
Fターム[3D246HA25]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 変速機 (375)
Fターム[3D246HA25]に分類される特許
141 - 160 / 375
電子コントロールされる駐車・ブレーキ・システム
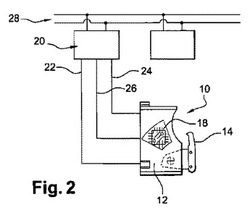
本発明は、乗り物のための駐車・ブレーキ・システムに関し、前記駐車・ブレーキ・システムは、駐車・ブレーキECU(20)を通じて電子コントロールされ、前記乗り物のユーザが前記駐車・ブレーキの付勢の程度をコントロールすることが可能な駐車・ブレーキ入力デバイス(10)から受信された信号に従って比例ブレーキング効果を達成し、前記駐車・ブレーキ入力デバイス(10)が、前記ユーザが、第1の位置と第2の位置の間においてベース(12)に関して変位させて、前記駐車・ブレーキの付勢の程度をコントロールすることが可能な操作部材(14)と、前記第1の位置と前記第2の位置の間における前記ベース(12)に関する前記操作部材(14)の瞬時位置を決定する少なくとも1つのセンサ(16)と、前記ユーザによって要求される前記駐車・ブレーキの付勢の程度を示すデジタル信号を生成するため、およびこのデジタル信号を少なくとも前記駐車・ブレーキECU(20)に伝達(19,22)するためのコントローラ回路(18)とを包含する。 (もっと読む)
ブレーキ液圧制御装置

【課題】簡単な構成により、リニアソレノイドバルブの自励振動による作動音の発生を低減するブレーキ液圧制御装置の提供。
【解決手段】マスタシリンダ12とホイルシリンダWC1、WC2との間にカット弁41、42を設け、正常作動時に、これらによりマスタシリンダ12とホイルシリンダWC1、WC2との間を遮断し、液圧ポンプ32によって、マスタシリンダリザーバ11内のブレーキ液を吸引し、増圧電磁弁43〜46を介してホイルシリンダWC1〜WC4に供給し、減圧電磁弁47〜50を介して、ホイルシリンダWC1〜WC4内のブレーキ液圧をリザーバ11へと戻し、ホイルシリンダWC1〜WC4内のブレーキ液圧を制御するブレーキ液圧制御装置において、減圧電磁弁47〜50とリザーバ11を接続するリリーフ路65〜68または還流路69に、各減圧電磁弁47〜50間で圧力の脈動の伝播を低減する脈動伝播低減手段を設けた。
(もっと読む)
ハイブリッド車両
【課題】故障発生時に速やかに退避走行をさせることができるハイブリッド車両を提供する。
【解決手段】ハイブリッド車両20は、車輪と、車輪を固定するロック機構36と、モータMG2と、エンジン22と、モータMG2およびエンジン22からのトルクを車輪の駆動軸に伝達する動力分割機構30と、モータMG2およびエンジン22を制御するとともに動力分割機構30の分配比を可変に制御する制御ユニット70とを備える。制御ユニット70は、ロック機構36が非作動状態においてモータMG2に異常が発生した場合であって、車速が所定値より大きいときには、モータMG2を非駆動状態としエンジン22からのトルクを車輪に伝達するように動力分割機構30を制御する。
(もっと読む)
作業車両の制御装置
【課題】作業を容易に開始することができる作業車両の制御装置を提供する。
【解決手段】走行ペダルが非操作(PT≦PT1)で回転数Nが所定値N1以下の状態が所定時間継続されると、ブレーキロックと同時にラムシリンダをロックするようにしたので、煩雑なスイッチ操作をすることなくラムシリンダをロックすることができ、作業を容易に開始することができる。
(もっと読む)
車両の速度制御装置
【課題】簡素化された道路データベースを用いて、車両前方にあるカーブを通過する際に運転者に与える違和感が小さい減速制御が達成できる車両の速度制御装置の提供。
【解決手段】道路データベースにて、道路のカーブ内における屈曲度一定区間Cr#を定義するため、屈曲度一定区間Cr#の端点位置である第1位置Px#、及び、屈曲度一定区間Cr#の一定屈曲度Rm#が予め記憶されている。車両位置Pvhに基づいて、車両前方における車両が走行している道路上に存在する屈曲度一定区間Cr#のうちで車両に対して最も近い位置に存在する基準屈曲度一定区間が決定される。車両の実車速Vxa、基準屈曲度一定区間Cr#の第1位置Px#、及び、基準屈曲度一定区間Cr#の一定屈曲度Rm#に基づいて、運転者による加減速操作がなされない場合においても、車両がカーブを適正に通過するためにカーブ減速制御が実行される。
(もっと読む)
電気駆動式機械の駆動方向を制御するための方法とシステム
本願は、1つの態様において、第一の方向に移動している機械の方向を転換するための方法を開示する。この方法は、機械の方向を第二の方向に転換しようとする意思を示す信号を受信するステップを含む。この方法はまた、機械の速度を示す信号がある閾値より大きいか否かを、少なくとも部分的に電気モータのパラメータに基づいて判断するステップを含む。最後に、この方法は、速度が閾値に到達するまで、アクセルペダルの位置を示す信号に応答して制動トルクを機械の少なくとも1つの走行機構にかけるステップを含む。  (もっと読む)
(もっと読む)
車両の走行安全装置
【課題】交差点を適切に検出して交差点での自車両の所望の走行安全性を確保する。
【解決手段】車両の走行安全装置10は、自車両の前方部に設けられて自車両の左右方向の外界を撮像して得た画像を出力する第1カメラ21および第2カメラ22と、各カメラ21,22から出力された画像データに基づいて、路面上端の線分を平面境界線として抽出する境界線抽出部34と、路面および路面上の構造物が存在しない空の領域を抽出し、空の領域から最も平面境界線に近接する近接点を抽出する近接点抽出部35と、平面境界線と近接点との距離を算出する距離算出部36と、平面境界線と近接点との距離が所定距離以下である場合に、自車両が交差点に直面する地点に位置していると判定する交差点判定部37とを備える。
(もっと読む)
車両の走行安全装置
【課題】自車両と他車両との衝突可能性の有無を精度良く判定する。
【解決手段】車両の走行安全装置10は、自車両の進路を予測する自車進路予測部31と、自車両の進路と交差する進行方向で自車両に接近するように移動する接近交差車両を検出する交差車両検出部32と、接近交差車両の進行方向に基づいて、接近交差車両の進路を予測する交差車進路予測部33と、自車両の進路と接近交差車両の進路とに基づいて、自車両と接近交差車両との衝突可能性の有無を判定する衝突可能性判定部40と、自車両が位置する地点において該自車両によって認識される接近交差車両の側面長さLBを検出する側面長さ検出部34と、側面長さLBの時間的な変化に基づいて、接近交差車両の進路を補正する交差車進路補正部38とを備え、衝突可能性判定部40は、補正された接近交差車両の進路に基づいて衝突可能性の有無を判定する。
(もっと読む)
車両の走行安全装置
【課題】自車両が進行方向前方の先行車両に衝突する可能性を低減する。
【解決手段】車両の走行安全装置10は、自車両の進路を予測する自車進路予測部31と、自車両の走行路に交差する交差路を走行する交差車両を検出する交差車両検出部32と、交差車両の進路を予測する交差車進路予測部33と、自車両から所定距離以内の進行方向前方に存在する先行車両を検出する先行車両検出部35と、自車両の進路と交差車両の進路とに基づいて自車両と交差車両との衝突可能性の有無を判定し、先行車両の位置と交差車両の進路とに基づいて交差車両と先行車両との衝突可能性の有無を判定する衝突可能性判定部40と、自車両の走行路と交差路との交差点において、自車両と交差車両との衝突可能性が有ると判定された場合、又は、交差車両と先行車両との衝突可能性が有ると判定された場合に、所定の警報または前記回避制御を実行する車両制御部41とを備える。
(もっと読む)
運転支援装置
【課題】ドライバに与える違和感を軽減することができる運転支援装置を提供する。
【解決手段】 運転支援装置1のECU7は、自車両の現在位置と地図データベース13の情報とに基づいて、目標車速設定地点での自車両の目標車速等を演算するパラメータ演算部8と、車速センサ5により検出された車速及び目標車速等に基づいて、自車両の目標減速度を演算すると共に、その目標減速度から減速アシスト制御量の変更回数を決定する目標減速度演算部10と、目標減速度演算部10により求められた目標減速度及び車速センサ5により検出された車速に基づいて、シフト段数及びブレーキ制御量を演算する制駆動配分演算部11と、シフト段数及びブレーキ制御量に応じてシフト及びブレーキを制御する車両制御部12とを有している。目標減速度演算部10は、目標減速度が高いほど減速アシスト制御量の変更回数を少なくする。
(もっと読む)
車両用ブレーキ装置
【課題】電気作動式駐車ブレーキ駆動手段を備える車両用ブレーキ装置において、電気作動式駐車ブレーキ駆動手段を作動させるのに運転者の煩わしい操作を不要としつつ、その作動頻度を低減し、ノイズの発生を抑えるとともに耐久性の向上に寄与する。
【解決手段】運転者のブレーキ操作に対応して液圧発生手段Mから液圧作動式の車輪ブレーキ2B,2Dに出力されるブレーキ液圧を検出するブレーキ液圧センサ15A,15Bを含み、コントローラCは、ブレーキ液圧センサ15A,15Bで検出されるブレーキ液圧が車両の停止状態で基準値を超えるのに応じて電気作動式駐車ブレーキ駆動手段24A,24Bの通電を開始し、且つこの通電開始時の電気作動式駐車ブレーキ駆動手段24A,24Bの作動量の時間変化率が、その作動量が目標作動量に達するときの作動量の時間変化率よりも小さくなるように、該電気作動式駐車ブレーキ駆動手段の通電を制御する。
(もっと読む)
車両の走行制御装置
【課題】ブレーキが不作動状態となった後に、クリープ走行のための駆動力を車両に与えても、ブレーキが不作動状態となった瞬間には、走行路の勾配によって、車両の進行方向とは逆の方向に加速度が発生することがある。
【解決手段】車両が停止状態に保持されている間に、乗員による発進操作が検出された場合には、走行路について取得された勾配に基づいて、該走行路上で車両の移動を抑制する目標駆動力を算出する。目標駆動力による車両の駆動が行われた後に、車両の停止状態の保持を解除するよう制動力を解除する。好ましくは、制動力の解除が終了するまで、目標駆動力による駆動状態を維持する。制動力の解除が終了したならば、駆動力を増加させて車両を発進させる。このような発進制御により、車両が進行方向とは逆方向に一時的に移動するのが防止され、スムーズな発進を実現することができる。
(もっと読む)
車両駆動システムの制御装置
【課題】エンジンと第1及び第2のMG(モータジェネレータ)を搭載したハイブリッド車において、第1のMG用のインバータの異常が発生して退避走行モード(第2のMGの動力で走行するモード)に移行したときに、二次故障の発生を防止できるようにする。
【解決手段】第1のMG12用のインバータ22の異常が発生して退避走行モードに移行したときに、遊星ギヤ機構16のピニオンギヤの回転速度が制限値を越えないようにエンジン回転速度を制御する過回転防止制御を実行する。この過回転防止制御により、車輪14側に連結されたリングギヤとエンジン11側に連結されたキャリアとの回転速度差を許容範囲内に維持して、ピニオンギヤの回転速度を制限値以下に維持する。これにより、第1のMG12用のインバータ22の異常が発生して退避走行モードに移行したときに、ピニオンギヤが焼き付いて遊星ギヤ機構16が故障する二次故障の発生を防止する。
(もっと読む)
車両の走行安全装置
【課題】運転者が安全装置の作動に煩わしさを感じてしまうことを防止しつつ、適切なタイミングで安全装置を作動させる。
【解決手段】車両の走行安全装置10は、所定の接触判定条件に基づき自車両と物体との接触に係る判定を行なう接触判定部24と、接触判定部24の判定結果に応じて接触回避の支援動作を作動させる車両制御部25と、物体検知部21により検知された物体の形状に基づき、自車両の走行路に接続される接続路の状態を判定する接続路判定部22と、自車両の走行路と接続路との接続部付近の見通しの良否を判定する見通し判定部23とを備え、接触判定部24は、接続路の幅が所定閾値以下であって、かつ、接続路の手前位置に検知された路側物により接続部付近の見通しが悪いと判定された場合に、接触回避の支援動作が作動し易くなるようにして接触判定条件を変更する。
(もっと読む)
車両制御装置
【課題】誤操作によってアクセルペダルが戻された場合であってもスムーズな発進を可能とする車両制御装置を提供する。
【解決手段】電動パーキングブレーキ装置の解除条件が成立しているか否かを判定する解除条件判定手段と、車両が停止している路面の傾斜を検出する傾斜検出手段と、前記路面の傾斜角度に応じた推定走行抵抗を算出する推定抵抗算出手段と、車両の駆動力を算出する駆動力算出手段と、アクセルペダルからの入力に基づいてエンジンの出力を制御するエンジン出力制御手段とを備える車両制御装置であって、エンジン出力制御手段は、解除条件判定手段により電動パーキングブレーキの解除条件成立が判定されかつ駆動力が推定走行抵抗以上となった後に、アクセルペダルからの入力に関わらずエンジンの回転数が所定の下限エンジン回転数以上となるようにエンジンの出力をフィードバック制御する構成とする。
(もっと読む)
車両制御装置
【課題】車両の停車時において、エンジンから発生する熱量を増大させることが可能な車両制御装置を提供する。
【解決手段】エンジンと、エンジンから入力された駆動力を変速して出力可能な変速機と、エンジンの出力軸と変速機の入力軸とを係合可能なクラッチと、を備えた車両を制御可能な車両制御装置において、エンジン負荷を検出可能なエンジン負荷検出手段と、車両の停車時において、検出されたエンジン負荷が目標エンジン負荷となるように、クラッチの係合状態を制御可能なクラッチ制御部と、を備えた。
(もっと読む)
車両用勾配推定装置および車両用走行制御装置
【課題】走行路の路面勾配の推定精度を向上させ、路面勾配の推定結果に応じて適切な走行制御を行なう。
【解決手段】車両用勾配推定装置10aは、車速を検出する車速センサ21と、車速センサ21により検出された車速に基づいて車両の車体加速度を算出する車体加速度算出部31と、エンジン負荷減速度およびクリープトルクによる加速度などからなる加速度補正量を算出する加速度補正量算出部32と、車体加速度を加速度補正量により補正する加速度補正部33と、ブレーキ液圧を検出するブレーキ液圧センサ23と、車速が車両のほぼ停止状態を示す所定値以下となった場合に、加速度補正部33により算出された加速度(つまり、ブレーキの作動に起因した減速度)とブレーキ液圧との比に基づいて走行路の勾配を推定する第1勾配推定部36とを備えて構成される。
(もっと読む)
車両の運動制御装置
【課題】
運転者への違和感を抑制できる予備制御により、ブレーキアクチュエータの応答性を補償し、確実な車両安定性制御を実行できる車両の運動制御装置を提供する。
【解決手段】
車両の操舵角速度を取得する操舵角速度取得手段と、車両のヨー角加速度を取得するヨー角加速度取得手段とを備え、操舵角速度dSaの大きさが第1所定値より大きく、且つ、ヨー角加速度の大きさが第2所定値よりも大きいときに、車輪に制動トルクの付与を行う。
(もっと読む)
車両の運動制御装置
【課題】
複数の状態量間の位相差を補償し、車両のヨーイング運動、及び/又は、ローリング運動における安定性を維持し得る車両の運動制御装置を提供する。
【解決手段】
車両の操舵角速度を取得する操舵角速度取得手段と、操舵角速度に基づいて最大操舵角速度を演算する最大操舵角速度演算手段と、最大操舵角速度に基づいて基準旋回状態量を決定する決定手段と、車両の実旋回状態量を取得する実旋回状態量取得手段と、基準旋回状態量、及び、実旋回状態量に基づいて制動トルクを制御する制御手段とを備える。制御手段は、実横加速度が基準横加速度を超えたときに、車輪への制動トルク付与を行う。
(もっと読む)
車両の運動制御装置
【課題】
運転者への違和感を抑制できる予備制御により、ブレーキアクチュエータの応答性を補償し、確実な車両安定性制御を実行できる車両の運動制御装置を提供する。
【解決手段】
実際の旋回状態量に基づいて第1状態量を演算し、この第1状態量に基づいて車両のオーバステア傾向を識別し、オーバステア傾向を抑制する車両安定性制御を実行する。さらに、車両の実旋回状態量に基づいて第1状態量とは異なる第2状態量を演算し、この第2状態量に基づいて車両のオーバステア傾向を識別し、車両安定性制御の応答性を補償する予備制御を行う。第2状態量は、第1状態量に比較して、相対的に速い車両のヨーイング運動を識別する。
(もっと読む)
141 - 160 / 375
[ Back to top ]