
Fターム[3D246HA25]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 変速機 (375)
Fターム[3D246HA25]に分類される特許
21 - 40 / 375
車両用ブレーキ装置
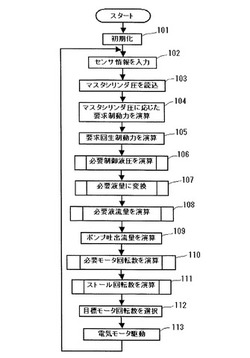
【課題】制御液圧を発生する液圧ポンプを駆動する電気モータの耐久性の向上が可能な車両用ブレーキ装置を提供すること。
【解決手段】ブレーキ操作に応じた制動力を得るための制御液圧の変化量から液圧ポンプ37,47の吐出流量を求め、求めた液圧ポンプ37,47の吐出流量に液圧制御弁31,41が正常に作動可能なリリーフ流量を加算することで、必要最小限の液圧ポンプ37,47の吐出流量を求めている。液圧ポンプ37,47は電気モータMにより駆動されるので、求めた必要最小限の液圧ポンプ37,47の吐出流量は、電気モータMの最低必要回転数に相当する。よって、必要制御液圧に達した後は、電気モータMの回転数を高回転から低回転に低減させることができるので、電気モータMの耐久性を向上させることができる。
(もっと読む)
車両の後退速度規制装置

【課題】車両後退中の車速(後退速度)を運転者によるブレーキ操作/解除に関連付けて適正に規制する。
【解決手段】運転者がブレーキ操作(ブレーキON)を行いながらシフトレンジをRレンジに切り換えた後、最初にブレーキ操作を解除(ブレーキOFF)した時点t1 で、後退速度の制限を開始して所定時間経過後に後退速度の制限を解除する。後退速度の制限中は、制限速度未満の領域では、ブレーキ操作やアクセル操作に応じて後退速度が変化し、制限速度以上の領域では、後退速度が制限速度に制限される。車両を後退させる動力源がエンジンの場合は、後退速度を制限する際に、エンジンの出力を制限せずに、ブレーキ作動制御、自動変速機の変速制御、クラッチのスリップ制御のいずれか1つ又は2つ以上により後退速度を制限する。
(もっと読む)
車両のブレーキ制御装置
【課題】一例として自動二輪車1のような車両の制動時に車輪2,3のロックを防止するように、当該車輪2,3に付与するブレーキ力を調整するABS制御において、それらの車輪2,3のロック傾向を直接的に検出し、より適切なABS制御の介入判定を行えるようにする。
【解決手段】車輪2,3の回転速度である車輪速度Vf,Vrの低下率ΔVf,ΔVrが所定の閾値以上であることを含む、ABS制御の介入条件が成立したか否かを判定する(第1および第2の判定部54,55)。介入条件が成立したと判定すればABS制御を開始する(ABS制御部56)。
(もっと読む)
車両の運動制御装置
【課題】車両がカーブに進入する際において運転者が受ける安心感が考慮されて減速制御が実行される車両の運動制御装置を提供すること。
【解決手段】この装置では、運転者の安心感に影響を与える、カーブの曲率半径、登降坂勾配(上り・下り勾配)、ブラインドカーブ、及び勾配急減部分の4つの観点が考慮されて許容横加速度基準値Gyaが補正されて許容横加速度Gyoが演算・調整される。この調整された許容横加速度とカーブの曲率半径とに基づいてカーブを通過する際における適正車速が決定される。そして、所定の減速制御開始条件が成立すると、運転者の加減速操作の有無にかかわらず、減速制御が開始・実行されて、車速が上記適正車速まで減速される。このように、運転者の安心感が考慮されて許容横加速度(従って、適正車速)が決定されるから、運転者に違和感を与えることなく、減速制御が実行され得る。
(もっと読む)
電動乗物用のAC駆動システム
【課題】実用的な乗物用の駆動システムを提供する。
【解決手段】この駆動システムは、駆動トルクを提供するための交流(AC)モータを含んでいる。ACモータコントローラは、電源電圧信号、スロットルペダル位置信号、ブレーキペダル位置信号、キースイッチ信号、前進/ニュートラル/後退(FNR)信号、および、実用的な乗物が駆動するように設定されているか、牽引されるように設定されているかを示す走行/牽引信号を受信する。ACモータコントローラは、ACモータのためのAC駆動信号を生成し、AC駆動信号は、電源電圧信号、スロットルペダル位置信号、ブレーキペダル位置信号、キースイッチ信号、FNR信号、および走行/牽引信号に基づいている。
(もっと読む)
衝突回避装置
【課題】ユーザーが煩わしさを感じることのないPCS制御を行うことのできる衝突回避装置を提供する。
【解決手段】検出手段と、検出された物体を衝突判断対象物とし、当該衝突判断対象物と自車両とが衝突する可能性を判断する衝突判断手段と、衝突判断対象物と自車両との衝突を回避するための衝突回避制御を行う制御手段と、衝突回避制御を解除する解除手段と、自車両の位置を示す情報および自車両の車両情報の少なくとも一方の情報を取得する車両情報取得手段と、衝突回避制御の態様を変更する変更手段と、解除手段によって衝突回避制御が解除されたときの自車両の位置を示す情報を解除時位置情報として、解除手段によって衝突回避制御が解除されるときの自車両の車両情報を解除時車両情報として車両情報取得手段から少なくとも一方を取得し記憶する記憶手段とを備える。
(もっと読む)
車両用緊急停止装置
【課題】運転者が運転操作を継続できない非常時に、運転者以外の乗員が即座に車両を緊急停止させることができるようにしながら、その緊急停止の指示が誤ってなされた場合には、車両の緊急停止動作を円滑に解除する。
【解決手段】車両用緊急停止装置100は、緊急停止スイッチ102を有し、この緊急停止スイッチ102が操作されたときに車両を緊急停止させる。ただし、このような緊急停止スイッチ102は、誤操作される可能性もあるので、運転者によって操作されるアクセルペダルの動作状態に基づき、車両の運転者が運転操作を行ないうる状態であるか否かを判断し、車両の運転者が運転操作を行いうる状態であると判断された場合には、緊急停止スイッチ102の操作がなされたとしても、その緊急停止スイッチ102の操作に基づくブレーキの作動を停止させる。
(もっと読む)
ブレーキシステム
【課題】回生協調制御における制動力変動や減速度変動を抑制する。
【解決手段】各ブレーキのブレーキキャリパ21a〜dを動作させるマスタ圧発生装置200、ホイール圧発生装置300、回生制動装置18と、これらのアクチュエータ200、300、18を制御するブレーキ制御装置100とを備え、ブレーキ制御装置100は、ブレーキキャリパ21a〜dで出力する摩擦制動力と、回生制動装置18が出力する回生制動力を求める制動力算出部111、各制動力に応じた制動力信号を各アクチュエータ200、300、18に出力する通信制御部112と、を備え、ペダル反力とマスタシリンダを加圧するピストンの変位量とに基づいて総制動力を調整することにより、車速の低下に応じて回生制動から摩擦制動に移行する際に、総制動力が略一定となるようにしたブレーキシステム。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】トルクコンバータで発生する発熱量を抑制するためにダウンシフトを実行するに際して、そのダウンシフトによって運転者に与える違和感を抑制することができる車両用動力伝達装置の制御装置を提供する。
【解決手段】トルクコンバータ34の単位時間当たりの発熱量qが上限値qmax以上、または、トルクコンバータ34の速度比eが下限値emin以下となると、通常ダウンシフトが実施されないタイミングでダウンシフトされ、自動変速機26の変速前後に発生する駆動力段差ΔTによって運転者に違和感を与えることとなるが、ダウンシフトの際に発生する、変速前後の駆動力段差ΔTを抑制する制御が実行されるため、運転者に与える違和感を抑制することができる。
(もっと読む)
車両保持制御装置及び車両保持制御方法
【課題】モータの電力消費量を最小限に抑えることができる車両保持制御装置及び車両保持制御方法の提供。
【解決手段】車両の登坂状態が検出され、かつブレーキペダル17のオフ状態を検出した際に、ブレーキ油圧を保持した後に、徐々に解放する油圧ヒルホールド手段と、走行駆動力を供給可能なフロントモータ4、リヤモータ6と、各モータの駆動力を制御するモータECU11,12とを備えた車両保持制御装置であって、登坂状態の車両1のずり下がりを防止するのに必要な必要車両保持力を路面勾配と車両重量に基づいて導出するエンジンECU13を備え、モータECU11,12は、油圧ヒルホールド手段により徐々に油圧が解放されて減少する車両保持力が、エンジンECU13により導出された必要車両保持力以下になるときに、不足した車両保持力をフロントモータ4やリヤモータ6のトルクで補う。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】車両に加わる荷重に関係なく、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御を適切に開始させることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両の荷重WWを取得し(ステップS142)、開始時間判断基準値KT2を荷重WWが重い場合には荷重WWが軽い場合よりも大きな値に設定する(ステップS144)。そして、ブレーキ用ECUは、車体減速度が第1の減速判定値を超えてからの経過時間が開始時間判断基準値KT2以下であると共に、Gセンサ値が第2の減速判定値を超えたときに、補助制御を開始する。
(もっと読む)
電動パーキングブレーキ装置
【課題】運転者のアクセルペダルの操作を速やかに認識し、スロットルバルブの開き始めにおいて、車両の引きずり現象や発進直後の制動ショックを低減する電動パーキングブレーキ装置を提供する。
【解決手段】アクセルペダル操作量信号APSを用いてスロットルバルブの開き始めのタイミングに電動パーキングブレーキを解除する代わりに、アクセルペダルが踏み込まれていない時刻t1のタイミングでのアクセルペダル操作量信号APSを取得して、基準アクセルペダル操作量信号APS*とし、その後は、アクセルペダル操作量信号APSと基準アクセルペダル操作量信号APS*との比をアクセル操作係数KACとし、アクセル操作係数KACが閾値KAC*以上になったタイミングで電動パーキングブレーキを解除する。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】運転者の加減速操作や運転負荷を低減する。
【解決手段】運転者が加減速操作する一つのレバー100Aが中立位置から操作されたことを検出すると、車両MMに加速度若しくは減速度を付与すると共に、上記レバー100Aを中立位置に付勢して無操作状態では上記レバー100Aを中立位置に保持する保持機構100Bを備える。そして、本発明は、上記レバー100Aが中立位置にあることを検出すると、車両MMを停止可能な減速度GNを車両MMに付与する。
(もっと読む)
自動車
【課題】坂道の発進の際に車両のずり下がりを抑制しつつ、シフトポジションがニュートラルポジションとされたときに運転者が予期するよう車両を動作させて運転者に違和感を与えないようにする。
【解決手段】停車したときや停車中にシフトレバーが操作された際、シフトポジションSPが前進用ポジション(D,B)のときには、前方に上り勾配のときにだけ制動力保持制御を許可し、それ以外のときには制動力保持制御を禁止し、シフトポジションSPが後進用ポジション(R)のときには、前方に下り勾配のときにだけ制動力保持制御を許可し、それ以外のときには制動力保持制御を禁止し、シフトポジションSPがニュートラルポジション(N)のときには、勾配に拘わらずに制動力保持制御の実行を禁止する。
(もっと読む)
車両の制御装置
【課題】 コースト走行時に安定した車両挙動が得られる車両の制御装置を提供すること。
【解決手段】 駆動輪に駆動力と回生制動力とを付与するモータと、各輪に摩擦制動力を発生するブレーキ手段と、従動輪及び駆動輪の車輪速を検出する車輪速検出手段と、運転者に加速意図が無いときは運転者の制動要求に関わらずコースト回生制動力を付与するコースト回生制御手段と、運転者のブレーキ操作時に回生制動力の変化に応じて摩擦制動力を調整する協調回生制動の制御中に、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が第1所定値以上低下したときは、駆動輪の回生制動力を低下しつつ従動輪の摩擦制動力を増加させる協調回生制御手段と、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が前記第1所定値よりも大きな第2所定値以上低下したときは、前記コースト回生制動力を小さくするコースト回生制動力変更手段と、を備えた。
(もっと読む)
プリクラッシュセーフティーシステム
【課題】二次被害の発生を防止することができるプリクラッシュセーフティーシステムを提供する。
【解決手段】自動ブレーキを作動させることにより、車両を前方の障害物と接触して停止、又は車両を前方の障害物の至近距離で停止させるプリクラッシュセーフティーシステムにおいて、ドライバーの降車を検出する降車検出手段と、自動ブレーキの保持開始から所定時間以上が経過していない場合に、前記降車検出手段からの信号に基づき、自動ブレーキを保持継続状態とする制御手段とを備えた。
(もっと読む)
運転支援装置
【課題】自車両を効率的に走行させるような運転支援を実現することができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU7は、自車両周辺の道路状況を認識する道路状況認識部24と、自車両の走行状態を予測する自車状態予測部26と、他車両の走行状態を予測する他車状態予測部27と、他車両に対する自車両のリスクポテンシャルマップを算出するリスクポテンシャルマップ算出部28と、自車両周辺の道路状況と自車両の走行状態と他車両の走行状態とに基づいて自車効率ポテンシャルマップを算出する自車効率ポテンシャルマップ算出部52と、リスクポテンシャルマップと自車効率ポテンシャルマップとに基づいて総合ポテンシャルマップを算出する総合ポテンシャルマップ算出部31と、総合ポテンシャルマップに基づいて操作反力を算出する操作反力算出部32とを有している。
(もっと読む)
走行支援装置
【課題】ドライバーの要求により合致し、ドライバーの装置のシステムへの過信を防止することが可能な走行支援装置を提供する。
【解決手段】走行支援装置10は、車両11後方の障害物Oaを検知するソナー12と、後退時に障害物Oaとの接触を防止するように車両11の走行を制御するPCS ECU20を備える。PCS ECU20は、後退時に障害物Oaとの接触を防止するようにドライバーの操作によらずに車両11の速度の制限及び減速の減速制御又は停止制御を行ない、その後に減速制御等の操作量を小さくする。このため、車両11が障害物Oaに対して減速された後に、ドライバーがさらに障害物Oaに接近したい等の理由で車両11を加速させたい状況に対応することができ、いつまでも車両11が障害物Oaに対して減速させられて、ドライバーがシステムを過信することを防ぐことができる。
(もっと読む)
走行支援装置
【課題】車両の前進時と後退時とで検知対象とすべき障害物に応じた適切な検知が可能な走行支援装置を提供する。
【解決手段】車両11の前方の障害物を検知するレーダ14と後方の障害物を検知するソナー12とを備え、車両の前進時及び後退時にレーダ14及びソナー12により検知された障害物と車両11との接触を防止するように車両11の走行を制御するPCS ECU20を備えるため、前進時及び後退時の両方で障害物と車両11との接触を防止することが可能となる。また、レーダ14は、ソナー12とは異なる種類のセンサであり、ソナー12よりも車両11から長距離に位置する障害物を検知することが可能であるため、後退時の比較的に低速な速度域と、前進時の比較的に高速な速度域とに応じて、検知対象とすべき障害物と車両11との位置関係に応じた適切な検知が可能となる。
(もっと読む)
走行支援装置
【課題】車両の後退時において、障害物と車両との距離が至近距離となった場合でも、より精緻に車両の走行を制御することが可能な走行支援装置を提供する。
【解決手段】走行支援装置10は、車両11後方の障害物Oaを検知するソナー12を有し、後退時に障害物Oaとの接触を防止するように車両11の走行を制御するPCS ECU20を備える。PCS ECU20は、障害物Oaがソナー12により検知不可能な範囲に接近したときは、ソナー12により障害物Oaを検知可能であった位置からの車両11の走行距離に基づいて推定される障害物Oaとの距離に基づいて車両11の走行を制御する。障害物Oaが接近し過ぎてソナー12により検知不可能な範囲に入ってしまい、障害物Oaをロストしてしまった状況でも、障害物Oaとの距離を推定し、推定された距離に基づいて障害物Oaとの接触を防止することができる。
(もっと読む)
21 - 40 / 375
[ Back to top ]