
Fターム[3D246HA81]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | ヨーレート (774)
Fターム[3D246HA81]に分類される特許
141 - 160 / 774
車両の運動制御装置
【課題】
運転者が障害物等を回避する緊急操舵において、路面の摩擦係数を用いることなく、路面状態に応じた好適な制動力制御を実行できる車両の運動制御装置を提供する。
【解決手段】
車両の車輪に制動トルクを付与する制動手段と、車両の操舵状態が緊急操舵であるか否かを取得する緊急操舵取得手段と、緊急操舵取得手段が前記緊急操舵であることを取得した場合において、車輪の制動トルクを増加する制御手段とを備える車両の運動制御装置であって、車輪速度を取得する車輪速度取得手段と、車輪速度に基づいて過大な前後スリップを抑制するスリップ抑制制御を実行するスリップ抑制手段とを備え、前記制御手段は旋回内側の前輪にスリップ抑制制御が実行される場合に、旋回外側の前輪に対する制動トルクの増加量を制限する制限制御を行う。
(もっと読む)
後退判定装置、および後退判定方法

【課題】ヨーレートなどにより車両の後退を判定する後退判定装置において、早く正確に後退を判定する。
【解決手段】車両の車体速と、車両に加わる横加速度と、車両のヨーレートとを基に、車両の後退を判定する後退判定装置10を、横加速度検出手段で検出した横加速度に基づき、車両の後ろ側車軸における横加速度である後軸横加速度を算出する後軸横加速度算出部11と、後軸横加速度と車体速検出手段で検出した車体速とに基づき、車両の軌跡角レートを算出する軌跡角レート算出部12と、軌跡角レートとヨーレートセンサで検出したヨーレートとを比較して車両の後退を判定する後退判定部13とを備えるように構成した。
(もっと読む)
車両の運動制御装置
【課題】
運転者が障害物等を回避する緊急操舵において、迅速な進路変更を可能とすると共に、進路変更後の車両安定性を好適に確保する。
【解決手段】
緊急操舵取得手段(MKQ)が、緊急操舵であることを取得した場合において、制御手段(CTL)は、前輪制動トルク、及び、後輪制動トルクを増加する。緊急操舵が取得された場合(Kqs=1)、前輪制動トルクに対する前記後輪トルクの比率である前後比率(Hzs)を、緊急操舵が取得されない場合(Kqs=0)の前後比率(Cno,Ko)に比較して小さい特性(Ckq,Kp)をもって前輪制動トルク、及び、後輪制動トルクを増加する。さらに、制御手段(CTL)は、後輪制動トルクの時間変化量(Kr)が、前輪制動トルクの時間変化量(Kf)よりも小さくなるように調整する。
(もっと読む)
車両の運動制御装置
【課題】制御可能範囲が拡大され、よりアクティブな制御介入が実現できる車両の制御装置を提供することを目的とする。
【解決手段】操作状態量及び運動状態量に対応した車両の規範姿勢状態量を、所定の外力が作用する状態における車両の運動モデルにもとづき演算する規範姿勢状態量演算手段54と、路面摩擦係数推定値を含む前記車両の実姿勢状態量を推定する実姿勢状態推定部52と、実姿勢状態量(慣性力)および前後力に基づき路面摩擦係数相当値を決定する路面摩擦係数相当値決定部200と、実姿勢状態推定部が推定した前記路面摩擦係数推定値と前記路面摩擦係数相当値決定部200が決定した路面摩擦係数相当値に基づき、実路面摩擦係数を推定する実路面摩擦係数推定部400とを備えることを特徴とする車両の運動制御装置
(もっと読む)
車両の運動制御装置
【課題】実車挙動観測装置が推定する推定運動状態量の誤差が大きい場合であっても運転者が受ける違和感を軽減できる車両の制御装置を提供することを課題とする。
【解決手段】実車1に備わるヨーモーメント制御量算出部37aが算出して規範モデル301に入力する仮想外力MVFBの成分のうち、すべり角偏差βerrを含んだβ成分の大きさが、ヨーレート偏差γerrを含んだγ成分の大きさより大きい場合、ヨーモーメント制御量算出部37aは、β成分の大きさがγ成分の大きさより小さくなるようにすべり角偏差βerrを補正する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の運動を示す車両パラメータに基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の意図しない運転操作や走行路面の影響に起因して変動する変動成分を減衰させた前記加速度に基づいて前記指標を求めるノイズ除去装置を設けた車両の制御装置である。
(もっと読む)
車両運動制御装置
【課題】ロール角が大きくなることを抑制しつつ、さらにアンダーステアを増大させる必要が無くなったときに、早期にアンダーステアの増大を抑制することができるようにする。
【解決手段】実横加速度Gyrが目標横加速度Gth以上であったとしても、舵角横加速度Gysとヨーレート横加速度Gyyの少なくとも一方が目標横加速度Gth未満になったときに、制御対象輪のW/C圧の増圧を禁止するようにしている。このため、横転を抑制するために積極的にアンダーステアを発生させるようにしてロール角が大きくなることを抑制しつつ、さらにアンダーステアを増大させる必要が無くなったときに、早期にアンダーステアの増大を抑制することが可能となる。
(もっと読む)
車両の運動制御装置
【課題】車両の運動状態が変化して実車挙動観測装置による推定運動状態量の推定演算が中断したときの推定運動状態量の誤差を小さくできる車両の運動制御装置を提供することを課題とする。
【解決手段】実車挙動観測装置302が推定重心すべり角βactを推定する推定演算の代替値となる定常値を算出する定常値算出部302aを備える。そして、実車の運動状態が変化して、実車挙動観測装置302の推定重心すべり角βactの推定演算に不連続点が発生したとき、実車挙動観測装置302は、定常値算出部302aが算出する定常値を代替値とする推定演算によって、推定重心すべり角βactを推定する。
(もっと読む)
運転支援装置
【課題】本発明は、運転支援のための各種のデバイスに故障が発生した場合であっても適切な運転支援を実現する。
【解決手段】運転支援装置1は、車両の運転者に対して、車両の運転におけるリスクの対象となる対象物を回避するために、対象物及び車両の状況に応じて算出された衝突余裕時間及び対象物が車両の予測進路上に移動する可能性の度合いを示す推定危険度に基づき運転支援形態を判定し、判定された運転支援形態に基づき運転支援のための1つ以上のデバイスを制御することにより運転支援を実施する装置であって、デバイスの故障を検出する故障検出部20と、デバイスによる運転支援が安全に寄与する度合いを示す値である安全寄与率と、故障検出手段により検出された故障デバイスに関する情報とに基づき推定危険度を増加させる危険度増分値算出部12、推定危険度判定部13とを備える。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の加速度に基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の運転操作に起因して変動する加速度の変動成分のうち予め定めた特定のノイズ成分を減衰させるノイズ成分除去手段(ブロックB31〜B39)と、そのノイズ成分除去手段によりノイズ成分を減衰させた加速度に基づいて指標を求める走行指標設定手段(ブロックB40)とを設けた。
(もっと読む)
車両の制御装置
【課題】車両の旋回挙動を規定するヨーレート及び車体スリップ角を所望の値に制御する。
【解決手段】前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段を備えた車両を制御する装置は、前記車両の目標運動状態を規定するヨーレート及び車体スリップ角を少なくとも含む車両状態量の目標値を設定する設定手段と、予め設定された、前記車両状態量と前記各々における左右制駆動力差を少なくとも含む状態制御量との相対関係を規定する車両運動モデルに基づいて、前記設定された車両状態量の目標値に対応する前記状態制御量の目標値を決定する決定手段と、前記各々における左右制駆動力差が前記決定された目標値となるように前記制駆動力可変手段を制御する制御手段とを具備する。
(もっと読む)
車両の制御装置
【課題】操舵輪から伝達される操舵反力を迅速且つ正確に推定する。
【解決手段】
前輪及び後輪のうち少なくとも一方の舵角を変化させることが可能な舵角可変手段(200)と、前輪及び後輪のうち少なくとも一方における左右輪の制駆動力差を変化させることが可能な制駆動力可変手段(600)とを備えた車両(10)を制御する装置(100)は、車両の目標運動状態に対応する複数の目標状態量を設定する設定手段と、車両の運動状態が目標運動状態となるように、設定される複数の目標状態量に応じて舵角可変手段及び制駆動力可変手段を制御する運動制御手段と、設定される複数の目標状態量の各々、設定された複数の目標状態量に応じた上記少なくとも一方の舵角及び設定された複数の目標状態量に応じた上記少なくとも一方における左右輪の制駆動力差のうち複数の要素に基づいて、操舵反力を推定する推定手段とを具備する。
(もっと読む)
操舵支援装置
【課題】障害物が移動する場合であっても適切な操舵支援を行うことができる操舵支援装置を提供する。
【解決手段】障害物の位置情報に基づいて障害物を回避するための操舵支援を行う操舵支援装置1であって、障害物が移動物体であるか否かを判定する障害物情報取得部11と、障害物情報取得部11により障害物が移動物体であると判定された場合には、障害物が静止物体である場合に比べて操舵支援の開始タイミングを遅らせる操舵支援タイミング変更部15と、を備えて構成する。
(もっと読む)
車両運動制御装置
【課題】不必要に横転抑制制御が為されることを抑制しつつ、車両状態に対応した横転抑制制御を行うことが可能な車両運動制御装置を提供する。
【解決手段】車両への積載重量に応じて横転抑制制御を許可する基準値となるしきい速度Vtを変化させる。このため、積載重量が大きく、横転し易い車両状態のときには、車速がより低速となっても横転抑制制御が実行されるようにすることができる。これにより、車速が横転傾向情報に応じた速度となるまで横転抑制制御を行うことが可能となる。また、車両への積載が行われていない非積載状態のときにはしきい速度Vtが大きな値となるため、車両が横転する可能性がないような場合にまで不必要に横転抑制制御が実行されてしまうことを抑制することができる。よって、不必要に横転抑制制御が為されることを抑制しつつ、車両状態に対応した横転抑制制御を行うことが可能となる。
(もっと読む)
車両制御装置および車両制御方法
【課題】 運転者に与える違和感を軽減できる車両制御装置および車両制御方法を提供する。
【解決手段】 自車両の走行車線からの逸脱傾向を算出する逸脱傾向算出部20と、逸脱傾向算出部20によって車両の走行車線からの逸脱傾向を検出したときに車両に対してヨーモーメントおよび/または減速度を付与して逸脱傾向を抑制する車線逸脱防止制御部21と、を備え、逸脱傾向算出部20は、曲線路の外側または内側への逸脱傾向を算出し、車線逸脱防止制御部21は、算出された逸脱傾向が外側への逸脱傾向である場合には車線逸脱傾向を抑制し、算出された逸脱傾向が内側への逸脱傾向である場合には逸脱傾向の状態に基づいて車線逸脱傾向の抑制または抑制の制限をする。
(もっと読む)
電子基板の電気接続構造
【課題】基板支持体に対するバスバーの付着性を高めることができ、電子基板とバスバーとの接続の信頼性を高めることができる電気接続構造を提供することを課題とする。
【解決手段】合成樹脂製のハウジング40(基板支持体)に固定された制御基板20(電子基板)に設けられた電気接続パッド24と、ハウジング40に設けられたバスバー81とがボンディングワイヤ82によって電気的に接続される電気接続構造であって、バスバー81は、ハウジング40の表面に露出する露出部81bと、ハウジング40に埋設される埋設部81aと、露出部81bから延出され、電気部品に電気的に接続される接続部81cと、を有し、露出部81bにボンディングワイヤ82の端部が接合され、埋設部81aに切り欠き部81dが形成されている。
(もっと読む)
自動制動制御用ECU、車型学習方法および車両
【課題】自動制動制御用ECUを複数の車型の車両で共通化すること。
【解決手段】複数の異なる車型の車両に搭載され、車両の自動制動制御装置3を制御する自動制動制御用ECU1であって、車型および当該車型に対応するセンサの情報を、これらの情報を保持する車両ECU2から取得して記憶する車型情報学習部10と、車型情報学習部10が記憶した情報に基づいて車両に適合する制動制御パターンを選択する制動制御パターン選択部11と、を有する。
(もっと読む)
電気自動車および制動プログラム
【課題】様々な路面において安全、確実に車両を制動することができる電気自動車および制動プログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、各車輪2のそれぞれに摩擦力による制動力を付与可能な摩擦ブレーキ機構と、各車輪2のスリップ率が所定の値以下のときは、ブレーキペダル13の踏み込み量に応じて機械ブレーキ18の制動力および電気ブレーキの制動力を共に発揮させ、各車輪2のスリップ率のいずれかが所定の値を超えたとき、ブレーキペダル13の踏み込み量に関わらず、所定の値を超えたスリップ率が所定の値以下になるように、電気ブレーキの制動力を制御するとともに、機械ブレーキ18の制動力を段階的に変化させ、又はオンオフ制御する制御装置10とを備える。
(もっと読む)
電気自動車および制動プログラム
【課題】車輪のロックを検出して制動力の制御を行う場合に比較して、制動距離を短くすることができる電気自動車および制動プログラムを提供する。
【解決手段】
前輪側の左右輪2fr,2flと後輪側の左右輪2rr,2rlとを独立に駆動する2つの電気モータ3を有する電気自動車1において、各車輪2のそれぞれに摩擦力による制動力を付与可能な摩擦ブレーキ機構と、運転者のブレーキ操作量に応じて摩擦ブレーキ機構による制動力および電気モータ3による制動力を共に発揮させ、各車輪2の少なくとも何れかのスリップ率が路面の摩擦係数に応じて設定された第1の所定値を超えたとき、ブレーキ操作量に関わらず電気モータ3による制動力を低減し、その後スリップ率が前記第1の所定値よりも低い第2の所定値以下となったとき、電気モータ3による制動力を増加する制御を行う制御装置10とを備える。
(もっと読む)
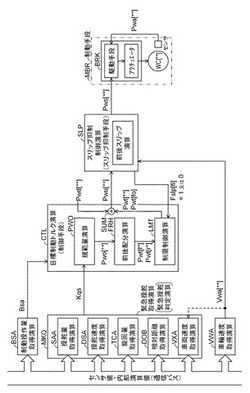
車両の運動制御装置
【課題】車両の操作状態量や運動状態量を検知するセンサからの信号が異常な場合にも、運転者に違和感を与えない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act、実ヨーレートγactを偏差演算部55に入力する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d、規範ヨーレートを算出して偏差演算部55に入力する。仮想外力演算部61は、偏差演算部55から出力される偏差にもとづいて、規範動特性モデル演算部54に仮想外力Mvをフィードバックする。このとき、仮想外力演算制御部62が、前記したセンサからの信号の検知状態にもとづいて、仮想外力の補正を制御する。
(もっと読む)
141 - 160 / 774
[ Back to top ]