
Fターム[3D246HA83]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 車体スリップ角 (59)
Fターム[3D246HA83]に分類される特許
1 - 20 / 59
車両用姿勢制御装置
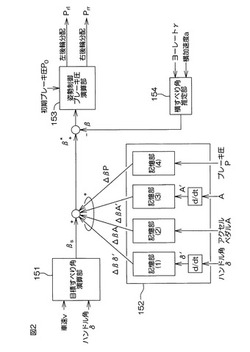
【課題】ペダルの踏み込み量、ハンドル操舵量などを考慮して車両の姿勢制御を行うことにより、ドライバの意図するとおりの旋回走行をアシストすることができる車両用姿勢制御装置を提供する。
【解決手段】操舵角δと車速vとに基づいて、車両旋回時の目標横すべり角βsを算出する目標横すべり角演算部151と、操舵角速度δ′、アクセルペダルの踏み込み量A、アクセルペダルの踏み込み速度A′、フットブレーキペダルの踏み込み量Bの中から選択される少なくとも1つに対応して算出される横すべり角補正量Δβを用いて、前記目標横すべり角演算部151によって算出された目標横すべり角βsを補正する目標横すべり角補正部152と、前記目標横すべり角補正部152によって補正された目標横すべり角β*を用いて車両の姿勢制御を行う。
(もっと読む)
車両トレーラに接続される牽引車を制御する方法及びシステム

【課題】トレーラを牽引する牽引車を制御するための、改善された方法及びシステムを提供する。
【解決手段】車両トレーラ102に接続されている牽引車100を制御する方法、及び当該方法を使用するシステム。本方法は、車両目標のセット及び当該車両目標のセットに応答する車両状態のセットを検知することを含む。本方法は、車両目標のセットと車両状態のセットとの間の複数の差を求めること、当該複数の差の傾向を求めること、当該傾向に基づいて対称信号及び非対称信号のうちの少なくとも一方を生成すること、並びに、当該対称信号及び非対称信号のうちの少なくとも一方を用いて車両システムを作動させることも含む。
(もっと読む)
制駆動力制御装置および制駆動力制御方法
【課題】制駆動力による車体の制振制御を操舵状態に応じてより適切に行うこと。
【解決手段】車両の走行状況に基づいて、車体のバネ上挙動を推定する挙動推定手段と、推定した車体のバネ上挙動に応じて、車両の荷重を安定化させるための荷重安定化補正トルクを算出する荷重安定化補正トルク算出手段と、推定した車体のバネ上挙動に応じて、車両の荷重を付加するための荷重付加補正トルクを算出する荷重付加補正トルク算出手段と、荷重安定化補正トルクおよび荷重付加補正トルクに基づいて、制駆動トルクを補正する制御にハンチングが発生しているか否かを判定するハンチング判定手段と、車両における操舵状態と、ハンチング判定手段の判定結果とに基づいて、荷重安定化補正トルクおよび荷重付加補正トルクの付与度合いを決定する運動ゲインを算出する運動ゲイン算出手段とを有する制駆動力制御装置とした。
(もっと読む)
車両の挙動制御装置及び車両の挙動制御方法
【課題】車両の挙動を制御させるための複数の制御対象の制御要求値を適切に設定することができる車両の挙動制御装置及び車両の挙動制御方法を提供する。
【解決手段】要求値設定部26は、第1の制御対象に対する第1要求ヨーレートγ_act1を設定する第1要求値設定部40と、第1要求ヨーレートγ_act1に基づき駆動する第1の制御対象の第1ヨーレート推定値γs_act1を取得する第1推定値取得部41と、第1定常不足量TF1及び第1推定遅れ量SF1のうち少なくとも第1推定遅れ量SF1を算出する第1算出部42と、第2の制御対象に対する第2要求ヨーレートγ_act2を設定する第2要求値設定部43と、第2要求ヨーレートγ_act2に基づき駆動する第2の制御対象の第2ヨーレート推定値γs_act2を取得する第2推定値取得部44とを備えている。
(もっと読む)
車両運動制御システム
【課題】アプリケーションからの制御目標値に応じて制御プラットフォームが制御対象を最適制御する構造において、意図しない車両挙動が生じることを防止する。
【解決手段】制御目標値・アベイラビリティ比較部8にて、アベイラビリティ演算部5から伝えられるアベイラビリティ情報と制御要求部2などから伝えられる制御目標値とを比較し、その比較結果に基づいて車両横方向運動制御を実行するか否かを決める。これにより、アプリケーション1〜nや制御プラットフォームでのソフト的な異常による演算の誤りや、制御対象の制御に用いられるACT16〜19の異常、車両状態(例えば、路面μ)の急激な変化により、大きな車両の異常挙動を引き起こすことを防止できる。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】既存のポンプを用いた安価な回路を用いて、フルアーティキュレート状態でなくても小旋回ブレーキモードを起動させることで多くのハンドル旋回操作を不要としたアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】小旋回スイッチがオンの状態で後車体に対し前車体を屈折させるハンドル旋回操作があると、コントローラは、電磁弁56A,56Bを閉じて左ブレーキ回路41と右ブレーキ回路42間を遮断するとともに、電磁比例リリーフ弁62のリリーフ圧を無負荷状態から設定圧までの範囲内でアーティキュレート角に応じた圧に制御することで、プライオリティバルブ59をシフトさせて、ポンプ57からバケット作業機回路60aへの流量より小旋回圧供給回路60への流量を優先させるとともに、電磁比例リリーフ弁62に基づいて小旋回圧供給回路60の圧力を制御し、左旋回の場合は左小旋回制御弁63のみを弁開状態に制御する。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】既存のポンプを利用した安価な回路を用いて、フルアーティキュレート状態でなくても小旋回ブレーキモードを発揮させることで多くのハンドル旋回操作を不要としたアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】小旋回スイッチがオンの状態で後車体に対し前車体を屈折させるハンドル旋回操作があると、コントローラは、電磁弁56A,56Bを閉じて左ブレーキ回路41と右ブレーキ回路42間を遮断するとともに、方向切換弁59を切換えて、ポンプ57を他の回路60aから小旋回圧供給回路60に切換える。旋回内側に対応する左小旋回用比例減圧弁63または右小旋回用比例減圧弁64の一方を弁開状態に制御するとともに、電磁弁66を弁開状態に制御して、アキュームレータ62内に蓄えられた作動油を、左ブレーキ回路41または右ブレーキ回路42の一方に供給する。
(もっと読む)
ブレーキ制御装置
【課題】車両の状態に応じたブレーキアシストが可能なブレーキ制御装置を提供すること。
【解決手段】本発明のブレーキ制御装置では、横加速度とヨーレイトとに基づいて各輪に対する制動力の配分量を算出する第1制動力配分算出部と、ロール挙動に基づいて各輪に対する制動力の配分量を算出する第2制動力配分算出部と、車両挙動に応じて前記第1制動力配分算出部による配分量と、前記第2制動力配分算出部による配分量とを選択して制動力配分制御を行うこととした。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供することを課題とする。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値βlmtuと下限値βlmtdの間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値βlmtuより大きくなることおよび下限値βlmtdより小さくなることを防止する。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供する。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値と下限値の間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値より大きくなることおよび下限値より小さくなることを防止する。
(もっと読む)
車両の運動制御装置
【課題】車両の運動状態が変化して実車挙動観測装置による推定運動状態量の推定演算が中断したときの推定運動状態量の誤差を小さくできる車両の運動制御装置を提供することを課題とする。
【解決手段】実車挙動観測装置302が推定重心すべり角βactを推定する推定演算の代替値となる定常値を算出する定常値算出部302aを備える。そして、実車の運動状態が変化して、実車挙動観測装置302の推定重心すべり角βactの推定演算に不連続点が発生したとき、実車挙動観測装置302は、定常値算出部302aが算出する定常値を代替値とする推定演算によって、推定重心すべり角βactを推定する。
(もっと読む)
車両の制御装置
【課題】車両の旋回挙動を規定するヨーレート及び車体スリップ角を所望の値に制御する。
【解決手段】前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段を備えた車両を制御する装置は、前記車両の目標運動状態を規定するヨーレート及び車体スリップ角を少なくとも含む車両状態量の目標値を設定する設定手段と、予め設定された、前記車両状態量と前記各々における左右制駆動力差を少なくとも含む状態制御量との相対関係を規定する車両運動モデルに基づいて、前記設定された車両状態量の目標値に対応する前記状態制御量の目標値を決定する決定手段と、前記各々における左右制駆動力差が前記決定された目標値となるように前記制駆動力可変手段を制御する制御手段とを具備する。
(もっと読む)
車両の運動制御装置
【課題】実車挙動観測装置が推定する推定運動状態量の誤差が大きい場合であっても運転者が受ける違和感を軽減できる車両の制御装置を提供することを課題とする。
【解決手段】実車1に備わるヨーモーメント制御量算出部37aが算出して規範モデル301に入力する仮想外力MVFBの成分のうち、すべり角偏差βerrを含んだβ成分の大きさが、ヨーレート偏差γerrを含んだγ成分の大きさより大きい場合、ヨーモーメント制御量算出部37aは、β成分の大きさがγ成分の大きさより小さくなるようにすべり角偏差βerrを補正する。
(もっと読む)
車両の制御装置
【課題】操舵輪から伝達される操舵反力を迅速且つ正確に推定する。
【解決手段】
前輪及び後輪のうち少なくとも一方の舵角を変化させることが可能な舵角可変手段(200)と、前輪及び後輪のうち少なくとも一方における左右輪の制駆動力差を変化させることが可能な制駆動力可変手段(600)とを備えた車両(10)を制御する装置(100)は、車両の目標運動状態に対応する複数の目標状態量を設定する設定手段と、車両の運動状態が目標運動状態となるように、設定される複数の目標状態量に応じて舵角可変手段及び制駆動力可変手段を制御する運動制御手段と、設定される複数の目標状態量の各々、設定された複数の目標状態量に応じた上記少なくとも一方の舵角及び設定された複数の目標状態量に応じた上記少なくとも一方における左右輪の制駆動力差のうち複数の要素に基づいて、操舵反力を推定する推定手段とを具備する。
(もっと読む)
車両の運動制御装置
【課題】車両の実姿勢状態量、特に、実車体横滑り角の推定精度が悪化する場合にも、車両の運動制御性能が低下しない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act等を演算する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d等を演算する。そのほかに実車体横滑り角βz_actにもとづいて第1のアンチスピン・目標ヨーモーメントMc1_aspを演算する第1のアンチスピン目標ヨーモーメントFB部68、横方向加速度Gs、車速Vact、実ヨーレートγactにもとづいて第2のアンチスピン・目標ヨーモーメントMc2_aspを演算する第2のアンチスピン目標ヨーモーメントFB部82を有している。
(もっと読む)
車両の運動制御装置
【課題】車両の操作状態量や運動状態量を検知するセンサからの信号が異常な場合にも、運転者に違和感を与えない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act、実ヨーレートγactを偏差演算部55に入力する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d、規範ヨーレートを算出して偏差演算部55に入力する。仮想外力演算部61は、偏差演算部55から出力される偏差にもとづいて、規範動特性モデル演算部54に仮想外力Mvをフィードバックする。このとき、仮想外力演算制御部62が、前記したセンサからの信号の検知状態にもとづいて、仮想外力の補正を制御する。
(もっと読む)
車両用運動制御装置
【課題】ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行う車両用運動制御装置を提供する。
【解決手段】ステアリング制御とブレーキ制御のいずれをメインに行うかを選択し、その選択結果に基づいて、メインとされる側に対して行わせる車両旋回運動の要求値を出力すると共に、メインとされない側に目標値とメイン側要求値との差に応じた要求値を出力することで、ステアリング制御とブレーキ制御それぞれの配分を適切に設定する。これにより、ステアリング制御をメインとしつつブレーキ制御による補助を行うことが可能となるため、ステアリング制御のみの場合よりも目標値追従性を向上させた車両運動制御が行える。そして、ドライバへの操作負担を軽減できるステアリング制御とブレーキ制御の協調制御を行うことが可能となる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 左右の駆動輪に駆動力を配分制御してヨー運動を制御する際に、ヨー運動の制御初期の応答性を確保しながら、過制御により車両が不安定になるのを防止する。
【解決手段】 駆動源からの駆動力を左右の駆動輪に配分する駆動力配分量を車両の横方向挙動の状態量に基づいて制御する際に、前記駆動力配分量を、操舵角速度算出手段32で算出した操舵角速度θ′と横加速度変化率算出手段31で算出した横加速度変化率YG′とに基づいて補正するので、操舵角θよりも立ち上がりの変化が大きい操舵角速度θ′によりヨー運動の制御初期の応答性を確保しながら、車両の実際のヨー運動の状態を表す状態量である横加速度変化率YG′を用いることで、車両の横方向の運動性能の変化をフィードバックして駆動力配分制御に反映させ、これにより駆動力配分制御が過制御に陥るのを効果的に防止することができる。
(もっと読む)
車両の前後加速度修正装置を備えた車両の諸元推定装置、及び車両の前後加速度修正装置
【課題】
前後加速度の誤差を考慮して、車両の積載量によって変化する車両諸元(例えば、車両重量)を精度良く推定するための前後加速度の修正装置を提供する。さらに、この前後加速度修正装置によって推定された前後加速度の情報に基づいて高精度に車両諸元を推定する。
【解決手段】
車両の前後加速度修正装置は、車両の前後加速度(Gxa)を取得する前後加速度取得手段(GXA)と、前記車両に作用する走行抵抗(Grr)を取得する走行抵抗取得手段(GRR)とを備え、前記前後加速度(Gxa)から前記走行抵抗(Grr)を除いて修正加速度(Gxs)とする。車両の諸元推定装置は、加速操作量取得手段(ASA)によって取得される加速操作量(Asa)、或いは、減速操作量取得手段(BSA)によって取得される減速操作量(Bsa)と、前記修正加速度(Gxs)とに基づいて、前記車両諸元を推定する。
(もっと読む)
牽引車輌の制御装置
【課題】センサ数の増大を抑制しながら牽引車両の挙動の安定化が可能な制御装置を構成する。
【解決手段】制御装置の安定化制御部23が、トラクタに作用する横加速度GYと、ヨーレートYrと、走行速度Vと、操舵角δとに基づいてヒッチ点に作用するヒッチ点横力Fhを推定するヒッチ点横力推定部23Cを備えている。この安定化制御部23は、推定されたヒッチ点横力Fhと逆方向となる相殺ヨーモーメントを演算する相殺ヨーモーメント演算部23Dと、この相殺ヨーモーメントを出力するヨーモーメント出力部23Eとを備えている。このヨーモーメント出力部23Eはトラクタの車輪の左右の一方に制動力を作用させる。
(もっと読む)
1 - 20 / 59
[ Back to top ]