 運転者の操舵状態 (1,067) | ハンドル舵角 (864)
Fターム[3D246HA13]に分類される特許
201 - 220 / 864
ブレーキ制御装置
【課題】 減圧時における減圧弁の作動頻度を低減できるブレーキ制御装置を提供する。
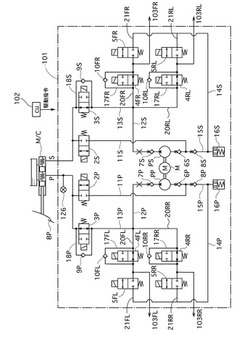
【解決手段】 ブレーキECU102は、同一配管系の2つのホイルシリンダW/Cに対する液圧指令値Pwcomにおいて、一方の液圧指令値Pwcomが他方の液圧指令値Pwcomよりも低く、低圧側のホイルシリンダW/Cの液圧指令値Pwcomが減圧指令である場合に、一方のソレノイドインバルブ4とソレノイドアウトバルブ5を共に閉じて低圧側のホイルシリンダW/Cの液圧を保持するよう液圧制御を行い、その後2つの液圧指令値Pwcomが略同一となったとき、ソレノイドインバルブ4を開弁する。
(もっと読む)
車両のヨーモーメント制御装置

【課題】 オーバーステア状態を解消すべく旋回内輪に配分する駆動力を増加させたときに、逆にオーバーステア状態が助長されるの事態を防止する。
【解決手段】 旋回方向判定手段が車両の旋回方向を判定すると(ステップS32)、旋回内輪スリップ率算出手段が旋回内輪のスリップ率Rslを算出し(ステップS33)、そのスリップ率Rslが閾値を超えると、駆動力配分量保持手段(ステップS35)が駆動力配分装置の駆動力配分量を前記スリップ率Rslが閾値Rrefを超えたときの値に保持する。これにより、旋回中に生じたオーバーステア状態を解消すべく旋回内輪に配分する駆動力を増加させても、旋回内輪に作用する荷重がタイヤの摩擦円を超えるのを未然に防止することで、旋回内輪がスリップしてグリップが失われのを回避し、オーバーステア状態が助長されないようにして車両挙動の安定化を図ることができる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 左右の駆動輪に駆動力を配分制御してヨー運動を制御する際に、ヨー運動の制御初期の応答性を確保しながら、過制御により車両が不安定になるのを防止する。
【解決手段】 駆動源からの駆動力を左右の駆動輪に配分する駆動力配分量を車両の横方向挙動の状態量に基づいて制御する際に、前記駆動力配分量を、操舵角速度算出手段32で算出した操舵角速度θ′と横加速度変化率算出手段31で算出した横加速度変化率YG′とに基づいて補正するので、操舵角θよりも立ち上がりの変化が大きい操舵角速度θ′によりヨー運動の制御初期の応答性を確保しながら、車両の実際のヨー運動の状態を表す状態量である横加速度変化率YG′を用いることで、車両の横方向の運動性能の変化をフィードバックして駆動力配分制御に反映させ、これにより駆動力配分制御が過制御に陥るのを効果的に防止することができる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 駆動力配分装置および横滑り防止装置を備えた車両において、両者の協調制御を的確に行って車両の安定性能の向上および制御応答性の向上を図る。
【解決手段】 駆動ヨーモーメントm8が最大駆動ヨーモーメントm10以下の場合には、協調制御部M11が駆動力配分装置Drに駆動ヨーモーメントm8を発生させるので、車両減速度を発生する横滑り防止装置VSAの作動を最小限に抑えて運転者の違和感を小さくすることができ、しかも駆動ヨーモーメントm8は立ち上がりが早いために、利き出しが滑らかであるだけでなく制御応答性が高められる。駆動ヨーモーメントm8が最大駆動ヨーモーメントm10を超えた場合には、協調制御部M11が駆動力配分装置Drに最大駆動ヨーモーメントm10を発生させるとともに、駆動ヨーモーメントm8に対する不足分を横滑り防止装置VSAに発生させるので、駆動力配分装置Drでは賄いきれない駆動モーメントm8を横滑り防止装置VSAで補って車両を安定化することができる。
(もっと読む)
走行制御装置および走行制御方法
【課題】車両の安全を確保しつつ、車両に走行経路上をより先に進行させることができる走行制御装置および走行制御方法を提供すること。
【解決手段】走行制御装置100は、走行経路RT1を、経路パターンPT1〜PT10に対応する走行経路ごとに区切ってセクションを設定する。そして、車両1が走行経路RT1を自律走行している場合、車両1が現在走行しているセクションのうち、車両1の現在位置からそのセクションの終端までの走行領域を、車両1がこれから通過する予定の領域(通過予定領域)KFと設定し、その通過予定領域KF内に障害物が存在しない間、車両1にセクション内を進行させる。よって、障害物が存在するセクションの手前までは車両1を進行させることができるので、車両1の安全を確保しつつ、車両1に走行経路上RT1〜RT3をより先に進行させることができる。
(もっと読む)
車両制御装置
【課題】制動回避が困難な場合において操舵回避を適切に行うことが可能な車両制御装置を提供する。
【解決手段】車両制御装置1は、ECU5を備え、このECU5により、障害物に対する制動回避制御を行うために必要な必要減速度が算出されると共に、車両10の走行状態に基づいて制動回避制御を行うために車両10が実行可能な目標となる目標減速度が算出される。そして、ECU5により、必要減速度と目標減速度との差に基づいて、障害物に対する操舵回避制御の開始タイミングΔtが算出される。よって、必要減速度が目標減速度よりも大きく、制動回避制御が困難な場合、減速度の不足に応じて操舵回避制御の開始タイミングが決定されることとなる。
(もっと読む)
走行制御装置および走行制御方法
【課題】車両を自律走行させる場合に車両の搭乗者に与える不快感を軽減できる走行制御装置および走行制御方法を提供すること。
【解決手段】車両1を自律走行させると、運転者を含む搭乗者に前触れもなく、突然切り返しが行われる場合があり、予測の困難な前後Gが車両1の搭乗者に加わることがある。本実施形態の走行制御装置100は、車両1の前進および後退を切り換える切り返し地点に車両1が到着する場合に、車両1の車両速度Vに基づいてクッションタイムを設定する。クッションタイムが設定されると、切り返し地点において車両1が所定時間停車させられるので、車両1が停車している間に、車両1の搭乗者に加わっている前後Gを緩和させることができる。よって、車両1の搭乗者に与える不快感を軽減できる。
(もっと読む)
走行制御装置
【課題】車線変更の際に、自車両の横移動を抑制しようとする不適当な制御介入を防ぐ。
【解決手段】側方車両を検出している状態で(ステップS7の判定が“No”)、自車両の後刻横位置Xfが作動閾値Xaを超えたら(ステップS19の判定が“No”)、左右輪の制動力差によって側方車両の側とは逆方向へのヨーモーメントを発生させる(ステップS21)。但し、側方物体を検出していない状態で(ステップS7の判定が“Yes”)、自車両が車線変更のために隣接車線への進入を開始していれば(ステップS11又はS14の判定が“Yes”)、作動抑制フラグをFc=1にセットすることで(ステップS12)、その後に側方物体が現れても(ステップS7の判定が“No”)、接近防止制御の作動を抑制する(ステップS17の判定が“Yes”)。
(もっと読む)
減速支援システム
【課題】車両の運転者に違和感を与えることを抑制しつつ、減速支援を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が右折又は左折する際に、車両の運転者が、右折又は左折のためにハンドルの操舵を開始する位置である操舵開始位置を学習する学習システム(109)と、運転者の右左折意思を確認する意思確認手段(109)と、車両の現在位置と、学習された操舵開始位置との間の距離を算出可能な距離算出手段(109)と、意思確認手段によって運転者の右左折意思が確認され、且つ学習システムによって操舵開始位置が学習されている場合、距離算出手段によって算出された距離に応じて減速支援を行う減速支援手段(109)とを備える。
(もっと読む)
車輪の制動力推定装置、及び、該装置を備えた車両の運動制御装置
【課題】
摩擦部材の摩擦係数に変動があっても、適正に各車輪の制動力を推定できる車輪の制動力推定装置を提供する。また、該装置によって推定された制動力に基づいて、車両の運動を安定化する車両の運動制御装置を提供する。
【解決手段】
車輪の制動力推定装置は、車両の各車輪に制動力を発生させる制動手段の摩擦部材の押付量を取得する押付量取得手段と、前記車両の前後加速度を取得する前後加速度取得手段と、前記前後加速度に基づいて前記車両に作用する減速力を演算し、該減速力及び前記押付量に基づいて前記制動力を推定する。前記推定手段は、前記車両の全ての車輪の前記押付量の総和に対する前記車両の1つの車輪の前記押付量の比率を、前記減速力に乗じることにより前記制動力を推定する。さらに、前記推定制動力に基づいて、制動制御及び操舵制御のうち少なくとも一方を実行して前記車両の運動を安定化する。
(もっと読む)
車両挙動制御装置
【課題】車両挙動制御装置において、車両の旋回制御と制動力制御との干渉を抑制可能とする。
【解決手段】左右輪の速度差により制動力制御を実行するABS制御部12aと、左右輪の制動力差により旋回制御(回転半径短縮制御)を実行する回転半径短縮制御部12bと、回転半径短縮制御部12bによる回転半径短縮制御が実行されるときにはABS制御部12aによる制動力制御を抑制する調停部12cを設ける。
(もっと読む)
運転操作補助装置
【課題】運転操作補助装置において、自車両の前方の先行車や静止障害物への距離や相対速度によりブレーキ操作量やアクセル操作量を最適に補正して運転者の操作能力を違和感なく補助することにある。
【解決手段】制御手段(2)は、先行車に続いて自車両を停止させる場合に先行車が停止してから自車両が停止するまでの標準時間を記憶し、検出した先行車との車間距離と検出した自車両の速度と先行車が停止してから自車両が停止するまでの標準時間とから先行車に続いて自車両を停止させる場合の目標ブレーキ操作量を算出し、算出された目標ブレーキ操作量と検出されたブレーキ操作量とからブレーキ補正量を算出し、この算出されたブレーキ補正量に基づいてブレーキ操作量を補正する。
(もっと読む)
車両制御システム
【課題】車両挙動制御装置がOFFの状態にされていた場合であっても、ドライバの覚醒度が低い場合には、ドライバによる障害物回避操作および車両安定化操作を支援できる車両制御システムを提供すること。
【解決手段】車両の挙動を制御する車両挙動制御装置を備えた車両制御システムSにおいて、障害物との接触を回避するとともに前記車両の挙動を安定化させるために前記車両挙動制御装置を制御する車両挙動制御手段と、ドライバの覚醒度を判定する覚醒レベル判定部32と、を備え、前記車両挙動制御手段は、前記車両挙動制御装置がOFFの状態であっても、前記覚醒レベル判定部32により判定された覚醒度が所定の覚醒度より低い場合には、前記車両挙動制御装置をONの状態に切り替えることを特徴とする。
(もっと読む)
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定し、車両旋回状態にて各車輪の不要な前後スリップの発生を抑制しつつ小回り性を向上し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の基準位置(点O)が決定され、この基準位置から車両に近い側に車両の旋回中心(点P)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωptが演算される。この目標角速度と、旋回中心からの各車輪の距離Rpw[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され且つ小回り性が向上するように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づく。
(もっと読む)
車両の速度制御装置
【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
車両運動制御装置
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて目標位置及び目標位置における速度方向に到達させるため最適な軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値を設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、目標位置の車体横方向の成分Ye、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、最短回避軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、最短距離XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、目標位置及び目標位置における速度方向に到達させるために回避距離が最短となる軌道及び車体合成力を導出する。
(もっと読む)
車両制御システム
【課題】ドライバの覚醒度が低い場合であっても、車両挙動制御装置本来の性能を十分に発揮させることができる車両制御システムを提供すること。
【解決手段】車両の挙動を制御する車両挙動制御装置を備えた車両制御システムSにおいて、障害物が接近したときに当該障害物との接触を回避するために前記車両挙動制御装置を制御する障害物回避制御手段と、前記障害物との接触を回避した後に前記車両の挙動を安定化させるために前記車両挙動制御装置を制御する車両安定化制御手段と、ドライバの覚醒度を判定する覚醒レベル判定部32と、を備え、前記障害物回避制御手段は、前記覚醒レベル判定部32により判定された覚醒度が低いときほど前記車両挙動制御装置の制御量を増大させ、前記車両安定化制御手段は、前記覚醒レベル判定部32により判定された覚醒度が低いときほど前記車両挙動制御装置の制御量を減少させる。
(もっと読む)
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定することにより、車両旋回状態において各車輪の不要な前後スリップの発生を抑制し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の旋回中心(点O)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωotが演算される。この目標角速度と、旋回中心からの各車輪の距離Row[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され得るように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づけられる。
(もっと読む)
走行支援装置
【課題】自車両が走行車線を離れる際に警報を行うことで安全走行を支援する走行支援装置において、車線変更時の安全性を向上させること。
【解決手段】後続車両が存在するか否かを判定する(S110)。後続車両が存在すると判定された場合には(S110:YES)、運転者に車線変更の意図があるか否かを判定する(S120)。具体的には、ドライバ操作判定部が、ステアリングセンサから入力された自車両のステアリングホイールの操作状態からステアリングホイール操作の有無を判定する。運転者に車線変更の意図があると判定された場合には(S120:YES)、自動ウインカをONに設定するとともに警報ACTによる報知警報をONに設定する(S130)。なお、自動ウインカがONに設定されると作動機能調停部が自動ウインカを作動させ、警報ACTによる報知警報がONに設定されると作動機能調停部が警報ACTを作動させる。
(もっと読む)
左右輪駆動装置、前後輪駆動装置及びその制御方法
【課題】各出力要素を回転自由に設定可能な差動装置、この差動装置を用いた前後輪駆動装置及び、この前後輪駆動装置の制御方法を提供すること。
【解決手段】差動装置1は、2つの出力要素間に回転差を発生させるものである。この差動装置1は、2個の遊星歯車機構20a、20bを組み合わせた遊星歯車機構組2を有してなる。遊星歯車機構組2では、キャリア21は、各遊星歯車機構20a、20b間で相互に連結されている。一方の遊星歯車機構20aのリングギア22aがブレーキ機構251により回転を停止可能なように構成されていると共に他方の遊星歯車機構20bのリングギア22bが差動モータのモータ軸に連結されている。さらに、各構成要素のうちサンギア23が、各出力要素にそれぞれ、直接的又は間接的に連結されている。
(もっと読む)
201 - 220 / 864
[ Back to top ]