
Fターム[3D246HA25]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 変速機 (375)
Fターム[3D246HA25]に分類される特許
201 - 220 / 375
車両用動力伝達装置の制御装置

【課題】回生走行中に変速制御が実施されるに際して、制動装置による補償制御を実施する車両用動力伝達装置において、その制動装置の耐久性を向上することができる車両用動力伝達装置の制御装置を提供する。
【解決手段】制動補償制御手段98は、自動変速部20の変速ショックをとり難いダウンシフトにおいて実施されるため、制動補償制御手段98を変速ショックのとり難いダウンシフトにおいて実施させる一方、他のダウンシフトでは実施させないことで、制動装置45を作動させる頻度が低下するに従い、制動装置45の耐久性を向上させることができる。
(もっと読む)
車両の運動制御装置

【課題】操舵操作に基づいて急激なヨーイング挙動の発生を予測し、車両安定性制御における制動液圧の応答性を向上させることができる車両の運動制御装置を提供する。
【解決手段】車両のオーバステアを抑制する車両安定性制御を実行する車両運動制御装置において、操舵角に基づいて急激な車両のヨーイング挙動を予測し、適切な車輪の制動手段に対して予圧を付与する予圧制御を実行する。操舵角センサによって操舵角を検出し、検出された操舵角に基づいて操舵角速度を演算する。操舵角が増加するときに操舵の切り返し状態を判定し、切り返し操舵状態のときの操舵角速度が大きい場合に、制動手段に対して予圧を付与する予圧制御を実行する。
(もっと読む)
車両用動力伝達装置
【課題】制動装置の耐久性が低下しない範囲で制動補償制御の効果を可及的に享受することができる車両用動力伝達装置を提供する。
【解決手段】第2電動機MG2と、その第2電動機MG2の出力回転速度NOUTを変速する自動変速部20と、車輪38の回転を制動する制動装置45と、回生制動トルクTB−REが発生しているときに自動変速部20のダウン変速が行われる場合は、そのダウン変速の開始前後においてその変速中に制動装置45を一時的に作動させる制動補償制御を実行する制動補償制御手段90とを、備えた動力伝達装置10であって、制動補償制御手段90は、回生制動トルクTB−REが発生しているときに自動変速部20の所定ダウン変速が行われた変速頻度すなわち割合値Aに応じて実施範囲を変更するものである。
(もっと読む)
車両の制御装置及びその制御方法
【課題】エンジンを自動停止自動始動後にヒルホールド制御を行うアイドルストップ制御において、ホイールブレーキ作動圧の保持解除を最適に行うことで操作応答性に優れた車両の制御装置及び車両の制御方法を提供することである。
【解決手段】エンジン自動停止後、S13でエンジン始動条件が成立したか否か判定され、Yesの場合、エンジン1に始動指令を送りエンジンを始動させると共に、タービン回転数が600rpmを越えて300rpmを下回るまでヒルホールド制御部がブレーキ液圧を保持する。タービン回転数が300rpmを下回ると、ブレーキ液圧Pが減圧される(S17)。
(もっと読む)
坂道発進アシスト機能を有する自動車の運転を安全に行なう方法、及びそのような自動車
自動車の発進指令に続いて、坂道発進アシスト(53)が実行される前に少なくとも1つの条件を確認し(50、51、52)、前記条件が満たされる場合に、前記坂道発進アシスト(53)の実行を防止する。 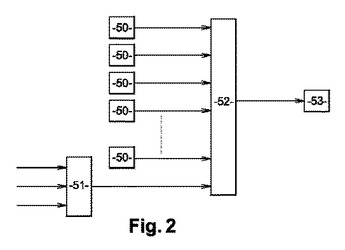 (もっと読む)
(もっと読む)
車両の前後力制御装置
【課題】障害物等を緊急回避するために車輪の制動力を制御する車両の前後力制御装置において、制御が不必要に継続して車両の安定性を損なうことがないものを提供すること。
【解決手段】障害物回避補助制御として、第1制御、第2制御、第3制御がこの順で続けて実行される。第1制御では、左右輪の前後力差に基づく旋回方向のヨーモーメントを発生させるため旋回内輪の制動力の和が旋回外輪の制動力の和よりも大きくなるよう各車輪の制動力がパルス的に調整される。第2制御では、タイヤの横力を増加させるため車両の全車輪の制動力の総和が第1制御実行中よりも小さくなるよう各車輪の制動力がパルス的に調整される。第3制御では、車体スリップ角の過度の増大を抑制するため旋回内輪の制動力の和が旋回外輪の制動力の和よりも小さくなるよう各車輪の制動力がパルス的に調整される。第1〜第3制御での各パルス調整パターンが第1制御開始前に予め決定される。
(もっと読む)
ブレーキ制御装置
【課題】制御弁の作動音を低減する。
【解決手段】ブレーキ制御装置は、車両に付随して設けられている少なくとも1つのセンサを含む検出系と、該車両に付与される制動力を制御するための液圧回路に設けられた電磁制御弁と、検出系からの出力を受信可能に検出系と接続され、要求される制御応答性で電磁制御弁を開閉することが保証される第1の電流プロファイルに従って制御電流を与えて電磁制御弁を開閉する制御部と、を備える。制御部は、検出系からの出力に基づいて電磁制御弁の制御応答性の低下が許容されるか否かを判定し、制御応答性の低下が許容されると判定した場合に、第1の電流プロファイルよりも電磁制御弁の作動音を低減するよう調整された第2の電流プロファイルに従って電磁制御弁に制御電流を与える。
(もっと読む)
ハイブリッド車両の駆動制御装置およびそれを搭載するハイブリッド車両
【課題】機械式オイルポンプおよび電動オイルポンプを備えるハイブリッド車両において、電動オイルポンプの連続動作が限界を超えることによる故障を防止する。
【解決手段】電動オイルポンプの連続動作が所定レベルを超えてEOP連続動作不可が予備判定された場合(S110)には、機械式オイルポンプ起動のためにエンジン起動が要求される(S120)。それでもエンジンが起動されず、連続動作が限界レベルに達してEOP連続動作不可が本判定された場合(S150)には、電動オイルポンプ停止により油圧供給が停止されても車両走行を再開可能とするための車両条件を確保可能するための処理とともに、電動オイルポンプが停止される(S160)。この際に、車両停止(車速=0)を条件に、シフトポジション選択をPポジションに自動的に切換えて、その旨を運転者へ警告する。
(もっと読む)
路面摩擦係数推定装置
【課題】差動制限機構付きの差動装置を備えた車両において、左右夫々の駆動輪がスリップしていると否とに拘わらず路面摩擦係数を推定すること。
【解決手段】差動制限機構付き差動装置20を備えた車両の路面摩擦係数推定装置(電子制御装置)であって、差動制限機構付き差動装置20への入力トルクを推定する差動装置入力トルク推定手段と、差動制限機構付き差動装置20への入力トルク及び同一車軸上の左右夫々の駆動輪(後輪WRL,WRR)の角速度に応じた当該各駆動輪への入力トルクを推定する駆動輪入力トルク推定手段と、駆動輪への入力トルク及び当該駆動輪の慣性トルクに基づいて当該駆動輪の車輪駆動力を推定する車輪駆動力推定手段と、駆動輪の車輪駆動力及び当該駆動輪の車輪接地荷重に基づいて当該駆動輪が接地している路面の路面摩擦係数を推定する路面摩擦係数推定手段と、を備えること。
(もっと読む)
車両用スリップ抑制制御装置
【課題】車輪の路面に対するスリップの判定精度を向上させる。
【解決手段】前後の車輪の回転数の差に対応する値である監視値Mが第1スリップしきい値M1を超えると判定されると、後輪3の駆動力を減少させる初期トラクション制御を開始し、継続トラクション制御では、監視値Mが第1スリップしきい値M1未満の値である第2スリップしきい値M2を超えると判定されると、後輪3の駆動力を減少させると共に、監視値Mが第2スリップしきい値M1未満の値であるグリップしきい値未満であると判定されると、後輪2の駆動力を増加させる。
(もっと読む)
車両制御装置
【課題】運転者が適切な位置に車両を駐車させることができなくなったり、車両制御に対し運転者が煩わしさを感じたりすることを防止する。
【解決手段】制御部4が、車両1よりも障害物側に設定された目標停止位置まで後退して停止する後退制御処理を、車両1から障害物までの距離が最終目標停止距離以下となるまで繰り返し実行することにより、障害物に対し車両1を段階的に後退させる。これにより、従来の車両制御装置のように、運転者が適切な位置に車両を駐車させることができなくなったり、車両制御に対し運転者が煩わしさを感じたりすることを防止できる。
(もっと読む)
車両制御装置
【課題】走行シーンに合わせた適切な車両制御を行う。
【解決手段】車両1が後退動作中である場合、制御部4が、車両1の進行方向と接近車両が走行している道路の延在方向とがなす角度に応じて制動制御作動距離を設定する。これにより、車両1後方に接近車両が通過可能なスペースがなく、運転者が後退操作を早く終了させることを望んでいる可能性が高いシーンでは遅いタイミングで制動制御が行われるようになるので、制動制御に対して運転者が感じる煩わしさや違和感を低減させることができる。
(もっと読む)
車両制御装置
【課題】走行シーンに合わせた適切な車両制御を行う。
【解決手段】車両1が走行している道路の走行優先度よりも高い走行優先度を有する道路を走行している接近車両(優先接近車両)が存在する場合、制御部4が、車両1が停止した場合に優先接近車両が通過可能であるか否かを判定する。そして優先接近車両が通過可能であるとと判定した場合、制御部4は、報知・制動制御が効果的であると判断して報知・制動制御を実行し、逆に優先接近車両が通過不可能であると判定した場合には、報知・制動制御が効果的でないと判断して報知・制動制御を実行しない。これにより、報知・制動を有効的に実行させることが可能となり、結果として、報知・制動制御に対して運転者が煩わしさや違和感を感じることを抑制できる。
(もっと読む)
車両用スリップ抑制制御装置
【課題】トラクション制御機能を備えた車両のドライバビリティを向上させる。
【解決手段】車両の前後の車輪の回転数の差に対応する値である監視値Mを検出するための検出手段と、前記検出手段により検出された監視値Mとしきい値との関係を判定するしきい値判定部46と、しきい値判定部46により監視値Mが第1スリップしきい値M1を超えていると判定されると、駆動輪の駆動力を減少させるトラクション制御を実行開始するトラクション制御部47と、を備え、しきい値判定部46は、監視値Mが第1スリップしきい値M1を超えてから第1スリップしきい値M1未満となるまでの戻り時間tをカウントし、トラクション制御部47は、戻り時間tに基づいてトラクション制御の終了判定を行う。
(もっと読む)
車両制御装置
【課題】検知された障害物の特性に合わせた適切な車両制御を行う。
【解決手段】制御部4が、障害物が移動物であるのか停止物であるのか、及び車両や壁であるのか人や軽車両であるのかに基づいて目標停止距離を変更する。すなわち制御部4は、障害物が人や軽車両である(車両や壁でない)場合には車両や壁である場合と比較して、目標停止距離Dを大きくすることにより制動力を発生させる時点での障害物からの距離を大きく(即ち制動力の発生タイミングを早く)する。これにより、検知された障害物の特性に合わせた適切な車両制御を行うことができる。
(もっと読む)
自動車のアシスト式発進システムの動作状態を診断する方法およびシステム
制御式駐車ブレーキを装備する自動車のアシスト式発進システムの動作状態を診断する方法であって、車両情報の少なくとも1つの項目を計算するステップと、前記車両情報に関連づけられた有効性情報の少なくとも1つの項目が生成される有効性ステップとを含む。本方法は、駐車ブレーキをはずすためのコマンドの間に車両情報および関連有効性情報を不揮発性メモリに記録するステップと、診断情報の少なくとも1つの項目が、記録された情報の有効性の検証に基づいて作成される診断ステップとを含む。 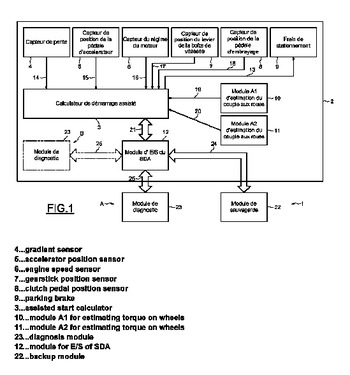 (もっと読む)
(もっと読む)
車両の誤発進防止装置
【課題】車両の発進時および車両の発進直後の少なく一方において、運転者が車両を動かそうとする意志の方向と異なる方向に車両が動こうとしたときに、車両の動きを抑制する。
【解決手段】制御部2は、レンジ検出部3からの運転者が選択した選択レンジの検出信号および運転者状態検出部5からの運転者状態検出信号に基づいて、運転者の選択したレンジの車両の移動方向が運転者の車両を移動させようとする意志の方向と異なると判断したときは、車両抑制手段11を作動させて車両の動きを抑制する。
(もっと読む)
車両用制駆動力制御装置
【課題】 ブレーキ制御に対する駆動源のブレーキトルクの影響を効果的に抑制できる車両用制駆動力制御装置を提供する。
【解決手段】 エンジン39の出力により駆動する左右前輪FL,FRと、車両の状態に応じて車輪に作用する制動力を制御するHU31と、HU31をコントロールするブレーキCU32と、を備え、少なくともエンジン39に対してHU31が制動力を与えているときはエンジン39のブレーキトルクを低減させる。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速することができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、自動変速と手動変速とを設定するための変速設定部における設定内容を示す情報を取得し、前記変速設定部にて手動変速が設定されている場合には、前記所定区間の開始地点に到達する前に、当該加速変速比を示す案内を行う。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速させるための制御を実施する状態と実施しない状態とを利用者の意図通りに柔軟に切り替えることができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、自動制御と手動制御とを設定するための制御設定部における設定が手動制御から自動制御に切り替えられたことを判別し、前記設定が前記手動制御から前記自動制御に切り替えられた場合に、前記所定区間の開始地点に到達する前に前記自車両の車速を前記目標車速まで減速させるとともに、前記自車両の変速比を前記加速変速比に設定させる。
(もっと読む)
201 - 220 / 375
[ Back to top ]