
Fターム[3D246HA13]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 操舵状態 (1,157) | 運転者の操舵状態 (1,067) | ハンドル舵角 (864)
Fターム[3D246HA13]に分類される特許
121 - 140 / 864
ブレーキ制御装置
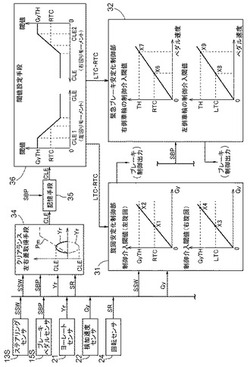
【課題】左右のブレーキ装置のブレーキドラムとブレーキシューとのクリアランスが異なる場合にもブレーキ作動時に車両を安定させるブレーキ制御装置を構成する。
【解決手段】直進状態で運転者によるブレーキ操作により停車した際のヨーレートからクリアランス左右差取得手段34が左右のブレーキ装置のクリアランスの左右差に相当するクリアランス値CLEを取得し、記憶手段35が記憶する。次に、閾値設定手段36がクリアランス値CLEからブレーキ装置の自動操作を開始する閾値を設定する。車両を旋回させる場合には旋回安定化制御部31が、旋回外側のブレーキ装置に設定された閾値まで横加速度センサ22の検出信号Gyが達したタイミングでブレーキ装置の自動作動を開始する。
(もっと読む)
車両の走行制御装置

【課題】旋回補助制御及び車両運動制御の両方について実行の要否を判定し優先順位の高い方の制御を選択する必要性や頻度を低減する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の前後力を制御することにより車両の旋回運動を安定化させる車両運動制御とを行う車両の走行制御装置。旋回補助制御の許可車速域は車両運動制御の許可車速域よりも低く設定されている。特に旋回補助制御の許可車速域の下限値は車両運動制御の許可車速域の下限値Vvscよりも低い。或いは旋回補助制御の許可車速域の上限値Vtaはオーバーステア抑制制御の許可車速域の下限値Vspよりも高いが、旋回補助制御の許可車速域の下限値はオーバーステア抑制制御の許可車速域の下限値Vspよりも低い。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映させて走行特性および人間の間隔に刺激を与える演出装置を制御する。
【解決手段】車両の走行状態に基づく指標を求め(ステップS2)、該指標に応じて前記車両の走行特性を変化させる車両の制御装置において、前記指標は、前記車両の挙動が機敏になるように前記走行特性を変化させる方向には前記走行状態の変化に応じて迅速に変化し、かつ前記車両の挙動の機敏さが低下するように前記走行特性を変化させる方向には前記走行状態の変化に対して遅れて変化する指標を含み、前記車両の運転者の五感の少なくとも一部に刺激を与える演出装置の出力内容を前記指標に基づいて変化させる(ステップS8,S9)ように構成されている。
(もっと読む)
ブレーキ制御システム
【課題】ブレーキ操作量検出装置を使用する複数の制御装置を有するブレーキ制御システムにおいて、ブレーキ操作量検出装置を1つにするブレーキ制御システムを提供する。
【解決手段】ブレーキ操作量に基づいて、マスタシリンダ圧を制御するマスタシリンダ圧制御装置と、各車輪のホイールシリンダ圧を制御するホイールシリンダ圧制御装置と、マスタシリンダ圧を算出するための信号を出力する一つのマスタシリンダ圧検出装置と、を有し、マスタシリンダ圧制御装置は、一つのマスタシリンダ圧検出装置で出力された出力結果に基づいてマスタシリンダ圧を制御し、ホイールシリンダ圧制御装置は、一つのマスタシリンダ圧検出装置で出力された出力結果に基づいてホイールシリンダ圧を制御し、一つのマスタシリンダ圧検出装置は、ホイールシリンダ圧制御装置と電気的に接続されてホイールシリンダ圧制御装置から電源電圧が供給され、マスタシリンダに設置される。
(もっと読む)
横転抑制制御装置および横転抑制制御方法
【課題】横転抑制制御に係る制動力に起因するアンダステアの発生を抑制することにより、ロール抑制をしつつ旋回トレース性を確保する横転抑制制御装置および横転抑制制御方法を提供する。
【解決手段】横転抑制制御装置は、非アンダステア状態である旨を検出した場合には、制御閾値を第1制御閾値に設定するとともに、アンダステア状態である旨を検出した場合には制御閾値を第1制御閾値より大きい第2制御閾値に設定し(ステップ108,110,114)、検出された横転状態値が設定された制御閾値より大きい場合には、車両の車輪に制動力を付与することにより車両の横転を抑制する横転抑制制御を行う(ステップ118,120)。
(もっと読む)
差動制限機構の制御装置
【課題】要求されるLSD(差動制限機構)の作動と、LSDの作動により生じる操舵反力変化に起因して発生する操舵違和感の抑制とをバランスさせることができるようにした、差動制限機構の制御装置を提供する。
【解決手段】車両の左右輪の差動を制限する差動制限機構5と、差動制限機構5を制御する制御手段10とを有する車両において、車両の操舵角を検出する操舵角検出手段8aと、車両の操舵トルクを検出する操舵トルク検出手段9と、を有し、制御手段10は、操舵角検出手段8aにより検出した操舵角の方向と、操舵トルク検出手段9により検出した操舵トルクの方向とが異なった際に、差動制限機構5の制御量を減少させる。
(もっと読む)
車両挙動制御装置
【課題】前後駆動力配分制御とブレーキ制御とを協調させて、操舵応答性とトラクション性能とを適切に両立させる。
【解決手段】エンジン駆動力Fdを算出し、該エンジン駆動力Fdに基づいて一次遅れ処理を行って前後軸間の締結トルクCawdを算出してトランスファクラッチ駆動部31に出力する。一方、エンジン駆動力Fdの時間的変化ΔFdに基づいて時間の経過と共に減衰する駆動力の変化に応じた制動力Fdtdを一次進み処理を行って算出し、駆動力の変化に応じた制動力Fdtdを基とするアクセル感応目標ヨーモーメントMdtを算出し、ハンドル角速度を基とする操舵感応目標ヨーモーメントMstを一次進み処理を行って算出し、これらアクセル感応目標ヨーモーメントMdtと操舵感応目標ヨーモーメントMstを基に旋回内側内輪に付加する制動力を算出してブレーキ駆動部32に出力する。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による電費向上効果を最大限に生かしつつ、限界領域に近い走行シーンにおいて車両挙動の安定性を確保すること。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段としてモータコントローラ21およびブレーキコントローラ10と、舵角補正ステアリング制御手段として4WASコントローラ22と、車両挙動制御手段として車両コントローラ9と、を備える。車両コントローラ9は、回生協調ブレーキ制御時、車両挙動の乱れを補償するように、舵角補正ステアリング制御により舵角補正をした後、依然として車両挙動が不安定であると判断されたとき(図4のステップS6でNO)、回生協調ブレーキ制御による回生トルクを低下させる制御を行う(図4のステップS7,S8)。
(もっと読む)
電動車両の制御装置
【課題】回生協調ブレーキ制御時、旋回度合いに対応して車両挙動の安定性と回生量の確保との両立を図る。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段と、回生トルク制限手段S14→S15と、閾値決定手段S13と、を備える。回生トルク制限手段は、回生協調ブレーキ制御時、前後車輪速差が、決定された閾値より大きくなると回生トルクを制限する。閾値決定手段は、回生協調ブレーキ制御中における車両の旋回度合いを表す旋回状態量が、旋回度合いが高いことを表すほど前記閾値を下げた値に決定する。
(もっと読む)
ブレーキ制御装置
【課題】車両の状態に応じたブレーキアシストが可能なブレーキ制御装置を提供すること。
【解決手段】本発明のブレーキ制御装置では、横加速度とヨーレイトとに基づいて各輪に対する制動力の配分量を算出する第1制動力配分算出部と、ロール挙動に基づいて各輪に対する制動力の配分量を算出する第2制動力配分算出部と、車両挙動に応じて前記第1制動力配分算出部による配分量と、前記第2制動力配分算出部による配分量とを選択して制動力配分制御を行うこととした。
(もっと読む)
液圧ブレーキ制御装置
【課題】 ドライバのブレーキ操作により発生したマスタシリンダ圧をポンプ増圧してホイルシリンダ圧を制御する際、良好なペダルフィールを実現できる液圧ブレーキ制御装置を提供する。
【解決手段】 制御弁27が設けられマスタシリンダM/CとポンプPの吸入側とを接続する第3ブレーキ回路(管路26,30)と並列に、調圧部(ストロークシミュレータバルブ16、オリフィス17)とストロークシミュレータ14とが直列に並ぶ管路15を設けた。
(もっと読む)
走行支援装置
【課題】車両の前方の検出領域において、車両の進路に向かって横方向から検出領域に進入した物体を極力速く検出して警報を指令するとともに、誤検出を考慮して不適切な衝突回避の実行を防止する走行支援装置を提供する。
【解決手段】走行支援装置は、検出領域の外部から検出領域に、車両の進路に向かって横方向から進入した物体の横移動速度が所定速度以上であり、かつ物体と車両との距離が所定距離以下である場合(S402:Yes)、検出領域の範囲内で通常警報領域の側方に通常警報領域よりも横方向に広がる拡張警報領域を設定する(S408)。車両支援装置は、通常警報領域の外部の拡張警報領域の範囲内であれば(S410:No)、運転者によりブレーキ操作およびステアリング操作がなされておらず、車両と物体との衝突予測時間が所定の警報時間以下の場合(S412:Yes)、運転者に対する警報だけを車両制御ECUに指令する(S414)。
(もっと読む)
制動力制御装置及び制動力制御方法
【課題】運転者がブレーキペダルの操作量を急速に減少させた際に、運転者へ与える違和感を低減することが可能な制動力制御装置及び制動力制御方法を提供する。
【解決手段】運転者によるブレーキペダルの非操作時に第一連通路を介してリザーブタンクと連通するマスタシリンダと第二連通路を介して連通し、且つ車輪に制動力を付与するホイールシリンダの液圧を、ブレーキペダルの操作量に応じてマスタシリンダで発生するマスタシリンダ圧以上の液圧に増圧し、ブレーキペダルの操作量が、予め設定した操作量閾値以上から当該操作量閾値未満に減少すると、マスタシリンダ圧以上の液圧に増圧した液圧に対する、増圧の度合いを減少させ、且つブレーキペダルの戻し方向への操作速度が予め設定した操作速度閾値以上の場合に、操作速度が操作速度閾値未満の場合よりも、操作量閾値を大きくする。
(もっと読む)
制動力制御装置及び制動力制御方法
【課題】運転者がブレーキペダルの操作量を急速に減少させた際に、運転者へ与える違和感を低減することが可能な制動力制御装置及び制動力制御方法を提供する。
【解決手段】運転者によるブレーキペダルの非操作時に第一連通路を介してリザーブタンクと連通するマスタシリンダと第二連通路を介して連通し、車輪に制動力を付与するホイールシリンダの液圧を、ブレーキペダルの操作量に応じてマスタシリンダで発生するマスタシリンダ圧以上の液圧に増圧し、ブレーキペダルの操作量が、予め設定した操作量閾値以上から操作量閾値未満に減少すると、マスタシリンダ圧以上の液圧に増圧した液圧に対する増圧量を減少させ、且つブレーキペダルの戻し方向への操作速度が予め設定した操作速度閾値以上の場合に、操作速度が操作速度閾値未満の場合よりも、第二連通路を流れるブレーキ液の流量を減少させる。
(もっと読む)
車両用情報処理装置
【課題】 要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる車両用情報処理装置を提供する。
【解決手段】 車両用情報処理装置は、要減速地点の地図情報を記憶する地図情報記憶手段と、車両の位置を検出する車両位置検出部21と、車両の減速等操作を検出する減速等操作検出部24と、要減速地点の手前位置であって、減速等操作が行われた位置を学習する減速等操作位置学習部26と、を備え、減速等操作位置学習部26は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習する。
(もっと読む)
車両用挙動制御装置
【課題】カーブ進入時だけでなくカーブ内においてもドライバの危険感に合った減速制御を実行することができる車両用挙動制御装置を提供する。
【解決手段】自車がカーブ内に位置すると判定した場合には、減速制御において、接近離間状態評価指標KdBに基づいた第1修正目標相対速度算出式を適正道路境界距離とカーブ内適性道路境界距離との差分をもとに修正した第2修正目標相対速度算出式を用いて第2修正目標相対速度を算出する。
(もっと読む)
車両用制御装置
【課題】実ヨーレートの急変の影響を受けることなく、実横加速度を適正に補正することができる車両用制御装置を提供することを目的とする。
【解決手段】車両用制御装置(制御部20)は、実ヨーレートYsの変化率が所定値以上か否かを判断する急変判定手段209と、舵角センサ92で検出する舵角量に基づいて規範ヨーレートYcを算出する規範ヨーレート演算手段202と、急変判定手段209によって変化率が所定値未満であると判断された場合には、実横加速度Gysを実ヨーレートYsに基づいて補正し、急変判定手段209によって変化率が所定値以上であると判断された場合には、実ヨーレートYsを規範ヨーレートYcに切り替えて実横加速度Gysを補正する補正手段220と、を備えている。
(もっと読む)
車両の制動制御装置
【課題】 車両の旋回挙動を安定して制御可能な車両の制動制御装置を提供する。
【解決手段】 コントロールユニット3は、車両のアンダーステア傾向を抑制するヨーモーメントを車両に付加すべく車両の旋回内輪の前後輪を制御対象輪として制動力を付与する制動力制御手段(前後目標ヨーモーメント算出部23、各輪目標制動力算出部24および液圧制御装置4)と、操舵速度dθを検出する操舵速度検出手段と、操舵速度dθが高いほどフロントヨーモーメント配分を大きくするヨーモーメント配分算出部22と、を備える。
(もっと読む)
車両制御装置
【課題】車線逸脱防止制御が終了したときであっても、自車両の走行路外への逸脱を抑制する。
【解決手段】車線逸脱判断部14によって車線逸脱傾向が有ると判定された場合に、ヨーモーメント指令値算出部15によって車線逸脱防止ヨーモーメント及び路外逸脱防止ヨーモーメントを演算し、車線逸脱防止ヨーモーメントを付与する。車線逸脱防止制御終了判断部16は、車線逸脱防止ヨーモーメントの付与開始から所定時間を経過した場合、自車両の運転者によって運転操作の入力が有った場合、又は、自車両のヨー角が所定値以下となった場合の何れかの場合に、当該車線逸脱防止ヨーモーメントの付与を終了する。ヨーモーメント指令値補正部17は、車線逸脱防止ヨーモーメントの付与を終了した時刻から、路外逸脱傾向が有ると判断した時刻までの時間が長いほど、路外逸脱防止ヨーモーメントを小さく補正する。
(もっと読む)
車両駐車支援制御装置及び車両駐車支援制御方法
【課題】自車両周囲の障害物に対する運転支援をより適切に実施可能な車両駐車支援制御技術を提供する。
【解決手段】自車両周囲の障害物との距離が予め設定した制御開始距離以下となったと判定すると、その制御開始距離以下となった障害物への自車両の接近を防止して運転者の運転を支援する運転支援制御を行う際に、自車両が駐車位置に向けて移動中と判定している場合、上記運転支援制御を抑制する。
(もっと読む)
121 - 140 / 864
[ Back to top ]