
Fターム[3D246HA81]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | ヨーレート (774)
Fターム[3D246HA81]に分類される特許
121 - 140 / 774
運転支援システム
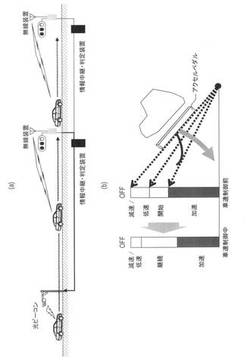
【課題】車体速度を所望の速度に維持するよう制御する車速制御が不意に解除されてしまうことを防ぐこと。
【解決手段】アクセルペダルの操作量が増加した後に、ユーザが車速制御の開始を所望すると判定するために予め設定された「車速制御開始範囲」内となった場合には開始指示をエンジンECU2へ出力する。車速制御の実行中に、アクセルペダルの操作量が、ユーザが車速制御の継続を所望すると判定するために予め設定された、車速制御開始範囲を包含する「車速制御継続範囲」内にある場合には解除指示をエンジンECU2へ出力せず、一方、アクセルペダルの操作量が車速制御継続範囲内にはなくなった場合には解除指示をエンジンECU2へ出力する。車速制御継続範囲が車速制御開始範囲を包含するので、何らかの要因でアクセルペダルの操作量が変化しても、操作量が車速制御継続範囲にある限りにおいては車速制御が解除されない。
(もっと読む)
運転操作支援装置及び運転操作支援方法

【課題】運転者に違和感をより低減しつつ、回避支援をすることが可能な運転操作支援の技術を提供する。
【解決手段】障害物に対し自車両MMが緊急回避状況であると判定すると、緊急回避のための制御として操舵制御と制動制御の両方の制御を行い、自車両MMが障害物回避を完了したと判定すると、緊急回避のための制御の解除待機モードに移行し、自車両MMの車両状態が安定したと判定すると上記緊急回避のための制御を解除する。但し、上記解除待機モード中に、運転者による意図的なアクセル操作介入を検出すると、自車両MMの車両状態が安定したと判定する前であっても、制動制御のみ先に解除する。
(もっと読む)
車両挙動制御装置及びその方法
【課題】車両挙動制御により車両挙動がオーバーシュートしてしまうのを抑制する。
【解決手段】車両挙動制御装置は、操舵角比例目標ヨーレイト算出部12が算出した運転者の操舵操作に車両挙動を追従させるための自車両の目標ヨーレイトと推定ヨーレイト算出部13が算出した自車両の推定ヨーレイトとの偏差の変化を基に、自車両にヨーモーメントを付与するための目標ヨーモーメントを算出する目標ヨーモーメント算出部16と、目標ヨーモーメント算出部16が算出した目標ヨーモーメントを基に、ヨーモーメントを付与するVDCコントローラ3及びブレーキ液圧算出部17と、を備え、偏差の変化の推移に応じて、第1目標ヨーモーメント、第1目標ヨーモーメントよりも小さい付与抑制目標ヨーモーメント、及び第1目標ヨーモーメントとはヨーモーメントの方向が反対方向となる第2目標ヨーモーメントの順序で目標ヨーモーメントを算出する。
(もっと読む)
車両走行制御装置及びその方法
【課題】アンダステア抑制制御中の車両のタックインの発生に起因する制動力制御が運転者に違和感を与えてしまうのを防止する。
【解決手段】車両走行制御装置は、アンダステア抑制制御中のアクセルペダルの操作状態を基に、車両のタックインの発生を推定するタックイン推定部16と、タックイン推定部16がタックインが発生すると推定したとき、アンダステア抑制制御による前後輪の制動力を減少させて前後輪の制動力の付与を解除する減少勾配算出部17及びブレーキ液圧算出部18と、を有し、減少勾配算出部17及びブレーキ液圧算出部18は、前後輪の制動力配分を後輪寄りに設定して前後輪の制動力を減少させる。
(もっと読む)
車両用速度制御装置
【課題】先行車両が存在しない状況においても、ドライバにとって違和感のない速度制御を行うことができる車両用速度制御装置を提供する。
【解決手段】ブレーキペダル操作を開始し、相対速度が一定の値変化した時点で、自車両よりも初期距離だけ前を目標速度で相当する仮想先行車を設定する。そして、初期距離、目標速度から、接近離間状態評価指標の初期値を算出する。さらに、速度制御開始条件成立後の相対距離を、その条件が成立してからの経過時間と、相対速度の現在値と、初期距離とから逐次算出する。そして、これら初期距離、接近離間状態評価指標の初期値、相対距離から目標相対速度を逐次算出する。そして、目標相対速度と現在の実際の相対速度との差に基づいて速度制御を行う。よって、先行車両が存在していなくても、接近離間状態評価指標KdBを用いた、ドライバにとって違和感のない速度制御を行うことができる。
(もっと読む)
車両制御装置
【課題】 運転者に与える違和感を抑制することができる車両制御装置を提供すること。
【解決手段】 車両に搭載され、前記車両の走行中の道路形状を認識する道路形状認識手段と、前記道路形状認識手段により走行路の前方にカーブが認識されたときに前記カーブに基づいて算出された目標速度になるようにアクチュエータを駆動し減速制御を行う速度制御手段と、前記車両の直進状態を判定する直進状態判定手段と、を設け、前記速度制御手段は、前記直進状態判定手段によって直進状態判定後に前記減速制御を行うようにした。
(もっと読む)
先行車検知装置
【課題】最適車間維持装置において、隣接車線を走行する車両を先行車両とする誤認識を減少させる。
【解決手段】ECU5は車速センサ2が検出する車速と回転角速度3が検出するヨーレートから算出する車両1の予想進路と、物体検知センサ4が検出し、前方車両判別手段が判別した前方車両との距離を算出し、判定距離設定手段が設定した先行車判定の判定距離と比較する。判定距離は物体検知センサ4が検出した前方車両と車両1との相対速度から算出し、車両1からの相対速度の増加に応じて短く設定することで車両1から高速で離間する前方車両を先行車の判定から除外する。
(もっと読む)
車両の運動制御装置
【課題】
車両が走行する路面状態、及び、操舵状態に応じた制動制御によって、適正に車両安定性を確保し得る車両の運動制御装置を提供する。
【解決手段】
車両の運動制御装置の制御手段CTLは、操舵操作部材SWの操舵量Saa及び操舵速度dSa、車両の旋回状態の程度を表す旋回量Tcaに基づいて、車輪の制動トルクを増加して車両安定性を向上する。制御手段CTLは、旋回量Tcaがしきい量Stcを超過し、且つ、操舵速度dSaがしきい速度Sdsを超過する場合に制動トルクを増加する。制御手段CTLは、操舵量Saaが連続して増減する過渡操舵状態を操舵量Saaに基づいて判別し、過渡操舵状態を判別する場合に、しきい量Stcを小さい値に変更する。さらに、制御手段CTLは、過渡操舵状態を判別する場合に、しきい速度Sdsを小さい値に変更する。
(もっと読む)
車両の制動制御装置
【課題】
車両の安定性を確保する車両安定化制御において、回生制動と摩擦制動とを効率的に協働し得る車両の制動制御装置を提供する。
【解決手段】
車両の車輪に摩擦制動トルクを付与する摩擦制動手段FRCと、車輪に回生制動トルクを付与する回生制動手段RGNと、制御手段CTLを備える。制御手段CTLは、車両の旋回状態の程度を表す旋回量Tcaに基づいて演算される第1状態量Tcx(例えば、ステア特性量Sch)に基づいて摩擦制動トルクを増加する摩擦制動制御を実行するとともに、旋回量Tcaに基づいて演算される、第1状態量Tcxとは異なる第2状態量Tcy(例えば、操舵速度dSa)に基づいて回生制動トルクを増加する回生制動制御を実行する。制御手段CTLは、回生制動トルクの増加を開始した後に、摩擦制動トルクの増加を開始する。また、回生制動手段RGNは、車輪のうちで少なくとも前輪に備えられる。
(もっと読む)
車両の運動制御装置
【課題】
車両が走行する路面状態、及び、操舵状態に応じた制動制御によって、適正に車両安定性を確保し得る車両の運動制御装置を提供する。
【解決手段】
車両の運動制御装置の制御手段CTLは、操舵速度dSaに基づいて、制動手段MBRを介して、車輪の制動トルクを増加して車両安定性を確保する制動制御を実行する。制御手段CTLは、車両の旋回状態の程度を表す旋回量Tcaに基づいて制動トルクの増加量Bwt[**]を決定し、操舵速度dSaに基づいて制動トルクの増加を有効とする有効状態か、制動トルクの増加を無効とする無効状態かを判定する。制御手段CTLは、有効状態にある場合に制動トルク量Bwt[**]に基づいて制動トルクを増加するとともに、無効状態にある場合には制動制御が実行される前の状態に制動トルクを保持する。
(もっと読む)
車両の運動制御装置
【課題】
車両が走行する路面状態、及び、操舵状態に応じた制動制御によって、適正に車両安定性を確保し得る車両の運動制御装置を提供する。
【解決手段】
車両の運動制御装置の制御手段CTLは、車両の運転者によって操作される操舵操作部材の操舵状態Saa,dSa、及び、車両の旋回運動の程度を表す旋回量Tcaのうちで少なくとも1つに基づいて、車輪の制動トルクを増加する。車両の運動制御装置の抑制手段ASLは、各車輪の速度Vwa[**]に基づいて、各車輪の前後スリップ量Slp[**]がしきいスリップ量を超過する場合に車輪の制動トルクを調整して前後スリップ量Slp[**]を抑制する。そして、抑制手段ASLは、制御手段CTLが制動トルクを増加する場合にしきいスリップ量を増加する。また、抑制手段ASLは、車両の旋回外側前方車輪のしきいスリップ量を増加し、車両の旋回内側前方車輪のしきいスリップ量を保持する。
(もっと読む)
車両の運動制御装置
【課題】
車両が走行する路面状態、及び、操舵状態に応じた制動制御によって、適正に車両安定性を確保し得る車両の運動制御装置を提供する。
【解決手段】
車両の運動制御装置の制御手段CTLは、操舵操作部材SWの操舵量Saa、及び、車両の旋回状態の程度を表す旋回量Tcaに基づいて、制動手段を介して車輪の制動トルクを増加して車両安定性を向上する制動制御を実行する。制御手段CTLは、旋回量Tcaが規範量Trfを超過する場合に制動トルクを増加する。制御手段CTLは、操舵量Saaが連続して増減する過渡操舵状態を操舵量Saaに基づいて判別し、過渡操舵状態を判別する場合には規範量Trfを小さい値に変更する。制御手段CTLは、操舵速度dSaに基づいて、操舵速度dSaが大きいほど規範量Trfを小さく設定する。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供することを課題とする。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値βlmtuと下限値βlmtdの間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値βlmtuより大きくなることおよび下限値βlmtdより小さくなることを防止する。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供する。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値と下限値の間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値より大きくなることおよび下限値より小さくなることを防止する。
(もっと読む)
カーブ進入制御装置
【課題】実際に走行する分岐先道路に適した制動警報を行うことにより、ドライバへの違和感を軽減する。
【解決手段】高速道路の分岐路を進む際のカーブ進入制御装置であって、この装置は、自車前方の本線道路の分岐である分岐情報及び自車位置情報と、走行中の道路を撮像する撮像手段により検出した走行車線情報に基づいて、前方分岐における走行予定車線を推定する走行予定車線推定手段(S30)と、走行予定車線推定手段により推定された走行予定車線に基づいて、制動警報を作動させるか否かを判断する制動警報判断手段(S110)とを備える。
(もっと読む)
乗員保護装置
【課題】緊急制動時の後続車両との追突事故を回避するため、自車に追突する危険性が高い後方車両をより正確に判断することによって信頼性の高い乗員保護装置を得る。
【解決手段】後方物体情報に基づいて後方物体の自車両への接近形態を推定する接近形態推定手段を備え、自車両へ接近する後方物体であっても後突の危険性が低いと接近形態情報を用いて判断する場合には、後突危険度判定手段において従前の後突危険度を保持するようにした。
(もっと読む)
運転支援装置
【課題】車両の運転操作を行う過程で積み重ねられるドライバの心理に即した運転支援を実現することのできる運転支援装置を提供する。
【解決手段】車両の運転域における各交通情報下での操作態様を検出しつつ、それら検出された操作態様に関する情報を交通情報毎に関連付けして学習する。そして、前回の減速地点で行われた減速操作と次の減速地点に関連付けして学習されている情報とに基づいて次に実行すべき運転支援態様を決定する。
(もっと読む)
マップデータを使用する乗物ESCシステムのための方法及びシステム
【課題】乗物用の改良型電子安定性制御システムを提供する。
【解決手段】乗物用の電子安定性制御(ESC)システムが開示される。電子制御ユニット(ECU)は、乗物のブレーキ及びスロットルの動作に変更を加えることで、意図された乗物方向及び/又はヨーレートと、実際の乗物方向及び/又はヨーレートとの間の差を減少することにより、乗物の横滑りを減少するようにプログラムされる。ESCシステムは、車輪速度センサ、ハンドル位置センサ、ヨーレートセンサ、及び横方向加速度センサから入力を受け取る。又、ESCシステムは、乗物が位置している道路の特性を少なくとも指示する入力も受け取り、乗物が位置する道路は、マップデータベースを使用するポジショニングシステムから決定され、又、特性は、マップデータベースから決定される。
(もっと読む)
制動力制御装置
【課題】リアリフトが発生したときには速やかにリアリフトを解消して車両の動作の安定化を図る制動力制御装置を提供することを課題とする。
【解決手段】ブレーキECU6は、後輪(右後輪73、左後輪74)の後輪車輪速Vwrの変化、後輪に基づいて算出する後輪由来車速Vcrの変化、車両100に発生するピッチングモーメントに基づいて車両100にリアリフトが発生したことを判定する。そして、車両100にリアリフトが発生した場合、前輪(右前輪71、左前輪72)に付与する制動力を制限して減速度を小さくする。さらに、ブレーキECU6は、左前輪72の制動力の変化と位相をずらして右前輪71の制動力を変化させて車両100にヨーモーメントを発生させる。
(もっと読む)
回生協調ブレーキ用ストロークシミュレータ
【課題】 非回生協調ブレーキ作動時と回生協調ブレーキ作動時とのブレーキペダル作動フィーリングを同一とする、小型簡素化されたストロークシミュレータを提供する。
【解決手段】 ブレーキペダルの回動支点と、遊星歯車機構と、マスタシリンダに連繋するプッシュロッドを駆動するプッシュロッドアームとを同軸に構成して、正逆転自在なモータの回動を遊星歯車機構に作用させて、回生協調ブレーキ作動時には非回生協調ブレーキ作動時のブレーキペダル入力に対応するブレーキペダルストローク線図となるよう補正制御をする。
(もっと読む)
121 - 140 / 774
[ Back to top ]