
Fターム[3D246HA81]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | ヨーレート (774)
Fターム[3D246HA81]に分類される特許
21 - 40 / 774
前後加速度推定装置
【課題】車両の前後加速度又は路面摩擦係数若しくは路面状態の推定精度を向上させることが可能な前後加速度推定装置を提供する。
【解決手段】前後加速度推定装置22は、加速操作又は減速操作の開始時点における前後加速度センサ42の検出値と、その後の前後加速度センサ42の検出値との差を、車両10の前後加速度の推定値として算出する加速度推定手段110を有する。
(もっと読む)
制動力制御装置

【課題】路面推定の精度を向上させることが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12では、前後Gセンサ42が検出した車両10の前後加速度である前後G検出値に基づいて路面推定を行う路面推定手段110と、ホイールシリンダ62a〜62dにかかるブレーキ液圧を増圧、減圧又は保持させることで、車輪18のロックを防止するアンチロック制御手段112とを備える。路面推定手段110は、アンチロック制御中に前記ブレーキ液圧が増圧又は増圧保持となっている車輪18の数に応じて前記前後G検出値を補正した前後G補正値に基づいて路面推定を行う。
(もっと読む)
車両旋回挙動制御装置
【課題】ステア特性に影響を与える左右輪間に作用させるべき差動制限力を調整する差動制限手段と、車輪への制動力を調整するブレーキ装置とを協調制御することで、車両の走行状態に関わらず、良好な車両の姿勢制御を行う。
【解決手段】前後左右輪を備えた車両1に付加すべき要求ヨーモーメント演算手段41、前輪または後輪の左右輪に対する駆動力を調整する第1のヨー運動調整手段、前輪または後輪の少なくとも一方における左右輪に対するブレーキ装置の制動力を調整する第2のヨー運動調整手段33、車両の旋回時の旋回内輪スリップ検出手段43、ヨー運動調整手段を制御する車両の旋回状態制御手段44を有し、旋回状態制御手段は、スリップ検出手段の検出結果に基づき、第1のヨー運動調整手段による駆動力差の調整と第2のヨー運動調整手段による駆動力差の調整を行い、要求ヨーモーメントへの第1および第2のヨー運動調整手段の寄与率を制御する。
(もっと読む)
車両トレーラに接続される牽引車を制御する方法及びシステム
【課題】トレーラを牽引する牽引車を制御するための、改善された方法及びシステムを提供する。
【解決手段】車両トレーラ102に接続されている牽引車100を制御する方法、及び当該方法を使用するシステム。本方法は、車両目標のセット及び当該車両目標のセットに応答する車両状態のセットを検知することを含む。本方法は、車両目標のセットと車両状態のセットとの間の複数の差を求めること、当該複数の差の傾向を求めること、当該傾向に基づいて対称信号及び非対称信号のうちの少なくとも一方を生成すること、並びに、当該対称信号及び非対称信号のうちの少なくとも一方を用いて車両システムを作動させることも含む。
(もっと読む)
ブレーキ制御装置
【課題】構造をより簡単化できるブレーキ制御装置を提供する。
【解決手段】回生制動装置を備えた車両に用いられるブレーキ装置であって、ブレーキ操作状態検出部5と、第1ブレーキ回路11Pと、第2ブレーキ回路19Pと、第3ブレーキ回路21FLと、第4ブレーキ回路22Pと、ポンプP、流入弁、流出弁、リザーバ24P、と第4ブレーキ回路上であって、リザーバと第3ブレーキ回路との接続位置との間に設けられ、回生制動装置の作動状態に応じて作動するカットオフ弁28Pを備えた。
(もっと読む)
車両状態検出装置
【課題】車両に設置されたカメラ20で撮像された画像データに基づいて、自車両の状態を検出する車両状態検出装置であって、その検出精度を向上させることを目的とする。
【解決手段】制御装置10(CPU11)は、カメラ20で撮像された複数の画像データを取得して、この複数の画像データの夫々において特徴点を抽出し、時間的に連続する画像データにおいて、特徴点の位置を追跡処理することによって複数のオプティカルフローを導出する(S10〜S30)。そして、導出された複数のオプティカルフローにおいて、方向と大きさの両方が同じであるオプティカルフロー同士を一つのグループに分類するとともに、オプティカルフローが最も多く含まれるグループのオプティカルフローを、自車両に対応する自車オプティカルフローとして選択し、選択された自車オプティカルフローに基づいて自車両の状態を検出する(S50〜S70)。
(もっと読む)
ブレーキ制御装置
【課題】回生制動力から摩擦制動力へのすり替えの応答性をより高めることができるブレーキ制御装置を提供する。
【解決手段】ブレーキ回路(管路22P,22S,25FL,25FR)上であってソレノイドアウトバルブ26FL,26FRよりもポンプPの吸入部10aに設けられると共に、ブレーキ回路(管路21P,21S,22P,22S)に接続するリザーバ24P,24Sと、ポンプMP、MSが回転駆動されているときに吐出弁20P,20Sからのブレーキ液の吐出を制限するポンプ吸入遮断バルブ29P,29Sと、を備えた。
(もっと読む)
衝突危険度判定装置
【課題】衝突危険度を精度よく判定する。
【解決手段】衝突危険度判定装置100では、環境検出部5bにより移動物の位置分布及び移動状態分布を検出し、マップ生成部5cにより存在可能度マップを生成する。移動物生成部5d、位置更新部5e及び分布変更部5fにより、存在可能度マップ上にて移動物の将来位置分布を予測する。進路候補演算部5aにより、自車両10の進路候補を複数演算する。危険度候補演算部5hにより、存在可能度マップ上で複数の進路候補それぞれの衝突危険度候補を演算する。そして、危険度判定部5iにより、演算された複数の衝突危険度候補に基づき複数の進路候補のうち一の進路候補を選択し、選択した当該一の進路候補の衝突危険度候補を衝突危険度として判定する。ここで、危険度候補演算部5hは、移動コストと運動コストと衝突確率とに基づき衝突危険度候補を演算する。
(もっと読む)
制駆動力制御装置および制駆動力制御方法
【課題】制駆動力による車体の制振制御を操舵状態に応じてより適切に行うこと。
【解決手段】車両の走行状況に基づいて、車体のバネ上挙動を推定する挙動推定手段と、推定した車体のバネ上挙動に応じて、車両の荷重を安定化させるための荷重安定化補正トルクを算出する荷重安定化補正トルク算出手段と、推定した車体のバネ上挙動に応じて、車両の荷重を付加するための荷重付加補正トルクを算出する荷重付加補正トルク算出手段と、荷重安定化補正トルクおよび荷重付加補正トルクに基づいて、制駆動トルクを補正する制御にハンチングが発生しているか否かを判定するハンチング判定手段と、車両における操舵状態と、ハンチング判定手段の判定結果とに基づいて、荷重安定化補正トルクおよび荷重付加補正トルクの付与度合いを決定する運動ゲインを算出する運動ゲイン算出手段とを有する制駆動力制御装置とした。
(もっと読む)
ブレーキ装置
【課題】ブレーキ装置において、ノックバックによる応答性の低下を防止しつつ、ディスクロータ及びブレーキパッドの偏摩耗を防止する。
【解決手段】通常は、ブレーキペダル19の操作によってマスタシリンダ4で発生した液圧をディスクブレーキ2に直接供給して制動力を発生させる。また、コントローラ14によって液圧ポンプモータ7を作動させてディスクブレーキ2に液圧を供給することによって制動力を発生させることができる。急旋回等によってノックバックが生じた場合、ピストン16の後退を許容することにより、ブレーキパッド17及びディスクロータ18の偏摩耗を防止する。その後、ノックバックの要因が解除されたとき、コントローラ14によって液圧ポンプモータ7を作動させ、ピストン16を前進させてパッドクリアランスを調整することにより、応答性の低下を防止する。
(もっと読む)
運転支援装置
【課題】複数の物体の近傍を通過する際に運転者にとって違和感の少ない運転支援を行うことができる運転支援装置を提供する。
【解決手段】本発明は、自車両前方の物体を検出する道路構造認識部11及び物体検出部13と、物体の近傍を通過する際の上限通過速度を算出する上限通過速度算出部14と、上限通過速度に基づいて自車両Mの速度制御軌道SRを生成する速度制御軌道生成部17と、速度制御軌道SRに基づいて自車両Mの運転支援を実行する運転支援部18と、を備え、速度制御軌道生成部17は、複数の物体が検出された場合、自車両Mの進行方向Pにおける物体の密度ρに基づいて速度制御軌道SRを生成することを特徴とする。
(もっと読む)
ブレーキ制御装置
【課題】ドライバのブレーキ操作を反映でき、かつ、ブレーキフィーリングに影響を与えなくてもノックバック現象を抑制できるようにする。
【解決手段】ノックバックが発生する可能性の有無を判定し、ノックバック可能性ありと判定されたときには、EPBを駆動することでノックバックによる不具合が解消できるようにする。すなわち、モータ10を逆回転させて推進軸18を後退させることで推進軸18の先端をピストン19の底部から離間させられるようにし、ノックバック可能性がなくなったら、モータ10を正回転させて推進軸18を前進させることでピストン19を通常時の位置に戻すピストン補正移動を行ったのち、その後再度、推進軸18を後退させることで待機位置に戻す待機位置移動を行うようにする。
(もっと読む)
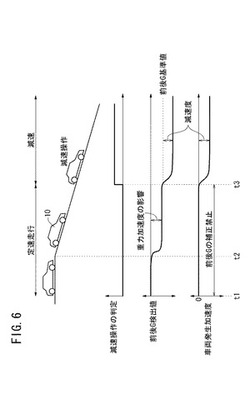
車両の運動制御装置
【課題】車両がカーブに進入する際において運転者が受ける安心感が考慮されて減速制御が実行される車両の運動制御装置を提供すること。
【解決手段】この装置では、運転者の安心感に影響を与える、カーブの曲率半径、登降坂勾配(上り・下り勾配)、ブラインドカーブ、及び勾配急減部分の4つの観点が考慮されて許容横加速度基準値Gyaが補正されて許容横加速度Gyoが演算・調整される。この調整された許容横加速度とカーブの曲率半径とに基づいてカーブを通過する際における適正車速が決定される。そして、所定の減速制御開始条件が成立すると、運転者の加減速操作の有無にかかわらず、減速制御が開始・実行されて、車速が上記適正車速まで減速される。このように、運転者の安心感が考慮されて許容横加速度(従って、適正車速)が決定されるから、運転者に違和感を与えることなく、減速制御が実行され得る。
(もっと読む)
走行支援装置及び方法
【課題】運転者の意図によって1次操舵後に2次操舵を行う場合に、不要な支援を低減する技術を提供する。
【解決手段】車輌の走行可能な走路からの車輌逸脱時に、車輌を前記走路内で走行させるように警告又は補助の支援を行う走行支援装置であって、1次操舵量が前記支援を停止するか否かの閾値となる第1所定量を超えたことにより、前記支援を停止しているときに、さらに2次操舵量が前記支援の停止を延長するか否かの閾値となる第2所定量を超える場合には、前記支援の停止を延長する。
(もっと読む)
先行車追従走行装置
【課題】燃費の悪化が抑制でき、且つ、先行車に対する追従性も良好な先行車追従走行装置を提供する。
【解決手段】先行車追従制御において、摩擦ブレーキ開始閾値式(L1)、エンジンブレーキ開始閾値式(L2)、加速制御終了閾値式(L3)を用いて、摩擦ブレーキ開始閾値、エンジンブレーキ開始閾値、加速制御終了閾値を逐次算出する。そして、エンジンブレーキ開始閾値と加速制御終了閾値の間を等速領域とし、KdB_cの現在値が等速領域にあれば等速制御を行う。等速制御を行うことができる結果、加減速の頻度が低下するので、燃費の悪化が抑制できる。また、減速の頻度が少なくなることにより、割り込み車が加速した場合や、先行車が減速後、再加速した場合に、先行車に追従するための加速が少なくて済むので、追従性も良好となる。
(もっと読む)
車両のブレーキ制御装置
【課題】車両旋回時の車体の姿勢変化を早期に検知して姿勢変化を早期に抑制することによって車両の走行安定性を高めることができる車両のブレーキ制御装置を提供すること。
【解決手段】車輪速センサ17によって検出される各車輪5L,5R,6L,6Rの速度と操舵角センサ21によって検出された操舵角に基づいて算出される目標ヨーレートとヨーレートセンサ20によって検出される実ヨーレートとの偏差が閾値を超えるとオーバーステアと判断して旋回外側の駆動輪(前輪5L,5R))にアクティブブレーキを掛けることによって旋回時の車体の姿勢変化を抑制するスタビリティ制御を行う車両のブレーキ制御装置(ECU16)において、旋回内側の非駆動輪(後輪6L,6R)の浮き上がりが検出されると、前記スタビリティ制御を開始する目標ヨーレートと実ヨーレートとの偏差の閾値を小さい値に変更する。
(もっと読む)
制動力制御装置
【課題】緊急停止時に車両の移動を速やかに規制することが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12は、車両10の駐車時に車両10の移動を規制する移動規制手段22、62a〜62dを備える。移動規制手段22、62a〜62dは、緊急ブレーキ制御手段118が作動して車両10が停車したと判定したとき、運転者による駐車操作がなくても、車両10の移動を規制する。
(もっと読む)
制動力制御装置
【課題】車両をより早く減速させることが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12では、車体速度Vv若しくは車輪速度Vw又はこれらの目標値が所定速度以下であり、且つ緊急ブレーキ制御手段118による緊急ブレーキ及びアンチロックブレーキ制御手段110によるアンチロックブレーキが作動しているとき、前記アンチロックブレーキによるブレーキ液圧の減少を抑制する。
(もっと読む)
加加速度情報を用いた車両の運動制御装置および方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度を検出する第1の検出手段と、車両の横方向の加加速度を検出する第2の検出手段と、を有し、前記制御手段は、前記第2の検出手段により検出した車両の横方向の加加速度(Gy_dot)を、前記第1の検出手段により検出した車両の前後方向の速度(V)で除した車両のヨー角加速度(r_ref_dot)に基づいて車両のヨーモーメントの制御指令を生成し、前記制御指令を出力する車両の運動制御装置。
(もっと読む)
車両の駆動輪に働く駆動力を制限する駆動力制限装置
【課題】推定速度の精度を向上可能な駆動力制限装置を提供すること。
【解決手段】車両の駆動輪に働く駆動力を制限する駆動力制限装置は、前記車両の第1の加速度を補正して、補正された前記第1の加速度を第2の加速度として得る加速度補正部と、前記駆動輪の車輪速度及び前記第1の加速度に基づき前記車両の第1の速度を算出する第1の算出部と、前記車輪速度及び前記第2の加速度に基づき前記車両の第2の速度を算出する第2の算出部と、前記第1の速度と前記第2の速度との差が第1の閾値以上である場合、前記駆動力を制限する制限駆動力を要求する要求部と、前記第2の速度を前記車両の推定速度として用いる推定部と、を備える。前記要求部が前記制限駆動力を要求することによって、前記車輪速度が第2の閾値を下回る時、前記推定部は、前記第2の速度を前記第1の速度でリセットして前記推定速度を得る。
(もっと読む)
21 - 40 / 774
[ Back to top ]