
Fターム[3D246HA81]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | ヨーレート (774)
Fターム[3D246HA81]に分類される特許
81 - 100 / 774
ブレーキ制御装置
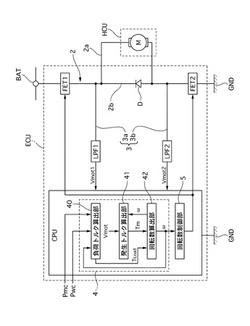
【課題】モータ回転数の推定誤差を低減することができる装置を提供すること。
【解決手段】モータMの端子間電圧VmotとモータMの特性に基づいてモータMの回転数を推定するモータ回転数推定部4を有するコントロールユニットCPUを備えた。ブレーキ回路内のブレーキ液を流動させるポンプPを回転駆動するモータMの回転数ωを推定する際、モータ端子間電圧VmotとモータMの特性(イナーシャIや容積効率η等の諸元、及びトルク−回転数特性)に基づいて推定する。
(もっと読む)
車両用制動力制御装置

【課題】制動力の前後輪配分を制御する際の車両の余分なヨーレートに起因するふらつきを防止する。
【解決手段】制動時に後輪の車輪速度が前輪の車輪速度よりも車輪速度の目標相違量高い後輪の目標車輪速度になるよう左右後輪の制動力を個別に制御することにより制動力の前後輪配分制御を行う車両用制動力制御装置。前輪に対する後輪の目標車輪速度Vwrtを演算し(S100)、接地荷重増大側の後輪の目標車輪速度が接地荷重減少側の後輪の目標車輪速度に比して低くなるよう、車両のロールレートφdに基づいて後輪の目標車輪速度を補正することにより、左右後輪の目標車輪速度Vwrlt及びVwrrtを演算する(S150〜600)。そして左右後輪の車輪速度が目標車輪速度になるよう制動力を制御する(S950)。
(もっと読む)
車両の横方向運動制御装置
【課題】 車両挙動を安定化させつつ横方向運動制御を停止させることができる横方向運動制御装置を提供すること。
【解決手段】 横方向運動制御装置は、車両の横方向運動量の目標値に基づいて、車両の横方向運動量を変化させるために協調して作動する複数の制御対象の横方向運動制御量を演算し、演算した横方向運動制御量に基づいて複数の前記制御対象を制御する。また、複数の前記制御対象の制御を停止するか否かを判断する。複数の前記制御対象の制御を停止すると判断したときに、そのときから複数の前記制御対象の横方向運動制御量が縮退するように、複数の前記制御対象の横方向運動縮退制御量をそれぞれ決定し、決定した横方向運動縮退制御量に基づいて複数の前記制御対象を制御する。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をVLP、より詳しくはVLPのF/F演算部6やF/B演算部7に伝え、アベイラビリティに基づいて車両横方向運動制御に使用する制御対象の優先順位を決定する。このように、各制御対象のアベイラビリティを加味して車両横方向運動制御に使用する制御対象の優先順位を決定しているため、制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
(もっと読む)
運動量制御装置
【課題】 制御対象の運動状態が安定するように設定されたフィードバックゲインを用いて制御対象の運動量をフィードバック制御する運動量制御装置を提供すること。
【解決手段】 運動量制御装置は、複数のアクチュエータのうちの一つのアクチュエータを単独で作動させることにより制御対象の運動量をフィードバック制御した場合に用いる最適フィードバックゲインを、複数のアクチュエータのそれぞれが単独で作動した場合についてそれぞれ取得する最適フィードバックゲイン取得部と、最適フィードバックゲイン取得部により取得された複数の最適フィードバックゲインのうち最小のフィードバックゲインを制御系のフィードバックゲインとして設定するフィードバックゲイン設定部とを備える。
(もっと読む)
車両運動制御装置およびそれを有する車両運動制御システム
【課題】制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をアベイラビリティ演算部5から制御要求部1に対して伝える。これにより、各アプリケーションでアベイラビリティ情報を踏まえて、性能限界を超えない制御要求を生成することが可能となり、制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することが可能となる。
(もっと読む)
車両運動制御システム
【課題】アプリケーションからの制御目標値に応じて制御プラットフォームが制御対象を最適制御する構造において、意図しない車両挙動が生じることを防止する。
【解決手段】制御目標値・アベイラビリティ比較部8にて、アベイラビリティ演算部5から伝えられるアベイラビリティ情報と制御要求部2などから伝えられる制御目標値とを比較し、その比較結果に基づいて車両横方向運動制御を実行するか否かを決める。これにより、アプリケーション1〜nや制御プラットフォームでのソフト的な異常による演算の誤りや、制御対象の制御に用いられるACT16〜19の異常、車両状態(例えば、路面μ)の急激な変化により、大きな車両の異常挙動を引き起こすことを防止できる。
(もっと読む)
車両の挙動制御装置及び車両の挙動制御方法
【課題】車両の挙動を制御させるための複数の制御対象の制御要求値を適切に設定することができる車両の挙動制御装置及び車両の挙動制御方法を提供する。
【解決手段】要求値設定部26は、第1の制御対象に対する第1要求ヨーレートγ_act1を設定する第1要求値設定部40と、第1要求ヨーレートγ_act1に基づき駆動する第1の制御対象の第1ヨーレート推定値γs_act1を取得する第1推定値取得部41と、第1定常不足量TF1及び第1推定遅れ量SF1のうち少なくとも第1推定遅れ量SF1を算出する第1算出部42と、第2の制御対象に対する第2要求ヨーレートγ_act2を設定する第2要求値設定部43と、第2要求ヨーレートγ_act2に基づき駆動する第2の制御対象の第2ヨーレート推定値γs_act2を取得する第2推定値取得部44とを備えている。
(もっと読む)
車両運動制御装置
【課題】より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、アプリ要求や車両状態およびアベイラビリティ演算部5で演算された各制御対象のアベイラビリティを優先順位決定条件として用い、この優先順位決定条件に基づいて、制御対象の選択タイミングを判定する。すなわち、アプリ要求が出されて最初に制御対象が選択されたのち、制御対象を選択するときの優先順位を決定する条件であるアプリ要求や車両情報もしくは各制御対象のアベイラビリティが変化したときに、それに基づいて選択制御対象を再考させる。これにより、より最適な制御対象を選択して車両横方向運動制御を円滑に行うことが可能となる。
(もっと読む)
車両の横方向運動制御装置
【課題】 横方向運動制御中にドライバの操舵意図の有無を精度良く判断する。
【解決手段】 横方向運動制御装置は、車両のドライバの操舵意図の有無を判断する操舵意図判断部を備え、操舵意図判断部により操舵意図が有ると判断されたときに、制御対象制御部による制御対象の制御を停止する。また、操舵意図判断部は、車両のドライバによる操舵操作量を取得する操舵状態量取得部と、目標値に基づいて操舵操作量の閾値を設定する閾値設定部と、を備える。操舵意図判断部は、操舵操作量取得部により取得された操舵操作量の大きさと閾値設定部により設定された閾値とを比較することにより、操舵意図の有無を判断する。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】アベイラビリティ演算部5にて、アプリ情報に含まれるアプリケーションの要求に応じたアベイラビリティ変更や車両情報に応じたアベイラビリティ変更が行われるようにする。これにより、アプリケーションの要求や車両情報を反映して各制御対象のアベイラビリティを変更することが可能となり、より適切な制御対象を選択してアプリケーションの要求や車両情報に忠実な車両横方向運動制御を実行することが可能となる。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】F/B演算部7での制御対象の選択について、各制御対象のアベイラビリティである最大制御量から各制御対象のF/F要求値を引いた差から各制御対象の余裕度を演算し、この余裕度に基づいて行うようにする。これにより、余裕度がF/B要求値よりも大きな制御対象を選択して車両横方向運動制御を実行することが可能となる。したがって、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
(もっと読む)
車両の制駆動力制御装置
【課題】 従動輪の制動力および駆動輪の制駆動力を制御し、車両を適切に走行させるとともに車両の挙動を制御する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、センサ31,32,33から入力した各検出値に基づいて車両Veの挙動を制御するために各輪11〜14が発生すべき前後力Ffl,Ffr,Frl,Frrを演算する。ユニット30は、従動輪11,12側の前後力Ffl、Ffrの大きさを比較し、大きい方の前後力が駆動力であるか否かを判定する。そして、ユニット30は、大きい方の前後力が駆動力であるときにこの前後力を用いてオフセット前後力FOSを演算し、従動輪11,12の前後力Ffl、Ffrから前後力FOSを減算するとともに駆動輪13,14の前後力Frl,Frrに前後力FOSを加算して、左右前輪11,12および左右後輪13,14の目標前後力Fdfl,Fdfr,Fdrl,Fdrrを演算する。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】既存のポンプを用いた安価な回路を用いて、フルアーティキュレート状態でなくても小旋回ブレーキモードを起動させることで多くのハンドル旋回操作を不要としたアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】小旋回スイッチがオンの状態で後車体に対し前車体を屈折させるハンドル旋回操作があると、コントローラは、電磁弁56A,56Bを閉じて左ブレーキ回路41と右ブレーキ回路42間を遮断するとともに、電磁比例リリーフ弁62のリリーフ圧を無負荷状態から設定圧までの範囲内でアーティキュレート角に応じた圧に制御することで、プライオリティバルブ59をシフトさせて、ポンプ57からバケット作業機回路60aへの流量より小旋回圧供給回路60への流量を優先させるとともに、電磁比例リリーフ弁62に基づいて小旋回圧供給回路60の圧力を制御し、左旋回の場合は左小旋回制御弁63のみを弁開状態に制御する。
(もっと読む)
車両の制駆動力制御装置
【課題】駆動輪の制駆動力を制御して車両を適切に走行させるとともに車体に発生する複数の挙動を同時に制御する車両の制駆動力制御装置を提供すること。
【解決手段】電子制御ユニットにおいては、入力部41がセンサ31,32,33から各検出値を入力し、車体挙動制御指令値演算部42が目標前後駆動力FX、目標ロールモーメントMx、目標ピッチモーメントMyおよび目標ヨーモーメントMzを演算する。そして、駆動力配分演算部43は駆動力FX、モーメントMx,My,Mzを同時に実現するように配分して各輪に発生させる左前駆動力Ffl、右前駆動力Ffr、左後駆動力Frlおよび右後駆動力Frrを演算する。さらに、各輪モータトルク指令値演算部44は演算部43によって演算された駆動力Ffl,Ffr, Frl,Frrに対応して各インホイールモータ19〜22が発生すべきモータトルクTfl,Tfr,Trl,Trrを演算する。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】簡単な構成のブレーキ圧発生回路を用いて、フルアーティキュレート状態でなくても小旋回ブレーキモードを起動することで多くのハンドル旋回操作を不要としたアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】小旋回スイッチがオンの状態で後車体に対し前車体を屈折させるハンドル旋回操作があると、コントローラは、電磁弁56A,56Bを閉じて左ブレーキ回路41と右ブレーキ回路42間を遮断するとともに、旋回内側に対応する左小旋回制御弁63または右小旋回制御弁64の一方を弁開状態に制御する。これらの制御弁63または64の一方を経て、小旋回用ポンプ57から吐出して小旋回圧供給通路60に供給するブレーキ圧油を、電磁比例リリーフ弁62によって無負荷状態から設定圧までの範囲内でアーティキュレート角に応じた圧に制御し、旋回内輪側に対応する左ブレーキ回路41または右ブレーキ回路42の一方に供給する。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】既存のポンプを利用した安価な回路を用いて、フルアーティキュレート状態でなくても小旋回ブレーキモードを発揮させることで多くのハンドル旋回操作を不要としたアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】小旋回スイッチがオンの状態で後車体に対し前車体を屈折させるハンドル旋回操作があると、コントローラは、電磁弁56A,56Bを閉じて左ブレーキ回路41と右ブレーキ回路42間を遮断するとともに、方向切換弁59を切換えて、ポンプ57を他の回路60aから小旋回圧供給回路60に切換える。旋回内側に対応する左小旋回用比例減圧弁63または右小旋回用比例減圧弁64の一方を弁開状態に制御するとともに、電磁弁66を弁開状態に制御して、アキュームレータ62内に蓄えられた作動油を、左ブレーキ回路41または右ブレーキ回路42の一方に供給する。
(もっと読む)
衝突被害軽減制動制御装置
【課題】衝突発生時の被害の軽減化を図りつつ自動制動による操作性の低下の抑制を図る上で有利な衝突被害軽減制動制御装置を提供する。
【解決手段】制動制御手段44は、衝突判断手段40によって衝突が不可避であると判断された場合に、ブレーキアクチュエータ34を介してブレーキ装置32を作動させ、自車両2の自動制動を実行するものである。また、制動制御手段44は、車線逸脱判断手段36により自車両2が逸脱傾向にあると判断され、かつ、衝突可能性判断手段38により衝突可能性有りと判断されるという自動制動早期化条件が成立した場合に、衝突判断手段40の判断結果を待つことなく自動制動を実行するものである。
(もっと読む)
車両の走行制御装置
【課題】旋回内輪の前後力を低減することにより旋回外輪に比して旋回内輪の前後力を小さくする旋回補助制御に於いて、車両の旋回性能の向上と車両の駆動性能や安定性の向上とを両立させる。
【解決手段】旋回内輪の前後力の低減量が目標低減量になるよう旋回内輪の前後力を低減し、所定の頻度にて所定の時間に亘り旋回内輪の前後力の低減量を目標低減量よりも小さくする。そして車両の駆動性能や車両の安定性を向上させる必要性が高いときには該必要性が低いときに比して、旋回補助制御中に於ける旋回内輪の前後力の積分値が大きくなるよう、必要性に応じて所定の頻度、所定の時間、低減量を小さくする量の少なくとも一つを変化させる。
(もっと読む)
ブレーキ制御装置
【課題】左右のブレーキ装置のブレーキドラムとブレーキシューとのクリアランスが異なる場合にもブレーキ作動時に車両を安定させるブレーキ制御装置を構成する。
【解決手段】直進状態で運転者によるブレーキ操作により停車した際のヨーレートからクリアランス左右差取得手段34が左右のブレーキ装置のクリアランスの左右差に相当するクリアランス値CLEを取得し、記憶手段35が記憶する。次に、閾値設定手段36がクリアランス値CLEからブレーキ装置の自動操作を開始する閾値を設定する。車両を旋回させる場合には旋回安定化制御部31が、旋回外側のブレーキ装置に設定された閾値まで横加速度センサ22の検出信号Gyが達したタイミングでブレーキ装置の自動作動を開始する。
(もっと読む)
81 - 100 / 774
[ Back to top ]