
Fターム[3D246JB12]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 制御を禁止、抑制、強制終了、解除するもの (257)
Fターム[3D246JB12]に分類される特許
21 - 40 / 257
アイドリングストップシステムおよびアイドリングストップの方法
【課題】車両のアイドリングストップからのエンジンの再始動時にヒルスタートアシストを低コストで円滑に行えるアイドリングストップシステムおよびアイドリングストップの方法を提供する。
【解決手段】アイドリングストップシステムは、車両の走行停止状態において原動機4を停止および再始動するアイドリングストップシステムであって、ブレーキペダルの操作によって発生した制動力を少なくとも一時的に保持する制動力保持制御を実行する制動制御装置6と、ブレーキペダルの操作中において、所定の再始動条件が成立した際に停止中の原動機4を再始動する原動機制御装置4Eと、原動機4の再始動に先立って制動制御装置6の作動条件を一時的に緩和する作動条件緩和手段6とを備える。
(もっと読む)
車両用制動制御装置

【課題】ドライバーの意図に応じて的確に自動制動を解除可能な車両用制動制御装置を提供する。
【解決手段】自車両と障害物との衝突の危険性に応じて自動的に自車両を制動する車両用制動制御装置であって、自車両と障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、衝突判定手段によって自車両と障害物との衝突の危険性が高いと判定された場合、自車両のブレーキ装置を制御して自動的に制動力を発生させる自動制動手段と、自車両のドライバーによる自車両のアクセルペダルの操作頻度に基づいて、自動制動手段による自動的な制動力の発生を停止する自動制動解除手段とを備えることを特徴とする車両用制動制御装置である。
(もっと読む)
車両用ブレーキ制御システム
【課題】車両の走行中に、パーキングブレーキのスイッチ操作により制動動作が開始された場合に、その制動動作が運転者により意図されたものでなければ、パーキングブレーキスイッチの解除操作が行われずとも、制動動作を円滑に終了させる。
【解決手段】電動パーキングブレーキスイッチ102の操作に応じて、パーキングブレーキ及び液圧ブレーキを作動させ、車両の減速が開始されたにも係らず、車両の運転者がアクセルペダルの踏込操作を行なっていることが検出されたときには、パーキングブレーキスイッチが誤って操作されたものとみなす。この場合、電動パーキングブレーキスイッチ102の解除操作が行なわれずとも、パーキングブレーキ及び液圧ブレーキの作動を停止させる走行中解除処理を実行する。これにより、パーキングブレーキスイッチが誤操作された場合に、パーキングブレーキ及び液圧ブレーキによる制動動作を円滑に終了させることができる。
(もっと読む)
制動力制御装置
【課題】車両をより早く減速させることが可能な制動力制御装置を提供する。
【解決手段】制動力制御装置12では、車体速度Vv若しくは車輪速度Vw又はこれらの目標値が所定速度以下であり、且つ緊急ブレーキ制御手段118による緊急ブレーキ及びアンチロックブレーキ制御手段110によるアンチロックブレーキが作動しているとき、前記アンチロックブレーキによるブレーキ液圧の減少を抑制する。
(もっと読む)
車両用運転支援装置
【課題】勾配路での変速機のダウンシフトが行われない場合にも、ブレーキの自動介入時間を増加させることなく良好な車速制御を行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ACCの実行中にブレーキの自動介入制御が設定時間t0以上継続したことを判定したとき、目標加速度aを予め設定された負側の値Bまで変化させ、変化させた目標加速度aを、基本目標加速度a0が正側の設定値a0thを越えるまでの間維持する割込制御を行う。
(もっと読む)
車両用ブレーキ装置
【課題】 開閉弁によって2系統の圧力供給系を切り替えるブレーキ・バイ・ワイヤの車両用ブレーキ装置において、ホイールシリンダへの液圧供給開始時に、開閉弁の作動を保証すると共にブレーキの操作感を向上させる。
【解決手段】 ブレーキペダル11と、電磁弁である開閉弁24a・24bを備えた配管42a・42bを介して互いに接続されたマスターシリンダ15及びホイールシリンダ2b・3bと、ペダル操作量検出手段11aと、電動モータ12を備えたモータ駆動シリンダ13と、バッテリ7と、バッテリの電圧を検出する電圧センサ段51と、制御手段6とを有する車両ブレーキ装置であって、制御手段は、電源の電圧が閾値電圧以上である場合には、ペダル操作量に基づいてモータ駆動シリンダの駆動を開始する際には、開閉弁を開いた状態に維持してモータ駆動シリンダの駆動を開始し、モータ駆動シリンダの駆動を開始の後に開閉弁を閉じることを特徴とする。
(もっと読む)
車両の運転支援装置
【課題】ドライバの意思を尊重しつつ、衝突防止制御を有効に機能させることができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、制動制御中にドライバによるブレーキペダルの踏込操作を検出した場合には、自車両1と制御対象との衝突の可能性があることをドライバが認識している可能性が高いと判断して制動制御を中断する。これにより、ドライバの意思に反する不要な制動制御の介入を防止することができる。その一方で、制御対象との衝突の可能性が高い状況下でドライバによるブレーキペダルの踏込量が解放側に設定速度以上で変化した場合には、一旦中断した制動制御を再開する。これにより、衝突防止制御を有効に機能させることができる。
(もっと読む)
車両の運転支援装置
【課題】制動のみによる障害物回避も精度良く確実に行うことができ、制動力に加えてドライバが操舵により旋回回避する際においても、ドライバが意図する十分な旋回運動により障害物を回避することができる信頼性の高い衝突防止制御を行う。
【解決手段】走行制御ユニットは、自車両と障害物との衝突可能性を判定し、自車両と障害物との衝突可能性が高いと判定された場合、障害物との衝突を防止する制動力を予め設定し、自動ブレーキ制御装置に信号出力して減速度を発生させるが、この際、ドライバの操舵を検出した場合には、発生させる制動力を低下補正する。
(もっと読む)
アクセルペダル誤操作対応装置およびアクセルペダル誤操作対応装置用のプログラム
【課題】アクセルペダル誤操作を検出して車両の発進を禁止した後に、アクセルペダルの操作に基づいて発進禁止を解除する技術において、発進禁止を解除してよい場面をより適切に検出する。
【解決手段】アクセルペダル誤操作であると判定したことに基づいて、車両の発進を禁止し、発進が禁止されているとき、解除操作が行われたか否かを判定し、解除操作が行われたと判定したことに基づいて、車両の発進禁止を解除するアクセルペダル誤操作対応装置において、誤操作と判定されたアクセルペダル操作の後(ステップ210)、待機時間経過後に操作量が誤操作判定閾値を超えない範囲でアクセルペダルが再操作されたことに基づいて(ステップ220、230、240)、解除操作が行われたと判定する(ステップ250)。
(もっと読む)
自動車
【課題】坂道の発進の際に車両のずり下がりを抑制しつつ、シフトポジションがニュートラルポジションとされたときに運転者が予期するよう車両を動作させて運転者に違和感を与えないようにする。
【解決手段】停車したときや停車中にシフトレバーが操作された際、シフトポジションSPが前進用ポジション(D,B)のときには、前方に上り勾配のときにだけ制動力保持制御を許可し、それ以外のときには制動力保持制御を禁止し、シフトポジションSPが後進用ポジション(R)のときには、前方に下り勾配のときにだけ制動力保持制御を許可し、それ以外のときには制動力保持制御を禁止し、シフトポジションSPがニュートラルポジション(N)のときには、勾配に拘わらずに制動力保持制御の実行を禁止する。
(もっと読む)
電動パーキングブレーキ装置
【課題】運転者のアクセルペダルの操作を速やかに認識し、スロットルバルブの開き始めにおいて、車両の引きずり現象や発進直後の制動ショックを低減する電動パーキングブレーキ装置を提供する。
【解決手段】アクセルペダル操作量信号APSを用いてスロットルバルブの開き始めのタイミングに電動パーキングブレーキを解除する代わりに、アクセルペダルが踏み込まれていない時刻t1のタイミングでのアクセルペダル操作量信号APSを取得して、基準アクセルペダル操作量信号APS*とし、その後は、アクセルペダル操作量信号APSと基準アクセルペダル操作量信号APS*との比をアクセル操作係数KACとし、アクセル操作係数KACが閾値KAC*以上になったタイミングで電動パーキングブレーキを解除する。
(もっと読む)
自動制動装置
【課題】運転者の加速意図に応じて、迅速に自動ブレーキの解除が可能な自動制動装置1を提供する。
【解決手段】運転者のブレーキペダル操作に依存しない制動力を自動的に発生させる自動制動装置1において、運転者のアクセルペダル操作により、発生していた制動力を減衰係数に応じて減衰させ解除する制御を行う制御手段2と、アクセルペダル操作に基づいて、車両を加速させようとする運転者の加速意図の程度を検出する加速意図検出手段8とを有し、制御手段2は、加速意図の程度に応じて減衰係数を減少させることで、制動力を速く減衰させ解除する。加速意図検出手段8が、アクセルペダル19の開度と、踏込速度と、踏込加速度の中の少なくとも1つが所定値以上であると判定した場合に、制御手段2は、減衰係数を減少させる。
(もっと読む)
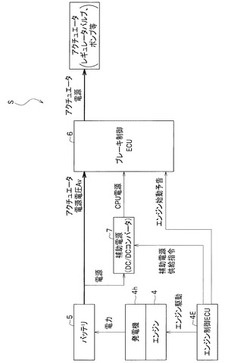
車両用ブレーキ装置
【課題】 電源の一時的な失陥でブレーキ装置の制御が不必要にシャットダウンされるのを防止する。
【解決手段】 電源71の失陥によってスレーブシリンダ42が作動不能になる異常時には、ブレーキ制御ECU72はスレーブシリンダ42およびマスタカットバルブ32,33の制御を停止し、ブレーキペダルによって作動するマスタシリンダが発生するブレーキ液圧でホイールシリンダを作動させる。ブレーキ制御ECU72は、第1監視手段M1が電源71の遮断を検出し、かつ第2監視手段M2がブレーキ制御ECU72と該ブレーキ制御ECU72とは独立に設けられた他の制御ECU73,74,75との間の通信の途絶を検出したときに、スレーブシリンダ42およびマスタカットバルブ32,33の制御を停止するので、電源71の一時的な失陥でブレーキ装置の制御が不必要にシャットダウンされるのを確実に防止することができる。
(もっと読む)
制動力制御装置
【課題】車両における不適切な減速度の低下を抑制する。
【解決手段】制動力制御装置は、右前輪(WFR)及び左後輪(WRL)に対応する第1油圧系統、並びに左前輪(WFL)及び右後輪(WRR)に対応する第2油圧系統を備える車両(500)の制動力を制御する。制動力制御装置は、各車輪の車輪速度を夫々検出する複数の車輪速度検出手段(83)と、前輪の車輪速度と、各後輪の車輪速度との差に基づいて第1及び第2油圧系統を制御することで、各後輪に対する制動力制御を夫々独立して行う制御手段(110,120)と、車輪速度検出手段の異常を検出可能な異常検出手段(130)と、車両の減速度を検出する減速度検出手段(140)と、車輪速度検出手段の異常及び減速度が所定値以下であることが検出された場合に、制御手段による制動力制御を禁止する制御禁止手段(150)とを備える。
(もっと読む)
車両のブレーキ装置
【課題】後扉を開けた状態やアイドリングストップの作動によってストールトルクが発生しなくなった状態で、車両が動き出さないように保持できるとともに、車両の停車と同時に作動し、作動時における衝撃を緩和することができるブレーキ装置を提供する。
【解決手段】フロント側ブレーキブースタとを接続する第1のエア管路と、リア側ブレーキブースタとを接続する第2のエア管路と、エアタンクとフロント側ブレーキブースタとを接続する第1のバイパスエア管路と、エアタンクとリヤ側ブレーキブースタとを接続する第2のエア管路と、エア管路に設けたブレーキバルブと、を有し、前記第1のバイパスエア管路上の第1のブレーキコントロール側バルブ及び前記第2のブレーキコントロール側バルブを、前記車両のアイドリングストップ時に所定時間ずらしたタイミングで開放するタイムラグリレーを設けた。
(もっと読む)
車両挙動制御装置
【課題】 ヨーレイトセンサの失陥時等における望ましくない車両挙動を抑制した車両挙動制御装置を提供する。
【解決手段】 制動継続時間Tbが第1故障判定閾値Tthに達することで、ステップS13の判定がYesになると、VSA−ECU6は、ステップS14で初期値1.0の制動ゲインGbから所定の漸減値ΔGbを減じた後、ステップS16で制動ゲインGbが0となったか否かを判定する。ステップS13の判定がYesの状態が所定時間続き、ステップS15の判定がYesになると、VSA−ECU6は、ステップS16で制動禁止フラグFpbを1とした後、ステップS17で失陥時処理を実行して制動禁止判定制御を終了する。
(もっと読む)
液圧ブレーキシステム
【課題】ブレーキシステムの自己診断機能において、作動液の温度が低下している状況下における誤検出を防止する。
【解決手段】走行中において、動力式液圧源装置によって発生させられる液圧が閾液圧PBより低い状態が閾継続時間TB以上続いた場合に、ブレーキシリンダへの作動液の供給を、動力式液圧源装置からマスタシリンダ装置に切り換えるように構成されたブレーキシステムを、作動液の温度が設定温度より低下していると推定される場合に、閾液圧を低い値PB'することと、閾継続時間を長い値TB'とすることとの少なくとも一方を行うように構成する。作動液の温度が設定温度より低下している状況下において、誤って動力式液圧源装置の異常と診断されることを回避することが可能である。
(もっと読む)
プリクラッシュセーフティーシステム
【課題】二次被害の発生を防止することができるプリクラッシュセーフティーシステムを提供する。
【解決手段】自動ブレーキを作動させることにより、車両を前方の障害物と接触して停止、又は車両を前方の障害物の至近距離で停止させるプリクラッシュセーフティーシステムにおいて、ドライバーの降車を検出する降車検出手段と、自動ブレーキの保持開始から所定時間以上が経過していない場合に、前記降車検出手段からの信号に基づき、自動ブレーキを保持継続状態とする制御手段とを備えた。
(もっと読む)
トラクションコントロール装置
【課題】車両速度の推定にあたり、実際の車両速度との誤差が生じた場合であっても、適切に制御することができるトラクションコントロール装置を提供すること。
【解決手段】車両速度推定装置及び駆動力制御装置を備えたトラクションコントロール装置は、駆動力制御装置を構成し、回転速度検出手段で検出された回転速度から各車輪のスリップ率を算出して、算出されたスリップ率が一定の目標値に収束するように、制動機構の制御を行う制動機構制御手段84と、車両速度推定装置で推定された建設車両の車両速度、及び、制動機構制御手段84で算出されたスリップ率に基づいて、駆動力制御装置による駆動力制御のバランス状態の適否を判定する車両状態判定手段815と、バランス状態が不適であると判定されたら、駆動力制御装置による駆動力制御の状態を変更する駆動力制御変更手段816とを備えている。
(もっと読む)
走行支援装置
【課題】車両の前進時と後退時とで検知対象とすべき障害物に応じた適切な検知が可能な走行支援装置を提供する。
【解決手段】車両11の前方の障害物を検知するレーダ14と後方の障害物を検知するソナー12とを備え、車両の前進時及び後退時にレーダ14及びソナー12により検知された障害物と車両11との接触を防止するように車両11の走行を制御するPCS ECU20を備えるため、前進時及び後退時の両方で障害物と車両11との接触を防止することが可能となる。また、レーダ14は、ソナー12とは異なる種類のセンサであり、ソナー12よりも車両11から長距離に位置する障害物を検知することが可能であるため、後退時の比較的に低速な速度域と、前進時の比較的に高速な速度域とに応じて、検知対象とすべき障害物と車両11との位置関係に応じた適切な検知が可能となる。
(もっと読む)
21 - 40 / 257
[ Back to top ]