
Fターム[3D246HA25]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 変速機 (375)
Fターム[3D246HA25]に分類される特許
61 - 80 / 375
電動車両の制御装置
【課題】回生制御中において変速制御中または変速制御終了時にブレーキ踏み込み操作があっても、スリップ締結に伴う変速ショックの発生を防止することができる電動車両の制御装置を提供する。
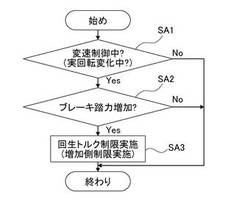
【解決手段】統合コントローラは、モータ/ジェネレータの回生制御中において自動変速機が変速制御中であるか否かを判断する(ステップSA1)。ステップSA1の判断結果がYESの場合にはブレーキ踏力が増加しているか否か、つまり、ブレーキ踏み込み操作があるか否かを判断する(ステップSA2)。ステップSA2の判断結果がYES、つまり、ブレーキ踏み込み操作があると判断した場合には、モータ/ジェネレータの回生トルクの増加を制限してブレーキ制動を行う(ステップSA3)。具体的には、各輪のブレーキユニット(メカブレーキ)を駆動して、各輪の機械制動を行う。
(もっと読む)
車両の制動制御装置

【課題】 回生協調制御中にニュートラルレンジが選択された際のショックを抑制できる車両の制動制御装置を提供する。
【解決手段】 モータジェネレータMGおよび左右後輪RL,RR間に自動変速機ATを介在させ、車輪に摩擦制動トルクを付与するブレーキユニットBUと、モータジェネレータMGによる回生制動トルクと摩擦制動トルクとの和が車両の要求制動トルクとなるように回生制動トルクおよび摩擦制動トルクを制御する統合コントローラ10を備えた車両の制動制御装置において、統合コントローラ10は、自動変速機ATのマニュアルバルブからの油圧抜けが検出された場合、当該油圧抜けの速度に応じて回生制動トルクを低下させる。
(もっと読む)
車両用制御装置
【課題】アイドルストップ制御が行われるマニュアル車において、ドライバに発車意思が無いにもかかわらずエンジン10の再始動処理が行われる状況下、クラッチ装置30の操作状態がクラッチミート状態にされることで、車両が意図せぬタイミングで動き出すおそれがあること。
【解決手段】再始動条件が成立したと判断された場合、ブレーキ油圧を上昇させるべくブレーキアクチュエータ48を通電操作するブレーキ強制加圧処理を開始し、油圧センサ50によって検出されるブレーキ油圧が規定圧以上になると判断されるまでエンジン10の再始動処理を禁止する。そしてその後、ドライバによってアクセルペダル58の踏み込み操作がなされると判断された場合、ブレーキ強制加圧処理を停止させて車輪に制動力が付与されないようにする。
(もっと読む)
ブレーキ制御装置
【課題】左右のブレーキ装置のブレーキドラムとブレーキシューとのクリアランスが異なる場合にもブレーキ作動時に車両を安定させるブレーキ制御装置を構成する。
【解決手段】直進状態で運転者によるブレーキ操作により停車した際のヨーレートからクリアランス左右差取得手段34が左右のブレーキ装置のクリアランスの左右差に相当するクリアランス値CLEを取得し、記憶手段35が記憶する。次に、閾値設定手段36がクリアランス値CLEからブレーキ装置の自動操作を開始する閾値を設定する。車両を旋回させる場合には旋回安定化制御部31が、旋回外側のブレーキ装置に設定された閾値まで横加速度センサ22の検出信号Gyが達したタイミングでブレーキ装置の自動作動を開始する。
(もっと読む)
車両用制動装置
【課題】失陥時のブレーキ操作部材の無効ストロークを低減可能な車両用制動装置の提供。
【解決手段】シリンダ部311内には、プライマリピストン36が移動可能に設けられており、セカンダリピストン33との間にプライマリ室PCが形成されている。プライマリ室PCは、ABSアクチュエータ5を介してホイルシリンダWC2,WC3に接続されている。プライマリピストン36の後方には、パワー液圧源7からの駆動液圧が入力可能な駆動室DCが形成されている。プライマリ室PCは吸収リザーバ91の貯留室913に接続され、駆動室DCは吸収リザーバ91の背圧室914に接続されている。プライマリ室PCと貯留室913との間には、常閉型のカット弁92が形成されている。液圧ブレーキを開始する場合、ブレーキペダル22の操作量に応じて、パワー液圧源7により駆動液圧を発生させ、駆動室DCと背圧室914とに供給する。
(もっと読む)
液圧ブレーキシステム
【課題】液圧ブレーキシステムの改良を図る。
【解決手段】静圧相当制御中に、移動判定時間内のパルス累積値が移動判定しきい値以上になった場合には、通常時制御が実行される。それにより、ブレーキシリンダ液圧が増加させられ、車両の移動が良好に防止される。このように、パルスの累積値に基づくため、回転速度に基づく場合に比較して、車両のゆっくりした移動の有無を、正確に検出することが可能となる。また、その後、パルス無し状態が停止判定時間以上継続すれば、静圧相当制御が開始されるのであり、静圧相当制御を適切に行うことが可能となる。
(もっと読む)
車両挙動制御装置
【課題】前後駆動力配分制御とブレーキ制御とを協調させて、操舵応答性とトラクション性能とを適切に両立させる。
【解決手段】エンジン駆動力Fdを算出し、該エンジン駆動力Fdに基づいて一次遅れ処理を行って前後軸間の締結トルクCawdを算出してトランスファクラッチ駆動部31に出力する。一方、エンジン駆動力Fdの時間的変化ΔFdに基づいて時間の経過と共に減衰する駆動力の変化に応じた制動力Fdtdを一次進み処理を行って算出し、駆動力の変化に応じた制動力Fdtdを基とするアクセル感応目標ヨーモーメントMdtを算出し、ハンドル角速度を基とする操舵感応目標ヨーモーメントMstを一次進み処理を行って算出し、これらアクセル感応目標ヨーモーメントMdtと操舵感応目標ヨーモーメントMstを基に旋回内側内輪に付加する制動力を算出してブレーキ駆動部32に出力する。
(もっと読む)
電気自動車の制動制御方法
【課題】モータによる回生制動が不可なモータまたはバッテリーの過温時や変速段がN段に操作される場合で回生制動量の急激な減少及び油圧制動装置の油圧応答遅延にて発生する制動力減少を効果的に解消できる電気自動車の制動制御方法を提供する。
【解決手段】本発明の電気自動車の制動制御方法は、回生制動が行われる状態で変速レバーのN段操作を検出する段階と、変速レバーのN段操作を検出した時点からモータの回生制動量を線形的に減少させると同時に、制動量の補償のために油圧制動装置の油圧制動量を増加させる段階と、N段操作の検出時から設定時間が経過すると、変速機のN段変速が行われるようにする段階と、を含む。
(もっと読む)
車両の坂道発進補助装置
【課題】坂道発進補助制御により一旦停止で制動状態に保持した車両を特別な操作を要することなく制動解除してクリープ走行を開始でき、もってクリープ現象の利点を十分に活かすことができる車両の坂道発進補助装置を提供する。
【解決手段】車両の一旦停止時にアイドルストップ制御によりエンジンを停止させると共に(S6)、坂道発進補助制御により車両を制動状態に保持し(S8)、その後に運転者による車両発進の意志表示に基づきアイドルストストップ制御によりエンジンを始動し(S12,14)、それに伴うクラッチ装置の半クラッチ制御の再開によりクリープトルクが増加して制動解除判定値に達すると、車両の制動を解除する(S16,18)。
(もっと読む)
車両の制動力制御装置
【課題】車両挙動を適切に保つ際のブレーキ制御量を最小化してドライバが感じる減速度(失速感)を最小とし、且つ、ブレーキ負荷を低減する。
【解決手段】エンジン駆動力を算出し、エンジン駆動力の時間的な変化量(駆動力の変化量)を算出し、車両に作用する走行抵抗を算出し、これら駆動力の変化量と走行抵抗とに基づいて、走行抵抗により発生する減速度を、ドライバが違和感なく許容できる(失速感として感じない)減速度として用いて、走行抵抗以上で、且つ、駆動力の変化量以下の車輪に付加する制動力(付加制動力)を設定して、この付加制動力を基に、目標ブレーキ液圧を算出してブレーキ駆動部15に出力する。
(もっと読む)
車両の制御装置
【課題】 走行中の車両において惰行による走行時間や走行距離を長く確保できる車両の制御装置を提供すること。
【解決手段】 車両の制御装置は、車両の車速Vが下限側車速V0および上限側車速V1で決定される車速域内にあるとき、車速Vが車速V0以上であればフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させ、車速Vが車速V0を下回ると燃料供給によりエンジンを始動させてクラッチを係合して加速させる(定速フリーラン)。車両を停止させる必要があるときは、車両が停止するまでフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させた後(停止フリーラン)、クラッチを係合してエンジンブレーキおよびブレーキ装置による制動を付与する。これにより、惰行による走行時間や走行距離を長く確保できて燃費を向上させることができる。
(もっと読む)
車両のブレーキ保持力制御装置
【課題】車両が停止している路面の勾配と自動変速機の油圧状態に応じてブレーキ力の保持を開放するタイミングを変更することによって車両の違和感の無いスムーズな発進を可能とする車両のブレーキ力保持制御装置を提供すること。
【解決手段】油圧で駆動される自動変速機4を備え、ブレーキ装置7のマスタシリンダ11とホイールシリンダ12とを連通させる液圧通路13に設けられた電磁弁14によってマスタシリンダ11とホイールシリンダ12との連通を遮断し、ブレーキペダル9の踏み込みが解除された後もブレーキ液圧をホイールシリンダ12に残してブレーキ力を保持することができる車両のブレーキ力保持制御装置において、車両が停止状態にあるときに前記自動変速機4の油圧が予め定められた閾値を超えると、その時点で車両の発進が可能であると判断してブレーキ力の保持を解除するECU(制御手段)3を設ける。
(もっと読む)
車両用制御装置
【課題】実ヨーレートの急変の影響を受けることなく、実横加速度を適正に補正することができる車両用制御装置を提供することを目的とする。
【解決手段】車両用制御装置(制御部20)は、実ヨーレートYsの変化率が所定値以上か否かを判断する急変判定手段209と、舵角センサ92で検出する舵角量に基づいて規範ヨーレートYcを算出する規範ヨーレート演算手段202と、急変判定手段209によって変化率が所定値未満であると判断された場合には、実横加速度Gysを実ヨーレートYsに基づいて補正し、急変判定手段209によって変化率が所定値以上であると判断された場合には、実ヨーレートYsを規範ヨーレートYcに切り替えて実横加速度Gysを補正する補正手段220と、を備えている。
(もっと読む)
惰行制御装置
【課題】低μ路走行時の惰行制御が回避できる惰行制御装置を提供する。
【解決手段】車両が低μ路走行中であることを認識する低μ路走行認識部4と、前記低μ路走行認識部により車両が低μ路走行中であることが認識されているときは惰行制御を禁止する低μ路走行中惰行制御禁止部5とを備える。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】ドライバの運転傾向を考慮して、効率よく回生ブレーキによる電力の回生が行われるように案内を行うことができる、運転支援装置、運転支援方法、及び運転支援プログラムを提供すること。
【解決手段】運転支援装置50は、回生ブレーキにより回生された電力を特定する回生電力特定部51aと、車両から対象地物までの距離に基づくタイミングで、車両の減速を促す旨の案内を行う案内部51bと、回生電力特定部51aにより特定された、案内部51bが案内を行ってから対象地物を通過するまでに行われたブレーキ操作に応じて回生ブレーキにより回生された電力に基づき、案内部51bが案内を行うタイミングを設定する設定部51cとを備え、案内部51bは、設定部51cにて設定されたタイミングで新たな案内を行う。
(もっと読む)
車両運動制御装置
【課題】車両に横運動が発生していない状態においても、ドライバフィーリングよく車両を加減速する車両運動制御装置を提供する。
【解決手段】車両運動制御装置において、自車両前方のカーブ形状を取得するカーブ形状取得手段と、自車両の位置を取得する自車位置取得手段と、そのカーブ形状及びその自車両の位置に基づいて、車両に発生させる前後加速度指令値を演算する車両運動制御演算手段と、を有し、車両運動制御演算手段は、自車両がカーブ前からカーブ進入し、カーブ曲率が一定、もしくは最大になる地点まで走行する際に、複数の異なる負の前後加速度指令値を演算する。
(もっと読む)
車両用制動支援装置及び車両用制動支援方法
【課題】自車両前方の障害物XMに対する運転者の支援を、運転者の意図に応じてより適切に実施することを目的とする。
【解決手段】自車両前方の障害物XMに対する自車両MMのリスクポテンシャルが、予め設定した第1の閾値Th1より高く且つアクセルペダル22が操作されていないと判定すると、自車両MMに制動力を付与する。さらに、自車両前方の障害物XMに対する自車両MMのリスクポテンシャルが、第1の閾値Th1よりもリスクポテンシャルが高い第2の閾値Th2よりリスクポテンシャルが高いと判定すると、アクセルペダル22の操作状態に関わらず自車両MMに制動力を付与する。
(もっと読む)
車両駐車支援制御装置及び車両駐車支援制御方法
【課題】自車両周囲の障害物に対する運転支援をより適切に実施可能な車両駐車支援制御技術を提供する。
【解決手段】自車両周囲の障害物との距離が予め設定した制御開始距離以下となったと判定すると、その制御開始距離以下となった障害物への自車両の接近を防止して運転者の運転を支援する運転支援制御を行う際に、自車両が駐車位置に向けて移動中と判定している場合、上記運転支援制御を抑制する。
(もっと読む)
ハイブリッド車
【課題】内燃機関を始動する際に運転者に違和感を与えるのを抑制する。
【解決手段】停車中にエンジンを始動する停車始動時において、バッテリの出力制限Woutが閾値Wref未満のときには(S120)、停車始動時の車輪(駆動輪39a,39bや従動輪)の固定に要する最低限の制動力である固定用最低限制動力Flomin以上の制動力の油圧ブレーキによる車輪への付与を伴ってエンジンをモータリングして始動する(S110,S160〜S200)。これにより、バッテリの出力制限Woutが大きく制限されている状態での停車始動時において、運転者に違和感を与えるのを車輪のより確実な固定によって抑制することができると共に、モータMG2の電力消費の抑制によってバッテリからの放電電力を低減することができる。
(もっと読む)
車両の駆動力制御装置
【課題】車両の加速時に駆動輪が回転振動するとき又はその虞れがあるときにはトランスミッションの変速比のアップシフト変更を促進することにより、車両の加速時に於ける駆動輪の回転振動を効果的に抑制する。
【解決手段】車両の加速時に(ステップ110)、駆動輪の回転振動を検出したとき(ステップ130)、若しく走行路がまたぎ路であると判定したときには(ステップ160)、駆動輪の回転振動が終息し(ステップ210)若しくはまたぎ路走行が終了するまで(ステップ220)、トランスミッション16の変速段を演算するための目標駆動力Fp_t_futureを漸減し(ステップ190、200)、トランスミッションの変速段のアップシフトを促進する。
(もっと読む)
61 - 80 / 375
[ Back to top ]