
Fターム[3D246HA13]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 操舵状態 (1,157) | 運転者の操舵状態 (1,067) | ハンドル舵角 (864)
Fターム[3D246HA13]に分類される特許
21 - 40 / 864
車両の運動制御装置
【課題】
日常運転領域から稼動するハンドル操作に連係した加減速を自動的におこない、限界運転領域で横滑りを確実に低減させるという、違和感が少なく、安全性能向上を可能とする技術および装置を提供する。
【解決手段】
前輪及び後輪の駆動力又は/及び制動力を制御可能な車両の運動制御装置において、横軸に車両の前後加速度、縦軸に車両の横加速度をとるダイアグラムを定義したときに、時間の経過とともに当該ダイアグラム上で曲線的な遷移をするように加減速制御指令を決定するコントローラと、加減速制御指令に基づいて、制動力又は/及び駆動力を決定する制動力駆動力配分部と、を有する。
(もっと読む)
車両の制御装置

【課題】旋回走行時の車両挙動を安定させるための駆動力制御および制動力制御を、運転者に違和感やショックを与えることなく、適切に実行することができる車両の制御装置を提供すること。
【解決手段】操舵角および横加速度に基づいて駆動力もしくは制動力を補正して変化させることにより、旋回走行時の車両挙動を安定させる制駆動力制御を実行可能な車両の制御装置において、ステアリングの切り込み操作および戻し操作における操作時間および/または操作速度を検出するステアリング操作検出手段(ステップS105,S106,S107,S108)と、前記切り込み操作および前記戻し操作が行われる際に、前記操作時間もしくは前記操作速度に基づいて、前記補正により前記駆動力もしくは前記制動力を変化させる際の変化速度を設定する制駆動力設定手段(ステップS110,S111)とを設けた。
(もっと読む)
車両の制動力制御装置
【課題】車両旋回時のタイヤのコーナリングフォースを有効に最大限発揮させ、安定した車両挙動でカーブ外側へのコースアウトを確実に防止する。
【解決手段】車速V、ハンドル角θHに基づいて目標横加速度を算出し、目標横加速度と実際の横加速度とに基づいて車両1に付加すべき第1の付加ヨーモーメントMzt1を算出し、目標横加速度と実際の横加速度とに基づいて第1の付加ヨーモーメントMzt1に加えて車両1に付加すべき第2の付加ヨーモーメントMzt2を算出し、第1の付加ヨーモーメントMzt1に基づいて旋回内側車輪に付加する制動力を第1の制動力FB1として算出し、第2の付加ヨーモーメントMzt2に基づいて旋回内側車輪と旋回外側車輪との間の制動力差を変えることなく車両1に付加する制動力を第2の制動力FB2として算出し、第1の制動力FB1と第2の制動力FB2に基づいて各輪に付加する制動力を算出する。
(もっと読む)
車載電子制御装置
【課題】ペダルの踏み間違いを検出するための判定条件を運転者に応じて適切に設定する
【解決手段】車両制御システム1では、自車両に取り付けられたブレーキペダルが踏み込まれておらず且つ自車両に取り付けられたアクセルペダルが踏み込まれていない状態(以下、両ペダル非踏込状態という)から、ブレーキペダルまたはアクセルペダルが踏み込まれた状態に移行した時点における、自車両と自車両の前方を走行する先行車両との間の車間距離(以下、先行車間距離という)を学習し、この学習結果と、アクセルペダルが踏み込まれた時点(以下、アクセル踏込時点という)での先行車間距離(以下、アクセル踏込時車間距離という)とを比較することによって、アクセル踏込時点におけるアクセルペダルの操作が間違いであるか否かを判断する。
(もっと読む)
車両挙動制御システム
【課題】車両の挙動を安定化させることができる車両挙動制御システムを提供することを目的とする。
【解決手段】車両2の各車輪3に生じる制動力を個別に調節可能な制動装置7と、制動装置7を制御して車輪3のスリップ状態を制御するABS制御及び車両2の旋回状態を制御する旋回制御を実行可能な制御装置8とを備え、制御装置8は、ABS制御及び旋回制御の作動中に、車両2に作用する横方向加速度の絶対値が予め設定された所定加速度以下である場合に制動力の増加勾配を制限する一方、横方向加速度の絶対値が所定加速度より大きい場合に制動力の増加勾配を制限せず、さらに、制御装置8は、旋回制御における旋回制御量の絶対値が予め設定された所定制御量より大きい場合には制動力の増加勾配を制限しない。
(もっと読む)
車体速度制御装置
【課題】運転者に対して快適な運転支援が行われるように車体速度を制御できる車体速度制御装置を提供すること。
【解決手段】ブレーキ制御ECU1が、速度制御位置設定処理を実行することにより、積荷スペースに荷物が搭載された場合には(S12:Yes)、車輪速度の演算される位置(制御位置)として積荷スペースの位置が設定され(S13)、車両VLの走行路が狭幅道路である場合には(S14:Yes,S15:Yes)、車輪速度の演算される位置(制御位置)として旋回外側のフェンダーミラーの先端の位置が設定される。このように、車両における状況や環境に応じて、搭乗者に対する運転支援を行うのに適切な位置を車体速度が制御される位置として設定することができるので、搭乗者に対して快適な運転支援が行われるように車体速度を制御できる。
(もっと読む)
移動体通信装置及び追突防止支援方法
【課題】感知エリア外に追突する可能性がある他の移動体(他の車両)が存在する可能性があるときに、当該追突する可能性がある他の移動体(他の車両)との事故を未然に防ぐ追突防止支援を行う移動体通信装置及び追突防止支援方法を提供すること。
【解決手段】移動体に備えられ、感知器が検出した感知エリアに存在する他の移動体の情報を含む情報を受信する通信部と、前記感知エリアに他の移動体が存在するときに、報知部を介して減速目標位置に到達するまでに前記移動体の移動速度を減速目標速度にするよう報知を行う制御部と、を備える移動体通信装置であって、前記制御部は前記感知エリアに存在する他の移動体の情報に基づいて、前記感知エリア外に追突する可能性がある他の移動体が存在するか否かを判断し、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときは、前記減速目標位置及び/又は前記減速目標速度を変更することとする。
(もっと読む)
車両の制動制御装置
【課題】旋回方向内側の車輪に制動力を付与させる旋回時制動制御の終了条件の成立に伴って該制動力を減少させる際に、車両の乗員が感じる旋回方向外側への飛び出し感を小さくすることができる車両の制動制御装置を提供する。
【解決手段】ブレーキ用ECUは、小回り制御の終了条件が成立した場合(ステップS13:YES)に取得されたステアリングの操舵角Aに基づき、旋回方向外側への力が大きいほど、旋回方向内側の車輪に対する制動力の減少速度Vbが低速度となるように減少制御を行う(ステップS21)。
(もっと読む)
車両の制動制御装置
【課題】車両の旋回時に、旋回方向内側の車輪に制動力を付与させる旋回時制動制御が運転手の意図に反して行われることを抑制できる車両の制動制御装置を提供する。
【解決手段】ブレーキ用ECUは、作動ボタンがオン状態である場合(ステップS10:YES)、車両の車体速度VS及びステアリングの操舵角Aを取得する(ステップS11,S12)。そして、ブレーキ用ECUは、取得した車体速度VS及び操舵角Aに基づき、規定時間Tthの間、車両の走行状態が直進状態であることが継続中であるという第1の条件が成立した場合(ステップS19:YES)、作動ボタンをオン状態からオフ状態に自動的に変更させる(ステップS20)、又は作動ボタンの操作状態をオフ状態に変更することを促す。
(もっと読む)
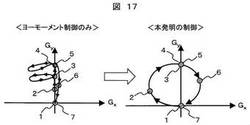
車両のヨーモーメント発生旋回効率化装置
【課題】急な旋回の必要時に車両の旋回ヨーモーメントを効率的に発生させることができて、緊急操舵時の確実な転舵が行えるヨーモーメント発生旋回効率化装置を提供する。
【解決手段】左右の車輪1L,1Rを独立して制動力制御または駆動力制御可能なブレーキ4L,4Rおよび駆動系6のいずれか一方と、前記左右の車輪1L,1Rを独立して転舵可能な転舵装置3とを備えた車両20に適用される。操舵手段18の指令に従って転舵装置3を駆動するときに、左右の車輪1L,1Rの転舵動作に時間差を生じさせると共に、左右の車輪1L,1Rの制動・駆動力差を生じさせて旋回ヨーモーメントを発生させる旋回アシスト制御を行う制御手段9を設ける。
(もっと読む)
車両の運動制御装置
【課題】簡単な構成でハンドル角が小さな低横加速度旋回領域とハンドル角が大きな高横加速度旋回領域を含む全横加速度旋回領域において車両の運動状態を的確に制御して操縦安定性を高めることができる車両の運動制御装置を提供すること。
【解決手段】車速とハンドル角に基づいて目標ヨー角速度を算出し、算出された目標ヨー角速度と実際のヨー角速度との偏差が実質的に0になるよう車両の運動を制御するECU(制御手段)と、を備える車両の運動制御装置において、前記ECUは、ハンドル角が所定の閾値よりも小さい低横加速度旋回領域においてはハンドル角に比例する目標ヨー角速度を使用し、ハンドル角が前記閾値よりも大きい高横加速度旋回領域においてはハンドル角に依存しない最大横加速度で車両が定常円旋回するときのヨー角速度を目標ヨー角速度として使用して車両の運動を制御する。
(もっと読む)
前後加速度推定装置
【課題】車両の前後加速度又は路面摩擦係数若しくは路面状態の推定精度を向上させることが可能な前後加速度推定装置を提供する。
【解決手段】前後加速度推定装置22は、加速操作又は減速操作の開始時点における前後加速度センサ42の検出値と、その後の前後加速度センサ42の検出値との差を、車両10の前後加速度の推定値として算出する加速度推定手段110を有する。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
制動力制御装置
【課題】路面推定の精度を向上させることが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12では、前後Gセンサ42が検出した車両10の前後加速度である前後G検出値に基づいて路面推定を行う路面推定手段110と、ホイールシリンダ62a〜62dにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪18のロックを防止するアンチロック制御手段112とを備える。路面推定手段110は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧保持となっている車輪18の数に応じて前記前後G検出値を補正した前後G補正値に基づいて路面推定を行う。
(もっと読む)
車両挙動制御装置
【課題】応答性良く予備ブレーキ圧を印加すること。
【解決手段】前後の旋回外輪WFL,WRL(WFR,WRR)の内の少なくとも一方に制動制御量を発生させることで車両10の挙動を安定させる車両挙動安定化制御を行う場合、その制動制御量を前後夫々の旋回外輪WFL,WRL(WFR,WRR)に発生させる条件が成立した場合に、前後の旋回内輪WFR,WRR(WFL,WRL)の内の少なくとも一方に対して予備ブレーキ圧を印加すること。その予備ブレーキ圧の印加は、車両挙動安定化制御の実行中に今の車両10の旋回動作とは逆向きの操舵操作が検知されたときに実行する。
(もっと読む)
車両トレーラに接続される牽引車を制御する方法及びシステム
【課題】トレーラを牽引する牽引車を制御するための、改善された方法及びシステムを提供する。
【解決手段】車両トレーラ102に接続されている牽引車100を制御する方法、及び当該方法を使用するシステム。本方法は、車両目標のセット及び当該車両目標のセットに応答する車両状態のセットを検知することを含む。本方法は、車両目標のセットと車両状態のセットとの間の複数の差を求めること、当該複数の差の傾向を求めること、当該傾向に基づいて対称信号及び非対称信号のうちの少なくとも一方を生成すること、並びに、当該対称信号及び非対称信号のうちの少なくとも一方を用いて車両システムを作動させることも含む。
(もっと読む)
電磁ブレーキ付作業車両
【課題】電磁ブレーキ付作業車両において、左右の電磁ブレーキのうち、一方の電磁ブレーキの異常発生時でも、運転者の意図しない旋回を有効に防止することである。
【解決手段】電磁ブレーキ付作業車両である芝刈車両10は、左右の電磁ブレーキ32,36と、共通ブレーキ解除手段であるブレーキリレーと、ECUとを含む。ECUは、左右の電磁ブレーキの通電状態を比較し、比較部で比較した通電状態の差が許容上限を超える場合に、バッテリと左右の電磁ブレーキ32,36との電気的接続を遮断して左右車輪18,20を制動させるようにブレーキリレーを制御する。
(もっと読む)
ブレーキ制御装置
【課題】構造をより簡単化できるブレーキ制御装置を提供する。
【解決手段】回生制動装置を備えた車両に用いられるブレーキ装置であって、ブレーキ操作状態検出部5と、第1ブレーキ回路11Pと、第2ブレーキ回路19Pと、第3ブレーキ回路21FLと、第4ブレーキ回路22Pと、ポンプP、流入弁、流出弁、リザーバ24P、と第4ブレーキ回路上であって、リザーバと第3ブレーキ回路との接続位置との間に設けられ、回生制動装置の作動状態に応じて作動するカットオフ弁28Pを備えた。
(もっと読む)
制駆動力制御装置および制駆動力制御方法
【課題】制駆動力による車体の制振制御を操舵状態に応じてより適切に行うこと。
【解決手段】車両の走行状況に基づいて、車体のバネ上挙動を推定する挙動推定手段と、推定した車体のバネ上挙動に応じて、車両の荷重を安定化させるための荷重安定化補正トルクを算出する荷重安定化補正トルク算出手段と、推定した車体のバネ上挙動に応じて、車両の荷重を付加するための荷重付加補正トルクを算出する荷重付加補正トルク算出手段と、荷重安定化補正トルクおよび荷重付加補正トルクに基づいて、制駆動トルクを補正する制御にハンチングが発生しているか否かを判定するハンチング判定手段と、車両における操舵状態と、ハンチング判定手段の判定結果とに基づいて、荷重安定化補正トルクおよび荷重付加補正トルクの付与度合いを決定する運動ゲインを算出する運動ゲイン算出手段とを有する制駆動力制御装置とした。
(もっと読む)
ブレーキ制御装置
【課題】回生制動力から摩擦制動力へのすり替えの応答性をより高めることができるブレーキ制御装置を提供する。
【解決手段】ブレーキ回路(管路22P,22S,25FL,25FR)上であってソレノイドアウトバルブ26FL,26FRよりもポンプPの吸入部10aに設けられると共に、ブレーキ回路(管路21P,21S,22P,22S)に接続するリザーバ24P,24Sと、ポンプMP、MSが回転駆動されているときに吐出弁20P,20Sからのブレーキ液の吐出を制限するポンプ吸入遮断バルブ29P,29Sと、を備えた。
(もっと読む)
21 - 40 / 864
[ Back to top ]