
Fターム[3D246HA65]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車輪状態 (1,921) | 車輪速度 (1,407) | 速度0 (30)
Fターム[3D246HA65]に分類される特許
1 - 20 / 30
車輪回転速度制御装置
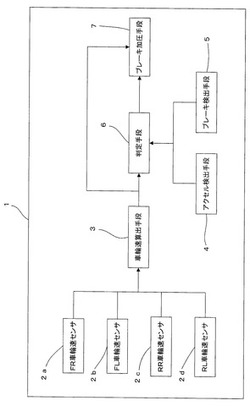
【課題】車両の停車時に発生する車輪回転速度センサからの誤信号を防止する車輪回転速度制御装置を提供する。
【解決手段】4輪の車輪を備える車両の各車輪それぞれの車輪回転速度を検出する車輪回転速度検出手段2a,2b,2c,2dと、各車輪それぞれのブレーキ圧を個別に加圧するブレーキ加圧手段7とを備え、ブレーキ加圧手段7は、車両が停止している状態で、車輪回転速度検出手段2a,2b,2c,2dにより各車輪のいずれかが回転していることが検出された場合に、予め定められた所定時間、車輪のブレーキ圧を加圧する。
(もっと読む)
車両の制駆動力制御装置及び制駆動力制御方法

【課題】段差を通過して間もない位置に車両を停止する必要があっても、急な速度変化が発生することを抑制可能とすることを目的とする。
【解決手段】車両の制動力及び駆動力を制御して、取得した目標位置に車両を誘導または駐車する車両の制駆動力制御する際に、段差を通過する際に生じる目標位置に対する車両の相対速度の変動に応じて駆動力指令値を増大する。但し、上記段差を乗り越えるために、当該段差に接触した車輪の上方への変位である車輪の浮き上がりと判定すると、上記付加駆動力分の指令値が小さくなるように、上記駆動力指令値の上昇を抑制する。そして、駆動力指令値の抑制中に制動指令を制動装置に出力する。
(もっと読む)
車両用制動支援装置
【課題】坂路にて自車両の停止中に自動制動の制動力を解除した際に、自車両の動作が運転者が意図しないものになることを防止する。
【解決手段】車両用衝突回避制動支援装置1は、障害物との接近に関するリスクポテンシャルを算出するリスクポテンシャル演算部31と、走行路の勾配を検出する外乱推定部32と、自車両が停止中に、リスクポテンシャルに基づき自車両に付与した制動力を解除する際のその減少度合いを、リスクポテンシャル及び走行路の勾配に基づいて変更する制動力演算部40とを備える。
(もっと読む)
エンジン自動停止再始動制御装置
【課題】エンジン再始動時の車体の前後方向の振動をより抑制することができるエンジン自動停止再始動制御装置を提供する。
【解決手段】エンジン再始動を行う際に、ショック抑制ブレーキ制御を行い、実車軸トルク変化速度と理想車軸トルク変化速度との間の差である変化速度差に応じた制動トルクを発生させる。これにより、エンジン再始動時に生じる振動トルクを抑制することが可能となり、車体のショックを抑制することが可能となる。
(もっと読む)
車輪速センサの異常検出方法及び車両のスリップ制御方法
【課題】センサ取付位置による誤差や外来ノイズ等の影響を受けず、車輪速センサの異常を検出すること。
【解決手段】左右の駆動輪の車輪速センサによる平均回転速度を検出し、変速機内の回転センサによる車輪速換算値を検出し、平均回転速度と車輪速換算値との差を逐次時間積分して相対角を求める。車輪速センサと回転センサとの各取付部での相対角の許容値を設定し、時間積分で得られた相対角がこの許容値を越えた場合に車輪速センサの異常と判定する。
(もっと読む)
車両の制御方法及び車両の制御装置
【課題】車両の停止時に該車両からの作動音の発生を抑制できる車両の制御方法及び車両の制御装置を提供する。
【解決手段】運転手によるブレーキペダルの操作によって車両が停止する場合、ブレーキ用ECUは、車両が停止する前に、自動変速機の入力クラッチを作動させてエンジンから後輪への動力伝達効率を低減させる(第4のタイミングt24)。その後、運転手によるブレーキペダルの操作によって車両が停止した場合、ブレーキ用ECUは、各リニア電磁弁に対する電流値Islを調整して車両に対する制動力を保持させる(第5のタイミングt25)。
(もっと読む)
ブレーキ制御装置
【課題】回生制動力と液圧制動力とを併用して車輪に制動力を付与するブレーキ制御装置において、燃費性能の向上を図るとともに液圧制動力を確保する。
【解決手段】ブレーキ制御装置は、ブレーキ回生協調制御を実行可能なブレーキ制御装置であって、電動モータの回生制御により回生制動力を発生させる回生ブレーキユニットと、液圧制動力を発生させる液圧ブレーキユニットと、内燃機関の動力を用いて発電する発電部と、電動モータの回生制御により得られる電力と発電部の発電により得られる電力とを蓄えるとともに、液圧ブレーキユニットに電力を供給する電源部と、発電部による発電量を制御する制御部と、を備える。制御部は、電動モータの回生制御により得られる電力が所定のしきい値未満となる場合に、発電部の発電量を、通常時の発電量よりも大きくする。
(もっと読む)
車両のアイドルストップ制御装置
【課題】エンジンの自動停止中において、車両の車輪に対するブレーキ圧を、当該自動停止開始から現時点までの、ブレーキペダルの踏み込みによるブレーキ圧の最大値ないしその近傍の値に保持する場合において、その踏み込み量に関係なく、車両の発進時の挙動を安定させて、車両の乗員に対し常に良好な発進フィーリングを付与できるようにする。
【解決手段】ブレーキペダルの踏み込みの解放により該踏み込みによるブレーキ圧が所定値以下になったとき(時刻t2)に、車輪に対するブレーキ圧を所定圧に低下させるとともに、該低下完了後(時刻t3)に上記車輪に対するブレーキ圧を解放する。
(もっと読む)
車両のアイドルストップ制御装置
【課題】車両が停止している路面に傾斜が存在する状態でのエンジンの自動停止中に、変速レンジが走行レンジからNレンジに設定されたときにおいて、乗員が発進しようとして、誤って先にブレーキペダルの踏み込みを解放したとしても、車両の移動を抑制しながらスムーズな発進を行うことができるようにするとともに、乗員が坂道で意図的にNレンジにして車両を移動させようとする場合にも適切に対応できるようにする。
【解決手段】Nレンジに設定されたときから、ブレーキペダルの踏み込みの解放により該踏み込みによるブレーキ圧が所定値以下になったとき(時刻t12)からの経過期間が、予め設定した設定期間になるまでの間、車両の車輪に対するブレーキ圧を、上記解放に伴って所定圧よりも小さくならないように制御する自動ブレーキ制御手段を備える。
(もっと読む)
車両制御装置
【課題】車両の停止状態において制動力を車輪に作用させる車両制御装置において、エンジンを自動停止させる機会を更に増やす。
【解決手段】車両制御装置は、車両が走行状態であっても、エンジン10の運転中に所定の停止条件が成立した場合にエンジン10を自動停止させるとともに、所定の再始動条件が成立した場合にエンジン10を再始動させる。車両制御装置は、車速センサ35及びECU30により検出される検出車速が0である場合に、運転者のブレーキ操作に基づいて車輪27に作用させられる制動力よりも大きい所定の制動力を、ブレーキアクチュエータ28により車輪27に作用させる。車両の実速度が0となる付近で検出車速が0となる不感帯が存在している。車両制御装置は、エンジン10の自動停止に伴い検出車速が0まで低下した時に、ブレーキアクチュエータ28により所定の制動力よりも小さい制動力を車輪27に作用させるECU30を備えている。
(もっと読む)
車両制御装置
【課題】車両の旋回性を高くすることができるようにする。
【解決手段】ボディ11と、ボディ11に対して回転自在に配設された車輪WLF、WRF、WLB、WRBと、所定の車輪WLB、WRBとボディ11との間に配設され、所定の車輪WLB、WRBにキャンバ角を付与するための車輪駆動部31、32と、車両の操舵を表す操舵指標を検出する操舵指標検出部と、操舵指標に基づいて車両が旋回しているかどうかを判断する旋回判断処理手段と、車両が旋回しているときに、所定の車輪にキャンバ角を付与するキャンバ角付与処理手段とを有する。車両が旋回しているときに、所定の車輪にキャンバ角が付与されるので、横力を発生させ、コーナリングフォースを発生させることができ、旋回性を高くすることができる。
(もっと読む)
制動力保持制御装置
【課題】発進補助制御を行う際に、ドライバに板感を与えることを防止してブレーキフィーリングの向上を図る。
【解決手段】発進補助制御処理において、発進補助制御の開始条件を2つに分け、車両停止時よりもブレーキペダルBPが踏み込まれてマスタシリンダ圧が上昇したときに発進補助制御の実行許可を出し、その後、ブレーキペダルBPが戻されたことが確認されると発進補助制御の実行開始する。このように、ブレーキペダルBPが戻されたときに初めて発進補助制御の実行開始としているため、発進補助制御の実行により電磁開閉弁SMCFおよび電磁開閉弁SRECが遮断状態にされたとしても、その後にブレーキペダルBPが踏み込まれることがない。このため、ブレーキペダルBPを踏み込んだときに発進補助制御を実行する際のような板感をドライバに与えないようにすることができる。
(もっと読む)
車両の制御装置及びその制御方法
【課題】エンジンを自動停止自動始動後にヒルホールド制御を行うアイドルストップ制御において、ホイールブレーキ作動圧の保持解除を最適に行うことで操作応答性に優れた車両の制御装置及び車両の制御方法を提供することである。
【解決手段】エンジン自動停止後、S13でエンジン始動条件が成立したか否か判定され、Yesの場合、エンジン1に始動指令を送りエンジンを始動させると共に、タービン回転数が600rpmを越えて300rpmを下回るまでヒルホールド制御部がブレーキ液圧を保持する。タービン回転数が300rpmを下回ると、ブレーキ液圧Pが減圧される(S17)。
(もっと読む)
制動力保持制御装置
【課題】発進補助制御を実行させる意思が無いにもかかわらず誤って発進補助制御が実行されることを防止する。
【解決手段】発進補助制御を実行する際に、ブレーキペダルが速く踏み込まれる速踏み状態であるか否かを判定し、速踏み状態のときに発進補助制御の実行許可条件を満たせば発進補助制御の実行許可の判定を行う。これにより、ドライバが発進補助制御を実行しようとする意思が無いにもかかわらず発進補助制御を実行してしまうことを防止できる。したがって、発進補助制御を実行させる意思が無いにもかかわらず誤って発進補助制御が実行されることを防止できる。
(もっと読む)
パーキングブレーキシステム
【課題】 運転者に加わる負担を軽減し、運転操作性の向上を図ったパーキングブレーキシステムを提供する。
【解決手段】 スロットルセンサ13から検出信号が出力されたか否かを判定し(S1)、検出信号が出力されたと判定されたときは(YES)、アクチュエータ11をOFFして、パーキングブレーキ装置12をOFFする(S2)。S1において、スロットルセンサ13から検出信号が出力されないと判定されたときは(NO)、S3に進み、位置センサ14から検出信号がONであれば、S2に進んで、パーキングブレーキ装置12をOFFする。検出信号がOFF、すなわち、ゴルフカートの車輪の回転が停止したら、S4に進み、アクチュエータ11をONして、パーキングブレーキ装置12をONして、ブレーキペダルのアームを引っ張っる結果、車輪が制動され、パーキングブレーキ装置を手動で使用する必要がなく、運転者の疲労など運転者に加わる負担を軽減でき、運転操作性の向上を図れる。
(もっと読む)
車両の制動制御装置
【課題】 制動力保持制御が必要な状況でない場合に制動力の保持制御が開始されることを抑制する車両の制動制御装置を提供すること。
【解決手段】 本制御装置のCPUは、取得された車両10の車速が所定車速以下になった場合、その車両停止時のブレーキ液圧P1を取得する。更に、CPUはブレーキ液圧P1取得後のブレーキ液圧P2を取得する。ブレーキ液圧P2がブレーキ液圧P1に追加所定値Pthを加えた値よりも大きい場合、車両の制動力を保持する制動力保持制御を開始する。その際、CPUは車両の勾配を取得して、取得した勾配が予め定められた勾配以下である場合、制動力保持制御を行わない。即ち、制動力保持制御が必要な状況でない場合、制動力保持制御が誤って開始することを抑制することができる。
(もっと読む)
車両用制御装置及び車両
【課題】運転者の意図をより的確に反映して、作動力保持制御を行うことが可能な車両用制御技術を提供する。
【解決手段】車両1は、ホイールシリンダ16に液圧等の作動力を受けて作動して車輪9の回転を制動可能なブレーキ機構である摩擦ブレーキ11を備え、ブレーキペダル20の踏力をマスタシリンダ圧に変換するマスタシリンダ26を有している。ECU100は、当該ホイールシリンダ16に伝達される液圧等の作動力を保持する作動力保持制御を行うことが可能なものである。さらに、ECU100は、車両が停止している路面の上り勾配である路面勾配を推定する機能と、車両停止中において、マスタシリンダ圧が、予め設定された制御開始圧を上回った場合に、作動力保持制御を開始する機能と、推定された路面勾配が大きくなるに従って前記制御開始圧が小さくなるよう設定する機能とを有している。
(もっと読む)
車両用ブレーキ力保持制御装置
【課題】適切な保持圧で車両の停止状態を維持する。
【解決手段】車両用ブレーキ圧保持制御装置は、車両の前後方向の加速度を検出する加速度センサ93の出力値を取得する加速度取得手段22と、加速度センサ93の出力値の、車両の前方に相当する向きへの変化を制限する第1のフィルタ23Aと、車両のギア位置が前進ギアか否かを判定するギア位置判定手段24と、ギア位置判定手段24で判定されたギア位置が前進ギアである場合には、第1のフィルタ23Aで処理され出力された第1の加速度フィルタ値Afを保持圧PHに換算する換算手段25と、保持圧PHに基づきブレーキ圧の保持を実行する保持実行手段29とを備える。
(もっと読む)
車両用制動システム及びこのような制動システム用の制動ペダル装置
本発明は、車両10特に商用車両用制動システム16であって、車両を制動する常用制動機能を与える常用制動装置と、常用制動装置とは無関係に駐車制動機能を与える駐車制動装置92とを有するものに関する。故障の場合制動システムの機能態様を改善するため、両方の制動装置のうち一方の部分的又は完全な故障の場合、車両がそれぞれ他方の制動装置により自動的に制動可能特に固定可能である。
本発明は更にこのような制動システム用の制動ペダル装置に関する。
(もっと読む)
電動ブレーキ装置
【課題】電力消費を抑制できる電動ブレーキ装置を提供する。
【解決手段】駐車ブレーキが作動して押付力を保持した後、IGN SW34がオフされて、制御ECU4(電力供給部)への電源接続が遮断された状態で、車輪速センサ検出値に変化が生じたときに、駐車ブレーキリクランプ動作のために制御ECU4(電力供給部)への電源接続を開始する。このため、駐車ブレーキリクランプ動作を行う上で、停車中であるにも拘わらずモータ及びPKB駆動機構に対する電力供給部への電力供給が必要とされる従来技術に比して、電力消費を抑制できる。
(もっと読む)
1 - 20 / 30
[ Back to top ]