
Fターム[3D246HA81]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | ヨーレート (774)
Fターム[3D246HA81]に分類される特許
201 - 220 / 774
車両用運転支援装置
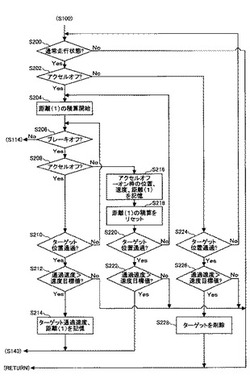
【課題】運転者の運転感覚に合致した最適な自動減速制御を行なうことが可能な車両用運転支援装置を提供すること。
【解決手段】車両が特定の位置を走行する際に自動減速制御を行なう制御手段を備える車両用運転支援装置であって、運転者のアクセル操作を検出するアクセル操作検出手段と、前記運転者のブレーキ操作を検出するブレーキ操作検出手段と、を備え、前記制御手段は、前記アクセル操作検出手段及び前記ブレーキ操作検出手段の検出結果を参照して前記運転者が一連の特定操作を行なったと判定した場合に、該一連の特定操作に含まれる操作の行なわれたタイミングを学習し、該学習したタイミングに基づいて、前記自動減速制御の制御区間を決定することを特徴とする、車両用運転支援装置。
(もっと読む)
車両用ブレーキ液圧制御装置

【課題】悪路などでのアンチロックブレーキ制御の誤作動防止と、旋回中の運転フィーリングの向上を両立させる。
【解決手段】各車輪のスリップ量の大小に関する計算値に基づき車輪ブレーキの液圧を制御する車両用ブレーキ液圧制御装置である。この装置は、前記計算値を、スリップ量が小さくなる方に換算して算出する第1の演算部(第1スリップ率演算部21)と、換算を行わずに算出する第2の演算部(第2スリップ率演算部22)と、第1の演算部が算出した計算値が第1の閾値を超えない場合においても、ヨーレイト偏差ΔYがヨーレイト偏差閾値を超え、かつ、第2の演算部が算出した計算値が第2の閾値を超えた場合には車輪ブレーキの減圧制御を実行する圧力制御部(圧力制御判定部24、弁駆動部25)を有する。
(もっと読む)
道路形状検出装置、走行制御装置、及び道路形状検出方法
【課題】認識しているカーブ数のハンチングを抑制する。
【解決手段】各カーブ区間の入口補間点について、演算周期における前回の演算結果と比較し、カーブ区間数が変動しているか否かを判定し(ステップS5)、カーブ区間数が変動していたら、前回のカーブ情報と自車両の移動量とに基づいて、今回のカーブ情報を補正する(ステップS6)。先ず、カーブ区間が減少しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ増加させる。一方、カーブ区間が増加しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ減少させる。すなわち、今回のカーブ情報を、前回の配列に戻す補正を行うことで、前回のカーブ区間数を保持する(ステップS62)。
(もっと読む)
車両運動制御システム
【課題】単一の前輪とその前輪より後方側に配設された左輪および右輪とを有する車両に搭載されて車両の運動を制御するシステムであって、車両の斜め前方への転倒を防止することが可能な車両運動制御システムを提供する。
【解決手段】制動かつ旋回状態にある場合において車両が転倒する可能性が高くなった場合に、車両がさらに旋回内側を向くように車両の運動を制御する。車両を旋回内側に向けることで、制動旋回によって車体に作用する力の向きを、車両が転倒しにくい向き、例えば、車幅方向に平行な向き等に変更することが可能となる。したがって、本車両運動制御システムによれば、車両の転倒を防止することが可能となる。
(もっと読む)
車両の旋回挙動制御装置
【課題】旋回走行時における制動力制御を正確に行い、走行安定性能を向上させる。
【解決手段】車両の左右駆動輪の制動力を独立して制御可能に構成して、実ヨーレイトと車速及び操舵角から演算した目標ヨーレイトとの差に応じて旋回内輪の制動圧Puまたは旋回外輪の制動圧Poを設定し、車両がアンダーステア状態である場合には、旋回内輪の制動圧Puからデフにおけるフリクションによる拘束トルクTdを減算して旋回内輪の制動圧Pu’を求め(S60)、車両がオーバーステア状態である場合には、旋回外輪の制動圧Poにデフにおける拘束トルクTdを加算して旋回外輪の制動圧Po’を求める(S100)。そして、求めた旋回内輪の制動圧Pu’または旋回外輪の制動圧Po’で左右駆動輪を制動する(S110)。
(もっと読む)
走行支援装置
【課題】追従走行制御を行う際、自車両の無駄な加減速を低減し、燃費を向上させる。
【解決手段】走行支援装置は、先行車両の走行状態と先先行車両の走行状態とに基づいて、先行車両と先先行車両との間の車間距離が拡大傾向である否かを判定し、車間距離が拡大傾向であると判定した場合には、自車両の車両速度が先行車両の車両速度よりも高くなるように、自車両の加減速度を制御する制御手段(10)を備える。
(もっと読む)
タイヤ状態推定装置
【課題】タイヤ状態を精度よく推定する。
【解決手段】タイヤすべり角を推定するタイヤすべり角推定手段500と、タイヤすべり角の前回値、タイヤすべり率及びタイヤ縦力に応じてタイヤ力最大値を推定するタイヤ力最大値推定手段300と、を有し、タイヤすべり角推定手段500は、タイヤ力最大値、タイヤすべり率、タイヤ縦力及び車両状態測定値に基づいてタイヤすべり角を推定する。これによって、タイヤ状態を精度よく推定することができる。
(もっと読む)
連結車両の挙動制御装置
【課題】スウェイ状態抑制のためのアンチヨーモーメントの生成を制動力配分制御により実行する挙動制御装置であって、アンチヨーモーメントの生成時に車両の減速が為されないようにして、運転者の違和感や後続車両への影響が回避できるようになった挙動制御装置を提供すること。
【解決手段】本発明の連結車両のスウェイ状態を抑制するための挙動制御装置は、スウェイ状態の発生時に各輪の制動力配分制御によりスウェイ状態を抑制するヨーモーメントを発生すると伴に、制動力配分制御によって各輪に生ずる制動力による車両の減速量に基づいて決定される駆動力を車両の駆動輪に付与することを特徴とする。
(もっと読む)
ブレーキ制御装置
【課題】液圧保持中にブレーキペダルを踏み込んだ際のフィーリングを改善し、微小なブレーキペダル操作でマスタシリンダ圧が急上昇することを防止し、操作に応じた液圧変化が可能で通常のブレーキと同様な操作が可能なブレーキ制御装置を提供する。
【解決手段】アシスト制御ユニット6は、登坂車両停止検出手段において車両が登坂で車両停止していると判断され、かつペダルリリース検出手段によりペダルリリースされたと判断された場合には、ブレーキペダルBの操作に基づき移動する入力ピストン11aによる液圧減少分を電動のモータ31を制御し、アシストピストン21により補間し、マスタシリンダ3内の液圧を保持するブレーキ制御装置。
(もっと読む)
車両運動制御装置
【課題】横転抑制制御を行う必要がないときにまで横転抑制制御が行われてしまうことを防止する。
【解決手段】横転抑制制御の開始条件(Gy>Gs)が満たされることによって一旦横転抑制制御が開始されたとしても、横転抑制制御開始から待ち時間T1が経過した時点で横転抑制制御を継続するべきか中断すべきかを判定する。そして、横転抑制制御を中断すべきと判定されたときに、横転抑制制御の開始条件を満たしていてもそれを継続しないようにする。これにより、本来横転に至らない状況まで横転抑制制御が継続されてしまうことを抑制することができる。
(もっと読む)
車両の運動制御装置
【課題】違和感が少なく、安全性能向上を可能とする車両の運転制御装置を提供する。
【解決手段】四輪の駆動力と制動力を独立に制御可能な車両の運動制御装置において、車両の横運動に連係した前後加減速制御指令に基づいて、四輪のうちの左右輪に略同一の駆動力及び制動力を発生する第1のモード(G−Vectoring制御)と、車両の横滑り情報から算出した目標ヨーモーメントに基づいて、四輪のうちの左右輪に異なる駆動力及び制動力を発生する第2のモード(横滑り防止制御)と、を有し、目標ヨーモーメントが予め定めた閾値以下のときは第1のモードが選択され、目標ヨーモーメントが閾値よりも大きいときは第2のモードが選択される。
(もっと読む)
走行支援装置
【課題】ステアリング及びブレーキによる車線逸脱防止制御中のドライバの操舵介入に対しては違和感のない逸脱防止制御を行うことはできない。
【解決手段】自車が車線からの逸脱しそうな場合又は自車が周囲障害物と衝突しそうな場合に、ブレーキ制御装置によるヨーモーメント又はステアリング制御装置のアシスト操舵トルクの少なくとも一つを制御し、自車の車線からの逸脱又は自車の周囲障害物との衝突を防止する制御装置であって、ステアリングのハンドル舵角,ドライバの操舵トルク及びアシスト操舵トルクの少なくとも一つに基づきドライバの操舵意思を検出し、ドライバの操舵意思を妨げないようにヨーモーメント又はアシスト操舵トルクの少なくとも一つを抑制する。
(もっと読む)
車両の運動制御装置
【課題】急操舵に伴うアンダーステア状態の発生に先立って、車両を運動制御してアンダーステア状態の発生を抑制できるようにした車両の運動制御装置を提供する。
【解決手段】車輪に制動力を付与し、アンダーステア状態の発生を抑制するようにした車両の運動制御装置にして、操舵速度を算出する操舵速度算出手段(106)と、操舵速度算出手段によって算出された操舵速度が基準のしきい値より大きくなった場合に、旋回外輪に制動力を付与する制動力付与手段(110)を備えた。
(もっと読む)
車両運動制御装置
【課題】スプリット路面での車両の不安定性を応答性良く改善でき、ドライバによる修正操舵の振幅を一定範囲内に維持して行えるようにする。
【解決手段】ABS制御の制御モードとして増圧モードが設定されているときに、スプリット制御として、車両の安定性の指標となる舵角偏差driftvalueの絶対値|driftvalue|の大きさに基づいて、高μ路側の前輪に対するABS制御における増圧制御の増圧勾配に制限をかける。これにより、舵角偏差driftvalueに応じて応答性良く高μ路側の車輪の制動力の増加勾配を抑制できる。このため、左右輪間での制動力差を抑制することが可能になり、これに起因するヨーモーメントを抑制できると共に、スプリット路面での車両の不安定性を応答性良く改善できる。また、ヨーモーメントを打ち消すようなドライバによる修正操舵も軽減することができ、ドライバによる修正操舵の振幅を一定範囲内に維持して行うことが可能となる。
(もっと読む)
車両運動制御装置
【課題】車両が旋回時にアンダーステア状態になっても、高い応答性でアンダーステアを
解消する車両運動制御装置を提供する。
【解決手段】車両のアンダーステア状態を検出するアンダーステア検出手段27と、アン
ダーステア検出手段によりアンダーステア状態が検出されたときに、 車両の旋回外
輪に対するブレーキ力の付与を開始する外輪ブレーキ力付与開始手段26と、外輪ブレー
キ力付与開始手段による旋回外輪へのブレーキ力の付与の開始後における旋回外向きのモ
ーメントの増加を検出する外向モーメント増加検出手段26と、外向モーメント増加検出
手段により旋回外向きのモーメントの増加が検出されたときに、外輪ブレーキ力付与開始
手段により開始された旋回外輪へのブレーキ力の付与を停止する外輪ブレーキ力付与停止
手段26と、を備えている。
(もっと読む)
車両制御装置
【課題】燃費や安全面での不必要な制動操作による制動力の発生を少なくすることにより、エネルギー損失の増大を防止することができる車両制御装置を提供する。
【解決手段】 ECU30は、取得した道路形状から車両の加速度パターンを生成し、さらには、車両の速度パターンを生成する。この車速パターンにおける車両の目標速度と現在車速とを比較する。その結果、現在車速が車両の目標速度よりも大きくない場合には、減速支援を実行する。減速支援では、回生可能減速度に到達するまでは、ブレーキ踏み込み量に対して、要求減速度が小さくなるように制御し、回生可能減速度の範囲で減速要求を行いやすくする。
(もっと読む)
車両用ブレーキ制御装置
【課題】ポンプ漏れ量を加味してポンプ漏れが無い場合と同様の運転挙動制御が行えるようにする。
【解決手段】差圧制御弁によって規定差圧を発生させつつ、各規定差圧に対応したポンプ漏れモータ回転数を求め、規定差圧に対するポンプ漏れモータ回転数特性を記憶する。この規定差圧に対するポンプ漏れモータ回転数特性を利用して、運動挙動制御によってモータを駆動するときには、ポンプ漏れを加味したモータ目標回転数にてモータを駆動する。これにより、ポンプ漏れが発生していても、ポンプ漏れが発生していない場合と同じ応答性で目標差圧を発生させることが可能となる。したがって、差圧制御弁によって目標差圧を発生させることで、車両の運動挙動制御を行う車両用ブレーキ制御装置において、ポンプ漏れ量を加味してポンプ漏れが無い場合と同様の運転挙動制御を行うことが可能となる。
(もっと読む)
牽引車輌の制御装置
【課題】センサ数の増大を抑制しながら牽引車両の挙動の安定化が可能な制御装置を構成する。
【解決手段】制御装置の安定化制御部23が、トラクタに作用する横加速度GYと、ヨーレートYrと、走行速度Vと、操舵角δとに基づいてヒッチ点に作用するヒッチ点横力Fhを推定するヒッチ点横力推定部23Cを備えている。この安定化制御部23は、推定されたヒッチ点横力Fhと逆方向となる相殺ヨーモーメントを演算する相殺ヨーモーメント演算部23Dと、この相殺ヨーモーメントを出力するヨーモーメント出力部23Eとを備えている。このヨーモーメント出力部23Eはトラクタの車輪の左右の一方に制動力を作用させる。
(もっと読む)
車両の運動制御装置
【課題】ステア特性制御と安定化制御との間の制御干渉を抑制できる車両の運動制御装置を提供すること。
【解決手段】ステア特性制御としてスタビライザ制御、減衰力制御等が実行されて、車両のステア特性が車両の走行状態に応じて意図的に初期ステア特性から変更される。安定化制御では、オーバステア状態量Jos(アンダステア状態量Jus)がしきい値Tho(Thu)を超えた場合、制動トルクの調整により発生するヨーモーメントを利用してステア特性が初期ステア特性に近づけられる。ステア特性制御によりステア特性がオーバステア側(アンダステア側)に調整されている場合、しきい値Tho(Thu)が大きくされて、安定化制御が開始され難くなる。ステア特性制御によりステア特性が意図的に調整される傾向が安定化制御の介入により抑制される事態(制御干渉)が抑制され得る。
(もっと読む)
車両挙動制御装置
【課題】より早くから車両状態が不安定領域に至る可能性があることを見出し、制御開始することで、より車両の安定性を高くすることを可能とする。
【解決手段】車両が横滑りに至った不安定領域R2となるより前の状態である横滑り前状態を検出し、横滑り前状態が検出されたときに旋回外側後輪に対して制動力を発生させる。この旋回外側後輪に発生させた制動力によって、旋回外輪に対して掛かる荷重が増加させられ、車両の横力が増加させられる。このため、車両の横滑りを発生させ難くすることが可能となり、いわゆるスロースピンのような緩やかな車両挙動低下を事前に抑制することができる。よって、より早くから車両状態が不安定領域に至る可能性があることを見出し、制御開始することで、より車両の安定性を高くすることが可能となる。
(もっと読む)
201 - 220 / 774
[ Back to top ]