
Fターム[3D246HA13]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 操舵状態 (1,157) | 運転者の操舵状態 (1,067) | ハンドル舵角 (864)
Fターム[3D246HA13]に分類される特許
41 - 60 / 864
車両の緊急退避装置のための路端障害物検出装置
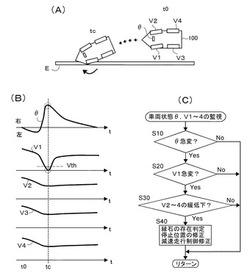
【課題】 路端の比較的小さな障害物や縁石を検出可能な緊急退避装置のための路端障害物検出装置を提供すること。
【解決手段】 本発明の車両の路端障害物検出装置は、車輪速度の変化量と舵角の変化量とに基づいて路端上の障害物を検出することを特徴とする。障害物の検出に於いては、例えば、舵角の急変と車輪速度の急変、変化量の急激な増減、変化方向の逆転など、が検知される。従って、本発明の路端障害物検出のために車載カメラ等の非接触的な検知手段は使用されない。
(もっと読む)
車両運転支援装置

【課題】ドライバーの運転操作の経年的な衰えを検出し、検出した衰えに応じた車両運転の支援を行う。
【解決手段】ドライバーの年齢別およびブレーキ操作開始時の車速別に、車両のブレーキ操作開始から車両停止までの期間における、車両の減速挙動を表す減速挙動データ(制動距離、減速度の標準偏差)を、減速時学習データとして記録し、当該減速時学習データが記録された後、車両のブレーキ操作開始時(ステップ210)に、減速時学習データ中の最新の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、学習データ中の最新よりも過去の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、を比較し(ステップ220)、その比較結果に基づいて、ドライバーの運転能力が所定基準以上に衰えているか否かを判定し(ステップ230、240)、判定結果に応じて制動力を変化させる。
(もっと読む)
アイドリングストップシステムおよびアイドリングストップの方法
【課題】アイドリングストップからのエンジン再始動時に各種ECUの誤動作を抑制し、エンジンの再始動を円滑に行う。
【解決手段】本発明に関わるアイドリングストップシステムは、車両1の走行停止状態において原動機4を停止および再始動するアイドリングストップシステムであって、ブレーキペダルp2の操作によって発生した制動力を少なくとも一時的に保持する制動力保持制御を実行する制動制御装置6と、ブレーキペダルp2の操作中において、所定の再始動条件が成立した際に停止中の原動機4を再始動する原動機制御装置4Eと、原動機4の再始動に先立って原動機制御装置4Eおよび制動制御装置6以外の少なくとも一つの車両制御デバイス8、9、6、10、11への通電あるいはその診断を一時的に停止する消費電力低減手段4E、8、9、6、10、11とを備えている。
(もっと読む)
車両用制動制御装置
【課題】従来よりも適切な車両の制動制御を可能とする車両用制動制御装置を提供する。
【解決手段】自車両と障害物との衝突の危険性に応じて自動的に車両を制動する車両用制動制御装置であって、自車両と障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、衝突判定手段によって自車両と障害物との衝突の危険性が高いと判定された場合、自車両に自動的に制動力を発生させる自動制動手段と、自動制動手段が発生させる制動力の大きさを自車両のドライバーの操舵操作に応じて漸減する制動力漸減手段とを備え、制動力漸減手段は、制動力の漸減速度を自車両のドライバーのアクセル操作に応じて速くすることを特徴とする。
(もっと読む)
車両のパーキングロック制御装置
【課題】 電力消費を抑制可能な車両のパーキングロック制御装置を提供すること。
【解決手段】 本発明の車両のパーキングロック制御装置では、パーキングロック作動指令が出力されたときは、いずれか一方のパーキングロック機構を作動させると共に、推定又は検出された車両の移動が所定以上移動するときは、他方のパーキングロック機構に接続されたモータにより車両の移動を抑制するトルクを発生させることとした。
(もっと読む)
制駆動力制御装置および制駆動力制御方法
【課題】制振のための制駆動力制御を行う際に、制御介入時の動作をより適切なものとすること。
【解決手段】車両における制駆動状態に基づいて、車両に働く荷重を安定化させるための荷重安定化制駆動力指令値を算出する荷重安定化制駆動力指令値算出手段と、車両における操舵状態に基づいて、車両の荷重を付加するための荷重付加制駆動力指令値を算出する荷重付加制駆動力指令値算出手段と、車両の走行状況に基づいて、走行環境の安定度合いを示す荷重安定化指標を算出する荷重安定化指標算出手段と、操舵入力に基づいて、操舵操作の安定度合いを示す荷重付加指標を算出する荷重付加指標算出手段と、荷重安定化制駆動力指令値と、荷重付加制駆動力指令値と、荷重安定化指標と、荷重付加指標とに基づいて、制駆動力制御手段による制駆動力の付与状態を制御するトルク制御手段とを有する制駆動力制御装置とした。
(もっと読む)
ブレーキ装置
【課題】ブレーキ装置において、ノックバックによる応答性の低下を防止しつつ、ディスクロータ及びブレーキパッドの偏摩耗を防止する。
【解決手段】通常は、ブレーキペダル19の操作によってマスタシリンダ4で発生した液圧をディスクブレーキ2に直接供給して制動力を発生させる。また、コントローラ14によって液圧ポンプモータ7を作動させてディスクブレーキ2に液圧を供給することによって制動力を発生させることができる。急旋回等によってノックバックが生じた場合、ピストン16の後退を許容することにより、ブレーキパッド17及びディスクロータ18の偏摩耗を防止する。その後、ノックバックの要因が解除されたとき、コントローラ14によって液圧ポンプモータ7を作動させ、ピストン16を前進させてパッドクリアランスを調整することにより、応答性の低下を防止する。
(もっと読む)
車両の運動制御装置
【課題】車両がカーブに進入する際において運転者が受ける安心感が考慮されて減速制御が実行される車両の運動制御装置を提供すること。
【解決手段】この装置では、運転者の安心感に影響を与える、カーブの曲率半径、登降坂勾配(上り・下り勾配)、ブラインドカーブ、及び勾配急減部分の4つの観点が考慮されて許容横加速度基準値Gyaが補正されて許容横加速度Gyoが演算・調整される。この調整された許容横加速度とカーブの曲率半径とに基づいてカーブを通過する際における適正車速が決定される。そして、所定の減速制御開始条件が成立すると、運転者の加減速操作の有無にかかわらず、減速制御が開始・実行されて、車速が上記適正車速まで減速される。このように、運転者の安心感が考慮されて許容横加速度(従って、適正車速)が決定されるから、運転者に違和感を与えることなく、減速制御が実行され得る。
(もっと読む)
運転操作予測装置
【課題】ドライバのハンドル回避操作前の準備操作を検出することにより、限定的な状況下でのドライバのハンドル回避意思を高精度に予測する。
【解決手段】外部環境イベント及び運転操作イベントを検出し(S2)、外部環境イベントと運転操作イベントとの時間関係にルールが反応したとき、そのルールの結論に応じて重みを加算或いは減算することにより、ハンドル回避意思推定値Hを計算する(S3)。そして、制御介入の必要性を判定し(S4)、制御介入の必要性がある場合、ハンドル回避意思推定値Hの値を参照する(S5)。その結果、H>0の場合には、ドライバのハンドル操作による回避意思が高いものと判断して制御介入しない或いは介入を遅らせる等して制御介入を自重し(S6)、一方、H≦0の場合には、ドライバのハンドル操作による回避意思が低いものと判断してシステムによるブレーキ介入を実行させる(S7)。
(もっと読む)
ブレーキ制御装置
【課題】ドライバのブレーキ操作を反映でき、かつ、ブレーキフィーリングに影響を与えなくてもノックバック現象を抑制できるようにする。
【解決手段】ノックバックが発生する可能性の有無を判定し、ノックバック可能性ありと判定されたときには、EPBを駆動することでノックバックによる不具合が解消できるようにする。すなわち、モータ10を逆回転させて推進軸18を後退させることで推進軸18の先端をピストン19の底部から離間させられるようにし、ノックバック可能性がなくなったら、モータ10を正回転させて推進軸18を前進させることでピストン19を通常時の位置に戻すピストン補正移動を行ったのち、その後再度、推進軸18を後退させることで待機位置に戻す待機位置移動を行うようにする。
(もっと読む)
車両の挙動制御装置
【課題】自動操舵制御からドライバ操舵への切り替え時における違和感の発生を防止する。
【解決手段】ドライバの操舵から独立して車両状態量を変化させることが可能な少なくとも一つの装置を備えた車両において、車両の挙動制御装置は、前記少なくとも一つの装置のうちの少なくとも一つである対象装置を介して、前記車両状態量を目標状態量に収束させるための自動操舵制御を実行する自動操舵制御実行手段と、ハンドル角を検出するハンドル角検出手段と、前記自動操舵制御がドライバの操舵に応じたドライバ操舵へ切り替わる場合に、前記ドライバ操舵において前記ハンドル角と相関する一の前記車両状態量について、前記自動操舵制御により生じた第1状態量と、前記検出されたハンドル角に対し生じるべき第2状態量とが一致するように、前記少なくとも一つの装置を制御する状態量一致化手段とを具備する。
(もっと読む)
走行支援装置及び方法
【課題】運転者の意図によって1次操舵後に2次操舵を行う場合に、不要な支援を低減する技術を提供する。
【解決手段】車輌の走行可能な走路からの車輌逸脱時に、車輌を前記走路内で走行させるように警告又は補助の支援を行う走行支援装置であって、1次操舵量が前記支援を停止するか否かの閾値となる第1所定量を超えたことにより、前記支援を停止しているときに、さらに2次操舵量が前記支援の停止を延長するか否かの閾値となる第2所定量を超える場合には、前記支援の停止を延長する。
(もっと読む)
ハイブリッド車両の回生制動制御装置
【課題】バッテリ入力限界値の制約にかかわらず回生制動の分担割合を最大にして、回生制動による燃費向上を最大限に享受する。
【解決手段】自動走行中、車速VSPを(a)のごとくt1〜t2間において低下させる減速要求があった時でも、(b)のごとくt1よりも前のt0に回生制動を開始させる。つまり、自車前方情報から設定した停車目標位置、および、自車の走行情報から、車速VSPを運転者が設定した目標車両減速度で規定車速まで低下させるのに必要な要求制動エネルギーを算出し、この要求制動エネルギーを回生制動のみで発生させる場合に必要な回生制動開始位置を演算し、この回生制動開始位置に到達したt0より回生制動を行わせる。よって先読み分だけ要求制動力エネルギーを小さな回生制動力Trで発生させ得て、摩擦制動に頼らず回生制動のみにより要求制動エネルギーを発生させ得て、エネルギー回収率(燃費)を改善することができる。
(もっと読む)
車両用緊急停止装置
【課題】運転者が運転操作を継続できない非常時に、運転者以外の乗員が即座に車両を緊急停止させることができるようにしながら、その緊急停止の指示が誤ってなされた場合には、車両の緊急停止動作を円滑に解除する。
【解決手段】車両用緊急停止装置100は、緊急停止スイッチ102を有し、この緊急停止スイッチ102が操作されたときに車両を緊急停止させる。ただし、このような緊急停止スイッチ102は、誤操作される可能性もあるので、運転者によって操作されるアクセルペダルの動作状態に基づき、車両の運転者が運転操作を行ないうる状態であるか否かを判断し、車両の運転者が運転操作を行いうる状態であると判断された場合には、緊急停止スイッチ102の操作がなされたとしても、その緊急停止スイッチ102の操作に基づくブレーキの作動を停止させる。
(もっと読む)
衝突回避装置
【課題】ユーザーが煩わしさを感じることのないPCS制御を行うことのできる衝突回避装置を提供する。
【解決手段】検出手段と、検出された物体を衝突判断対象物とし、当該衝突判断対象物と自車両とが衝突する可能性を判断する衝突判断手段と、衝突判断対象物と自車両との衝突を回避するための衝突回避制御を行う制御手段と、衝突回避制御を解除する解除手段と、自車両の位置を示す情報および自車両の車両情報の少なくとも一方の情報を取得する車両情報取得手段と、衝突回避制御の態様を変更する変更手段と、解除手段によって衝突回避制御が解除されたときの自車両の位置を示す情報を解除時位置情報として、解除手段によって衝突回避制御が解除されるときの自車両の車両情報を解除時車両情報として車両情報取得手段から少なくとも一方を取得し記憶する記憶手段とを備える。
(もっと読む)
先行車追従走行装置
【課題】燃費の悪化が抑制でき、且つ、先行車に対する追従性も良好な先行車追従走行装置を提供する。
【解決手段】先行車追従制御において、摩擦ブレーキ開始閾値式(L1)、エンジンブレーキ開始閾値式(L2)、加速制御終了閾値式(L3)を用いて、摩擦ブレーキ開始閾値、エンジンブレーキ開始閾値、加速制御終了閾値を逐次算出する。そして、エンジンブレーキ開始閾値と加速制御終了閾値の間を等速領域とし、KdB_cの現在値が等速領域にあれば等速制御を行う。等速制御を行うことができる結果、加減速の頻度が低下するので、燃費の悪化が抑制できる。また、減速の頻度が少なくなることにより、割り込み車が加速した場合や、先行車が減速後、再加速した場合に、先行車に追従するための加速が少なくて済むので、追従性も良好となる。
(もっと読む)
車両のブレーキ制御装置
【課題】車両旋回時の車体の姿勢変化を早期に検知して姿勢変化を早期に抑制することによって車両の走行安定性を高めることができる車両のブレーキ制御装置を提供すること。
【解決手段】車輪速センサ17によって検出される各車輪5L,5R,6L,6Rの速度と操舵角センサ21によって検出された操舵角に基づいて算出される目標ヨーレートとヨーレートセンサ20によって検出される実ヨーレートとの偏差が閾値を超えるとオーバーステアと判断して旋回外側の駆動輪(前輪5L,5R))にアクティブブレーキを掛けることによって旋回時の車体の姿勢変化を抑制するスタビリティ制御を行う車両のブレーキ制御装置(ECU16)において、旋回内側の非駆動輪(後輪6L,6R)の浮き上がりが検出されると、前記スタビリティ制御を開始する目標ヨーレートと実ヨーレートとの偏差の閾値を小さい値に変更する。
(もっと読む)
制動力制御装置
【課題】緊急停止時に車両の移動を速やかに規制することが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12は、車両10の駐車時に車両10の移動を規制する移動規制手段22、62a〜62dを備える。移動規制手段22、62a〜62dは、緊急ブレーキ制御手段118が作動して車両10が停車したと判定したとき、運転者による駐車操作がなくても、車両10の移動を規制する。
(もっと読む)
制動力制御装置
【課題】車両をより早く減速させることが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12では、車体速度Vv若しくは車輪速度Vw又はこれらの目標値が所定速度以下であり、且つ緊急ブレーキ制御手段118による緊急ブレーキ及びアンチロックブレーキ制御手段110によるアンチロックブレーキが作動しているとき、前記アンチロックブレーキによるブレーキ液圧の減少を抑制する。
(もっと読む)
加加速度情報を用いた車両の運動制御装置および方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度を検出する第1の検出手段と、車両の横方向の加加速度を検出する第2の検出手段と、を有し、前記制御手段は、前記第2の検出手段により検出した車両の横方向の加加速度(Gy_dot)を、前記第1の検出手段により検出した車両の前後方向の速度(V)で除した車両のヨー角加速度(r_ref_dot)に基づいて車両のヨーモーメントの制御指令を生成し、前記制御指令を出力する車両の運動制御装置。
(もっと読む)
41 - 60 / 864
[ Back to top ]