
Fターム[3D246JB12]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 制御を禁止、抑制、強制終了、解除するもの (257)
Fターム[3D246JB12]に分類される特許
101 - 120 / 257
衝突被害軽減装置
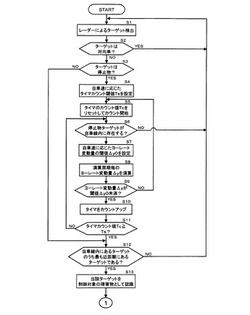
【課題】衝突被害軽減装置のカーブ路入口走行時の誤動作を抑制する。
【解決手段】レーダーで検出した車両前方の停止物ターゲットが自車線内に所定時間以上存在することを、該停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識する条件としたものにおいて、自車のヨーレート(車両の旋回方向への回転角の変化する速度)の単位時間当たりの変動量が所定閾値以上であるときは、カーブ路入口を走行していると判断し、前記所定時間を計測するためのタイマをリセットすることにより、停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識することを禁止する。
(もっと読む)
衝突被害軽減装置

【課題】山岳路走行等で衝突被害軽減装置によるブレーキ作動を禁止する。
【解決手段】操舵角θが車速VSPに応じて設定された所定値θ1より大きい所定レベル以上のカーブ走行が、所定値x1以上の頻度xで行われる所定走行状態が検出されたとき、衝突被害軽減装置によるブレーキ作動を禁止するモードを設定し、その後、所定時間内に所定走行状態が再検出されれば、さらに、その時点から所定時間継続して「ブレーキ作動禁止モード」を維持し、所定時間内に所定走行状態が再検出されなければ、「ブレーキ作動禁止モード」を終了する。
(もっと読む)
車両用制御装置
【課題】GPS受信装置が無くても大気圧センサの異常検出を行うことができるようにする。
【解決手段】前後加速度センサの検出信号に基づいて検出される勾配角度θや車輪速度センサの検出信号に基づいて演算される推定車体加速度dVに基づいて高度変化量を算出し、高度変化量から気圧変化量を推定する。そして、気圧変化量のセンサ値と推定値とを比較することにより、大気圧センサの異常を検出する。これにより、GPS受信装置が無くても大気圧センサの異常検出を行うことが可能となる。
(もっと読む)
走行路逸脱防止装置及びそれを備えた車両
【課題】走行路逸脱防止制御において、運転者の操作意図がない状態で車両の走行路逸脱を防止するためアクチュエータが作動した場合に、運転者の操作意図があると誤判断して逸脱防止制御が中断することを防止すること。
【解決手段】各センサやカメラ等の検出手段の結果に基づいて走行路外への逸脱防止制御を行う逸脱防止制御手段と、運転者の操舵意図を判定する運転意思判定手段と、運転意思判定手段からの運転者の操舵意図に基づいてアクチュエータの作動を規制するアクチュエータ作動規制手段とを有し、運転意思判定手段は、検知した操舵トルクの変化量ΔTh及び操舵アクチュエータへの制御指令値の変化量ΔTsとを算出し|ΔTh|−|ΔTs|が閾値以上の場合に運転者の操作意図があると判断して逸脱防止制御の作動を制限する。
(もっと読む)
車両運動制御装置
【課題】加減速が不要なシーンで、横運動に連係した前後加速度制御の介入を抑制し、走行シーンに対するロバスト性を向上させることができる車両運動制御装置を得ること。
【解決手段】自車両情報取得手段1により検出したドライバ入力情報等に基づいて車輪制駆動トルクアクチュエータ3やブレーキランプ4を制御する車両運動制御演算手段2は、車両に横運動を発生させる操舵操作情報、もしくは車両に発生した横運動情報の少なくとも一つに基づいて車両に発生させる前後加速度指令値を演算する前後加速度指令値演算部7と、前記操舵操作情報および前記横運動情報に基づいて前記前後加速度指令値を補正する前後加速度指令値補正演算部8を備える。
(もっと読む)
車両用運転支援装置
【課題】運転者の運転感覚に合致した最適な自動減速制御を行なうことが可能な車両用運転支援装置を提供すること。
【解決手段】車両が特定の位置を走行する際に自動減速制御を行なう制御手段を備える車両用運転支援装置であって、運転者のアクセル操作を検出するアクセル操作検出手段と、前記運転者のブレーキ操作を検出するブレーキ操作検出手段と、を備え、前記制御手段は、前記アクセル操作検出手段及び前記ブレーキ操作検出手段の検出結果を参照して前記運転者が一連の特定操作を行なったと判定した場合に、該一連の特定操作に含まれる操作の行なわれたタイミングを学習し、該学習したタイミングに基づいて、前記自動減速制御の制御区間を決定することを特徴とする、車両用運転支援装置。
(もっと読む)
車両運動制御装置
【課題】横転抑制制御を行う必要がないときにまで横転抑制制御が行われてしまうことを防止する。
【解決手段】横転抑制制御の開始条件(Gy>Gs)が満たされることによって一旦横転抑制制御が開始されたとしても、横転抑制制御開始から待ち時間T1が経過した時点で横転抑制制御を継続するべきか中断すべきかを判定する。そして、横転抑制制御を中断すべきと判定されたときに、横転抑制制御の開始条件を満たしていてもそれを継続しないようにする。これにより、本来横転に至らない状況まで横転抑制制御が継続されてしまうことを抑制することができる。
(もっと読む)
車両用停車制御装置
【課題】 車両停車時に停車の要否を判定し、確実に停車を維持できる停車維持制御を行うことが可能な車両用停車制御装置を提供する。
【解決手段】 自動的に停車状態を維持している場合に、ドライバにより停車維持終了操作が行われた場合(ステップS31)、その際にドライバによってブレーキ操作が行われていない限り(ステップS33)、停車維持制御を解除してオフにする(ステップS35)制御を実行しないことで、解除時においても停車状態を確実に維持する。
(もっと読む)
ブレーキ制御装置
【課題】液圧保持中にブレーキペダルを踏み込んだ際のフィーリングを改善し、微小なブレーキペダル操作でマスタシリンダ圧が急上昇することを防止し、操作に応じた液圧変化が可能で通常のブレーキと同様な操作が可能なブレーキ制御装置を提供する。
【解決手段】アシスト制御ユニット6は、登坂車両停止検出手段において車両が登坂で車両停止していると判断され、かつペダルリリース検出手段によりペダルリリースされたと判断された場合には、ブレーキペダルBの操作に基づき移動する入力ピストン11aによる液圧減少分を電動のモータ31を制御し、アシストピストン21により補間し、マスタシリンダ3内の液圧を保持するブレーキ制御装置。
(もっと読む)
電気駆動車両
【課題】坂道において電気駆動車両の発進及び停止を行う時に機械式ブレーキと電動機の協調制御を行うことなく、後退することのない発進及び停止を実現する。
【解決手段】本発明の電気駆動車両は、車輪を制動あるいは駆動するための誘導モータと前記誘導モータを制御する電動機制御器と前記車輪を制動する機械式ブレーキを備え、前記車両が前記機械式ブレーキが作動していない状態で停止している時は前記電動機制御器が前記誘導モータの固定子に直流電圧または−1〜+1Hzの間にある周波数の交流電圧を印加し、前記車両を停止させるトルクを前記誘導モータに発生させて前記車両を停止状態で維持する。
(もっと読む)
電子コントロールされる駐車・ブレーキ・システム
本発明は、乗り物のための駐車・ブレーキ・システムに関し、前記駐車・ブレーキ・システムは、駐車・ブレーキECU(20)を通じて電子コントロールされ、前記乗り物のユーザが前記駐車・ブレーキの付勢の程度をコントロールすることが可能な駐車・ブレーキ入力デバイス(10)から受信された信号に従って比例ブレーキング効果を達成し、前記駐車・ブレーキ入力デバイス(10)が、前記ユーザが、第1の位置と第2の位置の間においてベース(12)に関して変位させて、前記駐車・ブレーキの付勢の程度をコントロールすることが可能な操作部材(14)と、前記第1の位置と前記第2の位置の間における前記ベース(12)に関する前記操作部材(14)の瞬時位置を決定する少なくとも1つのセンサ(16)と、前記ユーザによって要求される前記駐車・ブレーキの付勢の程度を示すデジタル信号を生成するため、およびこのデジタル信号を少なくとも前記駐車・ブレーキECU(20)に伝達(19,22)するためのコントローラ回路(18)とを包含する。 (もっと読む)
電子駐車ブレーキシステムを作動させる方法
本発明は、自動車駐車ブレーキシステムを制御する方法に関し、駐車ブレーキシステムは、駐車ブレーキ入力装置(10)から受ける信号に従って比例制動効果を達成するように電子制御されており、前記入力装置を介して車両のユーザは、駐車ブレーキの作動の程度を制御でき、ユーザが、駐車ブレーキ入力装置(10)を用いて駐車ブレーキ作動シーケンスを開始した後、入力装置(10)を解除することにより駐車ブレーキ作動シーケンスを終結したとき、車速が駐車ブレーキ作動シーケンス開始時に第1限界速度(V1)より低いか、又は駐車ブレーキ作動シーケンス終結時に第2限界速度(V2)より低ければ、シーケンスの終結時に、駐車ブレーキはかかった状態にロックされる。 (もっと読む)
車両の運動制御装置
【課題】ステア特性制御と安定化制御との間の制御干渉を抑制できる車両の運動制御装置を提供すること。
【解決手段】ステア特性制御としてスタビライザ制御、減衰力制御等が実行されて、車両のステア特性が車両の走行状態に応じて意図的に初期ステア特性から変更される。安定化制御では、オーバステア状態量Jos(アンダステア状態量Jus)がしきい値Tho(Thu)を超えた場合、制動トルクの調整により発生するヨーモーメントを利用してステア特性が初期ステア特性に近づけられる。ステア特性制御によりステア特性がオーバステア側(アンダステア側)に調整されている場合、しきい値Tho(Thu)が大きくされて、安定化制御が開始され難くなる。ステア特性制御によりステア特性が意図的に調整される傾向が安定化制御の介入により抑制される事態(制御干渉)が抑制され得る。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】車両オペレータの操作体による単純な小旋回用ブレーキ操作によって左右いずれか一方の車輪ブレーキを自動的に選択しつつ、制動力は車両オペレータの手動感覚で任意に調整できるアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】メインブレーキマスタシリンダ51とは別に設置した小旋回ブレーキマスタシリンダ56からハンドブレーキレバー58の操作量に応じて発生し左右の車輪ブレーキ37,38または39,40に制動力として作用する制動圧の供給を、旋回内側に対応する左小旋回制御弁62または右小旋回制御弁64のいずれか一方により制御する。左小旋回制御弁62または右小旋回制御弁64のいずれか一方は、アーティキュレート角センサからの信号によりコントローラが自動的に選択して弁開状態に制御する。車両オペレータは、制動力を実感しながら車体の安定性を保持できるように微妙な調整を行なうことができる。
(もっと読む)
車両追従制御装置
【課題】 目標車速の手動設定を省略できる車両追従制御装置を提供する。
【解決手段】 ドライバのアクセル操作状態を検出するアクセル開度センサ110と、アクセル開度センサ110によりアクセルOFFが検出された場合、自車両と先行車との相対関係を維持する追従制御に介入する速度制御部102aを有するブレーキECU102と、を備え、ブレーキECU102は、速度制御部102aによる追従制御介入時の自車両の速度に基づいて、追従制御時の上限車速を設定する上限車速設定部102bを備えた。
(もっと読む)
車両挙動制御装置
【課題】路面状況が異なっていても安定した旋回性能が得られるとともに、制動手段の過熱抑制とブレーキパッドの過度な磨耗を防止可能な車両挙動制御装置を提供する。
【解決手段】本発明にかかる車両挙動制御装置は、車両1の前輪左右輪6L、6Rへ制動液圧Pが付与されることで各車輪に個別に制動力を与える制動手段10L,10Rと、車輪速度(V)を検知する速度検知手段31〜34と、前輪を操舵するステアリング14の操舵角(θ)を検知する操舵角検知手段36と、前輪のスリップ率(Sf)を導出するスリップ率算出手段41と、スリップ率算出手段で導出されたスリップ率(Sf)が大きくなるほど、制動手段10L,10Rによる制動力が大きくなるように、制動手段10L,10Rの制動液圧(P)を制御する制御手段30を有する。
(もっと読む)
車両制御装置
【課題】 減速制御の減速度をドライバが調整できる車両制御装置を提供する。
【解決手段】 車輪に制動力を発生させるブレーキアクチュエータ70と、自車両の前方の環境を検出するカメラ10と、ドライバによるアクセルペダル20の操作状態が加速方向でないとき、環境に応じてブレーキアクチュエータ70を作動させ、あらかじめ設定された基準減速度Accbに応じて車両を減速制御する速度制御コントローラ60と、を備え、速度制御コントローラ60は、速度制御コントローラ60による減速中にアクセルペダル20の操作状態とブレーキペダル30の操作状態とに応じて基準減速度Accbに乗算する減速度補正ゲインKaadjを補正する。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】運転者に与える違和感を低減しつつ、側方障害物に対する支援制御を適切に行うことができる車両運転支援装置及び車両運転支援方法を提供する。
【解決手段】自車両側方の障害物を検出すると、所定時間後の自車両の将来位置を予測する。その予測した自車両の将来位置が所定の車線幅方向横位置に達したとき、制御開始と判定して前記障害物への接近を防止する方向に自車両を制御する。その際、障害物を非検出の状態から検出した状態となったときに、自車両が所定横位置よりも前記障害物側を走行しているとき、自車両が前記所定横位置よりも当該障害物とは反対側を走行しているときと比較して、前記制御開始の判定を抑制する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジンは停止するものの、動作保証ができる状況でのみ制御を行うようにしたハイブリッド車両の制御装置を提供する。
【解決手段】エンジン2およびエンジン2に直結されたモータジェネレータ3を車両の駆動源とし、モータジェネレータ3は発電可能であり、モータジェネレータ3で発電した電気を蓄電する高圧バッテリ4と、エンジン2を制御するエンジン制御ECU10と、エンジン2以外の車載機器を制御する車載制御装置と、を備えるハイブリッド車両1の制御装置において、エンジン2が作動中であるか、または高圧バッテリ4の残容量が高残容量値以上であるかの少なくとも一方の条件が満たされているときに、前記車載制御装置の作動が許可されることを特徴とするハイブリッド車両の制御装置である。
(もっと読む)
車両制御装置
【課題】 ドライバの制動意思に合致した減速開始タイミングを実現できる車両制御装置を提供する。
【解決手段】 コントロールユニット4は、アクセル状態検出部2によりアクセル操作量の減少が検出され、かつ、カーブ検出部8により走行進路にカーブが検出された場合には、ブレーキ制御部5を作動させる。
(もっと読む)
101 - 120 / 257
[ Back to top ]