
Fターム[3D246HA81]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | ヨーレート (774)
Fターム[3D246HA81]に分類される特許
161 - 180 / 774
車両の運動制御装置
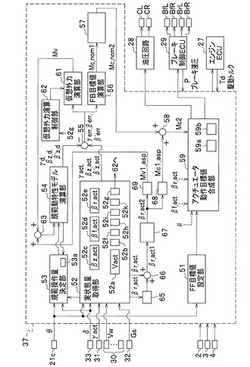
【課題】車両の操作状態量や運動状態量を検知するセンサからの信号が異常な場合にも、運転者に違和感を与えない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act、実ヨーレートγactを偏差演算部55に入力する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d、規範ヨーレートを算出して偏差演算部55に入力する。仮想外力演算部61は、偏差演算部55から出力される偏差にもとづいて、規範動特性モデル演算部54に仮想外力Mvをフィードバックする。このとき、仮想外力演算制御部62が、前記したセンサからの信号の検知状態にもとづいて、仮想外力の補正を制御する。
(もっと読む)
車両の旋回制御装置

【課題】通常旋回時の回頭性を向上する。
【解決手段】車両の走行状態に基づいて左右車輪に制動力を付与することにより車体にヨーモーメントを発生可能な車両の旋回制御装置1であって、横Gセンサ5と車速センサ4の検知信号に基づいて横G規範ヨーレートを算出する横G規範ヨーレート演算部14と、操舵角センサ3と車速センサ4の検知信号に基づいて定常規範ヨーレートを決定する定常規範ヨーレート演算部12と、定常規範ヨーレートに基づいて横G規範ヨーレートを増加方向に補正して限界規範ヨーレートを算出する補正部15と、限界規範ヨーレートとヨーレートセンサ6により検知された実ヨーレートとのヨーレート偏差を算出し、ヨーレート偏差を打ち消す方向へ制動力制御量を決定するFB制御量演算部19と、FB制御量演算部19により決定された制動力制御量に基づいて制動力を制御するブレーキ装置10と、を備える。
(もっと読む)
車線逸脱防止装置
【課題】ブレーキ冷間時のブレーキ制動力低下の影響を抑制して、車線逸脱防止制御として所望のヨーモーメントを自車両に付与する。
【解決手段】車線逸脱防止装置は、エンジンの始動状態(ステップS31、ステップS32)、ブレーキの作動状態(ステップS34)、ワイパーの作動状態(ステップS37)、外気温及び自車速の状態(ステップS39)に基づいて、制動力発生手段の温度を評価するブレーキエネルギ評価指標値Ecbrを算出し(ステップS41)、そのブレーキエネルギ評価指標値Ecbrに基づいて、車線逸脱防止制御の制御量としての目標ヨーモーメントを補正する(ステップS41、ステップS42)。
(もっと読む)
ブレーキ制御装置
【課題】 減圧時における減圧弁の作動頻度を低減できるブレーキ制御装置を提供する。
【解決手段】 ブレーキECU102は、同一配管系の2つのホイルシリンダW/Cに対する液圧指令値Pwcomにおいて、一方の液圧指令値Pwcomが他方の液圧指令値Pwcomよりも低く、低圧側のホイルシリンダW/Cの液圧指令値Pwcomが減圧指令である場合に、一方のソレノイドインバルブ4とソレノイドアウトバルブ5を共に閉じて低圧側のホイルシリンダW/Cの液圧を保持するよう液圧制御を行い、その後2つの液圧指令値Pwcomが略同一となったとき、ソレノイドインバルブ4を開弁する。
(もっと読む)
モータ走行車両制御装置、モータ走行車両制御方法
【課題】坂路においてモータが過熱することを事前に防ぐことが可能なモータ走行車両制御装置及びモータ走行車両制御方法を提供すること。
【解決手段】駆動力の少なくとも一部を電気モータ16とする車両のモータ走行車両制御装置100であって、車速を検出する車速検出手段61と、アクセル開度を検出するアクセル開度検出手段14と、路面の傾斜を検出する傾斜検出手段13と、車速に基づいて車両の停止状態を判定する停止判定手段と、停止判定手段により停止状態であると判定され、アクセル開度が第1の閾値より大、かつ、路面の傾斜が第2の閾値より大、という条件が成立する車両状況か否かを判定する判定手段63と、車両状況の場合、車両に制動力を加える制動制御手段66と、電気モータのモータ電流を低下させるモータ電流制御手段65と、を有することを特徴とする。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 左右の駆動輪に駆動力を配分制御してヨー運動を制御する際に、ヨー運動の制御初期の応答性を確保しながら、過制御により車両が不安定になるのを防止する。
【解決手段】 駆動源からの駆動力を左右の駆動輪に配分する駆動力配分量を車両の横方向挙動の状態量に基づいて制御する際に、前記駆動力配分量を、操舵角速度算出手段32で算出した操舵角速度θ′と横加速度変化率算出手段31で算出した横加速度変化率YG′とに基づいて補正するので、操舵角θよりも立ち上がりの変化が大きい操舵角速度θ′によりヨー運動の制御初期の応答性を確保しながら、車両の実際のヨー運動の状態を表す状態量である横加速度変化率YG′を用いることで、車両の横方向の運動性能の変化をフィードバックして駆動力配分制御に反映させ、これにより駆動力配分制御が過制御に陥るのを効果的に防止することができる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 オーバーステア状態を解消すべく旋回内輪に配分する駆動力を増加させたときに、逆にオーバーステア状態が助長されるの事態を防止する。
【解決手段】 旋回方向判定手段が車両の旋回方向を判定すると(ステップS32)、旋回内輪スリップ率算出手段が旋回内輪のスリップ率Rslを算出し(ステップS33)、そのスリップ率Rslが閾値を超えると、駆動力配分量保持手段(ステップS35)が駆動力配分装置の駆動力配分量を前記スリップ率Rslが閾値Rrefを超えたときの値に保持する。これにより、旋回中に生じたオーバーステア状態を解消すべく旋回内輪に配分する駆動力を増加させても、旋回内輪に作用する荷重がタイヤの摩擦円を超えるのを未然に防止することで、旋回内輪がスリップしてグリップが失われのを回避し、オーバーステア状態が助長されないようにして車両挙動の安定化を図ることができる。
(もっと読む)
車両用運動制御装置
【課題】ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行う車両用運動制御装置を提供する。
【解決手段】ステアリング制御とブレーキ制御のいずれをメインに行うかを選択し、その選択結果に基づいて、メインとされる側に対して行わせる車両旋回運動の要求値を出力すると共に、メインとされない側に目標値とメイン側要求値との差に応じた要求値を出力することで、ステアリング制御とブレーキ制御それぞれの配分を適切に設定する。これにより、ステアリング制御をメインとしつつブレーキ制御による補助を行うことが可能となるため、ステアリング制御のみの場合よりも目標値追従性を向上させた車両運動制御が行える。そして、ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行うことが可能となる。
(もっと読む)
走行制御装置および走行制御方法
【課題】車両を自律走行させる場合に車両の搭乗者に与える不快感を軽減できる走行制御装置および走行制御方法を提供すること。
【解決手段】車両1を自律走行させると、運転者を含む搭乗者に前触れもなく、突然切り返しが行われる場合があり、予測の困難な前後Gが車両1の搭乗者に加わることがある。本実施形態の走行制御装置100は、車両1の前進および後退を切り換える切り返し地点に車両1が到着する場合に、車両1の車両速度Vに基づいてクッションタイムを設定する。クッションタイムが設定されると、切り返し地点において車両1が所定時間停車させられるので、車両1が停車している間に、車両1の搭乗者に加わっている前後Gを緩和させることができる。よって、車両1の搭乗者に与える不快感を軽減できる。
(もっと読む)
隊列走行システム、先頭無人車両コントローラ、後続有人車両コントローラ、制御方法、及びプログラム
【課題】複数の車両を隊列走行させること。
【解決手段】先頭無人車両コントローラ110と、後続有人車両コントローラ130とを備え、先頭無人車両コントローラ110は、映像を示すデータを後続有人車両コントローラ130に送信する映像データ送信部と、無人車両200Aの操縦を制御するためのデータを後続有人車両コントローラ130から受信する制御データ受信部と、無人車両200Aの操縦を制御する操縦制御部とを有し、後続有人車両コントローラ130は、映像を示すデータを先頭無人車両コントローラ110から受信する映像データ受信部と、映像データ受信部が受信したデータを、表示手段に出力する映像データ出力部と、無人車両200Aの操縦を制御するためのデータの入力を、操縦手段から受け付ける制御データ入力受付部と、制御データ入力受付部が入力を受け付けたデータを先頭無人車両コントローラ110に送信する制御データ送信部とを有する。
(もっと読む)
走行制御装置
【課題】車線変更の際に、自車両の横移動を抑制しようとする不適当な制御介入を防ぐ。
【解決手段】側方車両を検出している状態で(ステップS7の判定が“No”)、自車両の後刻横位置Xfが作動閾値Xaを超えたら(ステップS19の判定が“No”)、左右輪の制動力差によって側方車両の側とは逆方向へのヨーモーメントを発生させる(ステップS21)。但し、側方物体を検出していない状態で(ステップS7の判定が“Yes”)、自車両が車線変更のために隣接車線への進入を開始していれば(ステップS11又はS14の判定が“Yes”)、作動抑制フラグをFc=1にセットすることで(ステップS12)、その後に側方物体が現れても(ステップS7の判定が“No”)、接近防止制御の作動を抑制する(ステップS17の判定が“Yes”)。
(もっと読む)
減速制御装置、方法およびプログラム
【課題】運転者が煩わしさを感じることを抑制すること。
【解決手段】車両の前方の状況に基づいて前記車両を停止させるべき停止要因を特定し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存しない場合には、所定の制動期間で前記車両を停止させる第1減速制御を実行対象減速制御として選択し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存する場合には、前記第1減速制御よりも制動期間が短い第2減速制御を実行対象減速制御として選択し、前記実行対象減速制御を実行して前記停止要因に応じた停止位置にて前記車両を停止させる。
(もっと読む)
車輪の制動力推定装置、及び、該装置を備えた車両の運動制御装置
【課題】
摩擦部材の摩擦係数に変動があっても、適正に各車輪の制動力を推定できる車輪の制動力推定装置を提供する。また、該装置によって推定された制動力に基づいて、車両の運動を安定化する車両の運動制御装置を提供する。
【解決手段】
車輪の制動力推定装置は、車両の各車輪に制動力を発生させる制動手段の摩擦部材の押付量を取得する押付量取得手段と、前記車両の前後加速度を取得する前後加速度取得手段と、前記前後加速度に基づいて前記車両に作用する減速力を演算し、該減速力及び前記押付量に基づいて前記制動力を推定する。前記推定手段は、前記車両の全ての車輪の前記押付量の総和に対する前記車両の1つの車輪の前記押付量の比率を、前記減速力に乗じることにより前記制動力を推定する。さらに、前記推定制動力に基づいて、制動制御及び操舵制御のうち少なくとも一方を実行して前記車両の運動を安定化する。
(もっと読む)
車両挙動制御装置
【課題】車両挙動制御装置において、車両の旋回制御と制動力制御との干渉を抑制可能とする。
【解決手段】左右輪の速度差により制動力制御を実行するABS制御部12aと、左右輪の制動力差により旋回制御(回転半径短縮制御)を実行する回転半径短縮制御部12bと、回転半径短縮制御部12bによる回転半径短縮制御が実行されるときにはABS制御部12aによる制動力制御を抑制する調停部12cを設ける。
(もっと読む)
車両の前後加速度修正装置を備えた車両の諸元推定装置、及び車両の前後加速度修正装置
【課題】
前後加速度の誤差を考慮して、車両の積載量によって変化する車両諸元(例えば、車両重量)を精度良く推定するための前後加速度の修正装置を提供する。さらに、この前後加速度修正装置によって推定された前後加速度の情報に基づいて高精度に車両諸元を推定する。
【解決手段】
車両の前後加速度修正装置は、車両の前後加速度(Gxa)を取得する前後加速度取得手段(GXA)と、前記車両に作用する走行抵抗(Grr)を取得する走行抵抗取得手段(GRR)とを備え、前記前後加速度(Gxa)から前記走行抵抗(Grr)を除いて修正加速度(Gxs)とする。車両の諸元推定装置は、加速操作量取得手段(ASA)によって取得される加速操作量(Asa)、或いは、減速操作量取得手段(BSA)によって取得される減速操作量(Bsa)と、前記修正加速度(Gxs)とに基づいて、前記車両諸元を推定する。
(もっと読む)
アイドルストップ車の制御装置
【課題】エンジン再始動時のヒルスタートの制御に用いられる液圧制御バルブの消費電力の状態を考慮したアイドルストップの制御を行なう。
【解決手段】アイドルストップの制御によってエンジンを自動停止する前に、それまでの走行中の通電駆動によりブレーキアクチュエータ7のソレノイドバルブ群8のブレーキ液圧制御バルブ8a、8bが所定温度以上になっているか否かを、ブレーキ制御ユニット13の判断部13dにより判断し、ヒルスタートの制御に用いられるブレーキ液圧制御バルブ8a、8bが所定温度以上の高温の状態であってその消費電力が大きい状態であると判断すれば、ブレーキ制御ユニット13の禁止指令部13bによりアイドルストップの制御を禁止し、ブレーキ液圧制御バルブ8a、8bの消費電力の状態を考慮して、エンジンの再始動が確実に行なえるときにのみアイドルストップの制御を行なう。
(もっと読む)
車両制御システム
【課題】車両挙動制御装置がOFFの状態にされていた場合であっても、ドライバの覚醒度が低い場合には、ドライバによる障害物回避操作および車両安定化操作を支援できる車両制御システムを提供すること。
【解決手段】車両の挙動を制御する車両挙動制御装置を備えた車両制御システムSにおいて、障害物との接触を回避するとともに前記車両の挙動を安定化させるために前記車両挙動制御装置を制御する車両挙動制御手段と、ドライバの覚醒度を判定する覚醒レベル判定部32と、を備え、前記車両挙動制御手段は、前記車両挙動制御装置がOFFの状態であっても、前記覚醒レベル判定部32により判定された覚醒度が所定の覚醒度より低い場合には、前記車両挙動制御装置をONの状態に切り替えることを特徴とする。
(もっと読む)
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定し、車両旋回状態にて各車輪の不要な前後スリップの発生を抑制しつつ小回り性を向上し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の基準位置(点O)が決定され、この基準位置から車両に近い側に車両の旋回中心(点P)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωptが演算される。この目標角速度と、旋回中心からの各車輪の距離Rpw[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され且つ小回り性が向上するように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づく。
(もっと読む)
車両の速度制御装置
【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
車両制御システム
【課題】ドライバの覚醒度が低い場合であっても、車両挙動制御装置本来の性能を十分に発揮させることができる車両制御システムを提供すること。
【解決手段】車両の挙動を制御する車両挙動制御装置を備えた車両制御システムSにおいて、障害物が接近したときに当該障害物との接触を回避するために前記車両挙動制御装置を制御する障害物回避制御手段と、前記障害物との接触を回避した後に前記車両の挙動を安定化させるために前記車両挙動制御装置を制御する車両安定化制御手段と、ドライバの覚醒度を判定する覚醒レベル判定部32と、を備え、前記障害物回避制御手段は、前記覚醒レベル判定部32により判定された覚醒度が低いときほど前記車両挙動制御装置の制御量を増大させ、前記車両安定化制御手段は、前記覚醒レベル判定部32により判定された覚醒度が低いときほど前記車両挙動制御装置の制御量を減少させる。
(もっと読む)
161 - 180 / 774
[ Back to top ]