
Fターム[3D246HA13]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 操舵状態 (1,157) | 運転者の操舵状態 (1,067) | ハンドル舵角 (864)
Fターム[3D246HA13]に分類される特許
141 - 160 / 864
車両制御装置
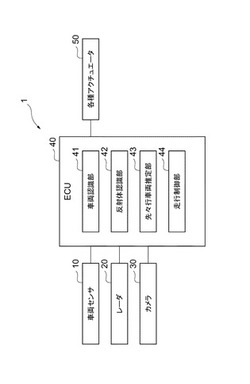
【課題】先々行車両の存在の検出精度を向上することが可能な車両制御装置を提供する。
【解決手段】本発明の一実施形態に係る車両制御装置1は、反射体を利用してレーダ20によって先々行車両を認識し、当該レーダ20によって認識された先々行車両に基づいて自車両の走行制御を行う車両制御装置において、道路以外の反射体を認識する反射体認識手段42と、レーダ20によって先々行車両が認識されない場合であっても、反射体認識手段42によって道路以外の反射体が認識されない場合には、先々行車両がいるかもしれないと推定する先々行車両推定手段43と、レーダ20によって先々行車両が認識されない場合であっても、先々行車両推定手段43によって先々行車両がいるかもしれないと推定された場合には、自車両の走行制御を行う走行制御手段44とを備える。
(もっと読む)
車両の駆動力制御装置

【課題】車両の加速時に駆動輪が回転振動するとき又はその虞れがあるときにはトランスミッションの変速比のアップシフト変更を促進することにより、車両の加速時に於ける駆動輪の回転振動を効果的に抑制する。
【解決手段】車両の加速時に(ステップ110)、駆動輪の回転振動を検出したとき(ステップ130)、若しく走行路がまたぎ路であると判定したときには(ステップ160)、駆動輪の回転振動が終息し(ステップ210)若しくはまたぎ路走行が終了するまで(ステップ220)、トランスミッション16の変速段を演算するための目標駆動力Fp_t_futureを漸減し(ステップ190、200)、トランスミッションの変速段のアップシフトを促進する。
(もっと読む)
ブレーキ制御装置
【課題】マスタシリンダと液圧ユニットを繋ぐ配管側と、液圧ユニットとホイルシリンダとを繋ぐ配管側とでは液圧剛性が異なるため、圧力変化に基づく演算に誤差が生じ、適切なベース圧が得られず、運転者に違和感を与えるという問題があった。運転者に違和感を与えることなくブレーキアシストが可能なブレーキ制御装置を提供すること。
【解決手段】ブレーキ制御装置において、ポンプの吐出流量に応じてマスタシリンダ圧を補正し、補正されたマスタシリンダ圧に基づいてホイルシリンダ圧を増減圧制御することとした。
(もっと読む)
四輪駆動車の制御装置
【課題】駆動系に付加される捩れトルクを低減して、駆動系部品の耐久性を向上する。
【解決手段】センターデフロック状態での旋回走行中に、駆動系に蓄積された捩れに伴う発生捩れトルクTh(DS捩れトルクThDS)が所定トルク(DS許容トルクTy)以上となる駆動系の捩れ状態となった場合は、前輪14にホイールブレーキ装置96によるブレーキトルクTBが加えられるので、例えば前輪14にかかるDS捩れトルクThDSの一部をホイールブレーキ装置96によるブレーキトルクTBで分担することができる為、駆動系(フロントDS34)に実質的に付加されるDS捩れトルクThDSが低減される。よって、駆動系部品の耐久性が向上される。その為、例えば駆動系部品の耐久性を確保する為に駆動系部品を大型化したりする必要が無く、駆動系部品の小型化や軽量化を図ることができる。
(もっと読む)
車両
【課題】旋回安定性を十分に高くすることができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、車体を操舵する操舵輪と、車体を駆動する駆動輪と、操舵部材と、内周面に沿って第1の係合部68が形成された固定部材58と、固定部材の径方向内方において回動自在に配設され、操舵部材の操作に伴って回動させられる回動部材59と、回動部材の外周縁に配設され、第2の係合部を備えた規制部材64,65と、操舵軸の操舵速度を検出する操舵速度検出手段と、駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有する車両であって、操舵軸の操舵速度が所定の閾値を超えた場合、第2の係合部を第1の係合部と係合させ、回動部材の回動を規制するとともに、制動を行って車速を低下させる。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、車両の軌跡が運転者の希望に則した軌跡になるよう操舵輪の舵角及び左右輪の前後力差を制御する。
【解決手段】運転者の操舵操作量に対する前輪の舵角の関係を変更する舵角可変装置14又はバイワイヤ式の操舵装置76を備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(S350、450)、その時点に於ける運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための前輪の目標舵角を演算し(S500)、一方の後輪の目標付加制動力を演算する(S1050)。そして目標舵角に基づいて前輪の舵角を制御し(S600)、目標付加制動力に基づいて後輪の制動力を制御する(S1060〜1100)。
(もっと読む)
車両の制動力制御装置
【課題】車輪ロックやABSによる減圧に伴う付加ヨーモーメントの減少を極力抑え、付加制動力を最小化して走行ロスを低減する。
【解決手段】旋回内輪に付加する総制動力FB、旋回内輪の総駆動力FDを算出し、旋回内輪に付加する総制動力FBに対する旋回内側前輪に付加する制動力の割合を制動力の前後配分比DBとして、タイヤのグリップ状態が限界に近づくに従って、制動力の前後配分比DBを静止時の接地荷重配分比に近い値から減少させて設定して、これら旋回内輪に付加する総制動力FBと旋回内輪の総駆動力FDと制動力の前後配分比DBとに応じて旋回内輪の前輪と後輪のそれぞれに付加する制動力FBf、FBrを算出する。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】運転者に違和感をより低減しつつ、回避支援をすることが可能な運転操作支援の技術を提供する。
【解決手段】障害物に対し自車両MMが緊急回避状況であると判定すると、緊急回避のための制御として操舵制御と制動制御の両方の制御を行い、自車両MMが障害物回避を完了したと判定すると、緊急回避のための制御の解除待機モードに移行し、自車両MMの車両状態が安定したと判定すると上記緊急回避のための制御を解除する。但し、上記解除待機モード中に、運転者による意図的なアクセル操作介入を検出すると、自車両MMの車両状態が安定したと判定する前であっても、制動制御のみ先に解除する。
(もっと読む)
運転支援システム
【課題】車体速度を所望の速度に維持するよう制御する車速制御が不意に解除されてしまうことを防ぐこと。
【解決手段】アクセルペダルの操作量が増加した後に、ユーザが車速制御の開始を所望すると判定するために予め設定された「車速制御開始範囲」内となった場合には開始指示をエンジンECU2へ出力する。車速制御の実行中に、アクセルペダルの操作量が、ユーザが車速制御の継続を所望すると判定するために予め設定された、車速制御開始範囲を包含する「車速制御継続範囲」内にある場合には解除指示をエンジンECU2へ出力せず、一方、アクセルペダルの操作量が車速制御継続範囲内にはなくなった場合には解除指示をエンジンECU2へ出力する。車速制御継続範囲が車速制御開始範囲を包含するので、何らかの要因でアクセルペダルの操作量が変化しても、操作量が車速制御継続範囲にある限りにおいては車速制御が解除されない。
(もっと読む)
車両制御装置及び車両制御方法
【課題】自車両周囲の障害物に対する運転者の運転支援をより適切に実施可能な車両制御技術を提供する。
【解決手段】自車両周囲の障害物との距離が予め設定した制御開始距離以下となったと判定すると、その制御開始距離以下となった障害物側への自車両の移動抑制を支援する運転支援制御を行う。この際に、運転者が自車両の運転を開始したと判定してから予め設定した抑制時間の間、上記運転支援制御を抑制する。
(もっと読む)
車両挙動制御装置及びその方法
【課題】車両挙動制御により車両挙動がオーバーシュートしてしまうのを抑制する。
【解決手段】車両挙動制御装置は、操舵角比例目標ヨーレイト算出部12が算出した運転者の操舵操作に車両挙動を追従させるための自車両の目標ヨーレイトと推定ヨーレイト算出部13が算出した自車両の推定ヨーレイトとの偏差の変化を基に、自車両にヨーモーメントを付与するための目標ヨーモーメントを算出する目標ヨーモーメント算出部16と、目標ヨーモーメント算出部16が算出した目標ヨーモーメントを基に、ヨーモーメントを付与するVDCコントローラ3及びブレーキ液圧算出部17と、を備え、偏差の変化の推移に応じて、第1目標ヨーモーメント、第1目標ヨーモーメントよりも小さい付与抑制目標ヨーモーメント、及び第1目標ヨーモーメントとはヨーモーメントの方向が反対方向となる第2目標ヨーモーメントの順序で目標ヨーモーメントを算出する。
(もっと読む)
衝突回避支援装置
【課題】 運転者の衝突回避行動に応じた適切な衝突回避支援を実現できる衝突回避支援装置を提供する。
【解決手段】 衝突回避支援装置は、自車速Vを検出する車速センサ1と、障害物のX方向(自車進行方向に対し横切る方向)への動きである障害物移動状態(移動速度Vp)を検出するレーザレーダ4、カメラ5および画像処理装置6と、自車速Vと障害物移動状態(移動速度Vp)とに基づいて、制動回避制御と操舵回避制御の重み付けを設定する重み付け設定部11aと、を備える。
(もっと読む)
車両用速度制御装置
【課題】先行車両が存在しない状況においても、ドライバにとって違和感のない速度制御を行うことができる車両用速度制御装置を提供する。
【解決手段】ブレーキペダル操作を開始し、相対速度が一定の値変化した時点で、自車両よりも初期距離だけ前を目標速度で相当する仮想先行車を設定する。そして、初期距離、目標速度から、接近離間状態評価指標の初期値を算出する。さらに、速度制御開始条件成立後の相対距離を、その条件が成立してからの経過時間と、相対速度の現在値と、初期距離とから逐次算出する。そして、これら初期距離、接近離間状態評価指標の初期値、相対距離から目標相対速度を逐次算出する。そして、目標相対速度と現在の実際の相対速度との差に基づいて速度制御を行う。よって、先行車両が存在していなくても、接近離間状態評価指標KdBを用いた、ドライバにとって違和感のない速度制御を行うことができる。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、移動する障害物を回避するための車体合成力及び回避軌道を導出する。
【解決手段】障害物を回避直後の速度方向及び車体合成力の最大値を設定し、自車両の速度のx成分vx0、y成分vy0、障害物の速度のy成分Zv、位置のy成分Z0、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を求めるために導入した第1の導入パラメータν1の特定仮定下での値ν1’との関係、第2の導入パラメータν2の特定仮定下での値ν2’との関係、障害物の回避に要する時間teの特定仮定下での時間te’との関係を定めた最短3次元マップを用いて、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を導出する。
(もっと読む)
車両走行制御装置及びその方法
【課題】アンダステア抑制制御中の車両のタックインの発生に起因する制動力制御が運転者に違和感を与えてしまうのを防止する。
【解決手段】車両走行制御装置は、アンダステア抑制制御中のアクセルペダルの操作状態を基に、車両のタックインの発生を推定するタックイン推定部16と、タックイン推定部16がタックインが発生すると推定したとき、アンダステア抑制制御による前後輪の制動力を減少させて前後輪の制動力の付与を解除する減少勾配算出部17及びブレーキ液圧算出部18と、を有し、減少勾配算出部17及びブレーキ液圧算出部18は、前後輪の制動力配分を後輪寄りに設定して前後輪の制動力を減少させる。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保し、旋回性能を改善することができる電気自動車およびプログラムを提供する。
【解決手段】この電気自動車1は、前輪側の左右輪に第1の差動装置4fを介して制駆動力を伝達する第1の電気モータ3fと、後輪側の左右輪に第2の差動装置4rを介して制駆動力を伝達する第2の電気モータ3rと、第1および第2の電気モータ3f、3rの制駆動力を制御する制御部とを備え、第1および第2の差動装置4f、4rは、制御部により左右への動力配分率が制御可能な構成を有する。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保することが容易にできる電気自動車およびプログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、車体25の少なくとも旋回加速度を検出する加速度センサ25と、各車輪2のスリップ率を演算するスリップ率演算手段と、操舵角を検出する操舵角センサ29と、旋回加速度が操舵角に応じた旋回加速度となるように各車輪のスリップ率が所定の値を超えない範囲で電気モータ3の制駆動力を制御する制駆動力制御手段とを備える。
(もっと読む)
車両制御装置
【課題】 運転者に与える違和感を抑制することができる車両制御装置を提供すること。
【解決手段】 車両に搭載され、前記車両の走行中の道路形状を認識する道路形状認識手段と、前記道路形状認識手段により走行路の前方にカーブが認識されたときに前記カーブに基づいて算出された目標速度になるようにアクチュエータを駆動し減速制御を行う速度制御手段と、前記車両の直進状態を判定する直進状態判定手段と、を設け、前記速度制御手段は、前記直進状態判定手段によって直進状態判定後に前記減速制御を行うようにした。
(もっと読む)
車両の運動制御装置
【課題】
車両が走行する路面状態、及び、操舵状態に応じた制動制御によって、適正に車両安定性を確保し得る車両の運動制御装置を提供する。
【解決手段】
車両の運動制御装置の制御手段CTLは、車両の運転者によって操作される操舵操作部材の操舵状態Saa,dSa、及び、車両の旋回運動の程度を表す旋回量Tcaのうちで少なくとも1つに基づいて、車輪の制動トルクを増加する。車両の運動制御装置の抑制手段ASLは、各車輪の速度Vwa[**]に基づいて、各車輪の前後スリップ量Slp[**]がしきいスリップ量を超過する場合に車輪の制動トルクを調整して前後スリップ量Slp[**]を抑制する。そして、抑制手段ASLは、制御手段CTLが制動トルクを増加する場合にしきいスリップ量を増加する。また、抑制手段ASLは、車両の旋回外側前方車輪のしきいスリップ量を増加し、車両の旋回内側前方車輪のしきいスリップ量を保持する。
(もっと読む)
車両の運動制御装置
【課題】
車両が走行する路面状態、及び、操舵状態に応じた制動制御によって、適正に車両安定性を確保し得る車両の運動制御装置を提供する。
【解決手段】
車両の運動制御装置の制御手段CTLは、操舵操作部材SWの操舵量Saa、及び、車両の旋回状態の程度を表す旋回量Tcaに基づいて、制動手段を介して車輪の制動トルクを増加して車両安定性を向上する制動制御を実行する。制御手段CTLは、旋回量Tcaが規範量Trfを超過する場合に制動トルクを増加する。制御手段CTLは、操舵量Saaが連続して増減する過渡操舵状態を操舵量Saaに基づいて判別し、過渡操舵状態を判別する場合には規範量Trfを小さい値に変更する。制御手段CTLは、操舵速度dSaに基づいて、操舵速度dSaが大きいほど規範量Trfを小さく設定する。
(もっと読む)
141 - 160 / 864
[ Back to top ]