
Fターム[3D246JB12]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 制御を禁止、抑制、強制終了、解除するもの (257)
Fターム[3D246JB12]に分類される特許
241 - 257 / 257
航空機の電気ブレーキシステムのための自動ブレーキインターロック
航空機のための電気自動ブレーキインターロックシステムは、ブレーキの不用意な(命令されていない)適用を防止する自動ブレーキ電力インターロックメカニズムを含む。自動ブレーキ電力インターロックは、自動ブレーキ作動データが正当な自動ブレーキ適用条件を示さない際はいつでも、ブレーキアクチュエータから動作電力を取除く。インターロック処理は、不用意な自動ブレーキコマンドが生成された場合でも、ブレーキアクチュエータが当該不用意な自動ブレーキコマンドに基づき動作することができないように自動ブレーキコマンド処理と並行して行なわれる。この点において、ブレーキアクチュエータは、以下の2つの動作が同時に起こらないならば、ブレーキを自動的に適用することができない。すなわち、動作電力が、電気ブレーキアクチュエータを有効にするよう与えられる場合と、正当な自動ブレーキ適用条件に応答して自動ブレーキ作動制御が命令される場合とである。 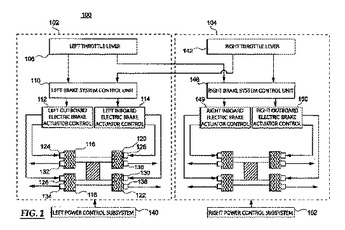 (もっと読む)
(もっと読む)
車輪速度補正装置
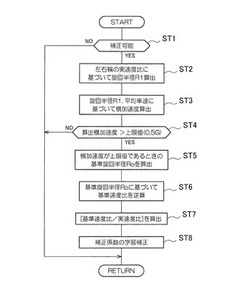
【課題】定常円旋回などの定常旋回走行時であっても、異径タイヤ装着等によって生じる左右輪の車輪速度差の誤差を補正可能とする。
【解決手段】左右輪の実速度比に基づいて旋回半径R1を算出し、この旋回半径R1と車速から車体の横加速度を算出する(ST2〜ST4)。次に、実速度比に基づいて算出した算出横加速度が、タイヤグリップ限界等を考慮して設定した上限値(0.5G)を超えているか否かを判定し、算出横加速度が上限値を超えているときには、横加速度が上限値になるように後輪左右の基準速度比を逆算して左右輪の車輪速度の補正係数を算出し、この補正係数を用いて車輪速センサの各出力信号(生データ)を学習補正する(ST5〜ST8)。このように車体の横加速度(旋回半径)に基づいて学習補正を行うことによって、定常旋回走行時に後輪左右の車輪速度の誤差を低減する補正を実施することができる。
(もっと読む)
自動ブレーキ装置

【課題】車両の各種安全装置から出される制動要求に対して、制動特性の異なる複数の自動ブレーキ装置を適宜作動させる。
【解決手段】車両VLは、各車輪4FR〜RLに油圧ブレーキ装置2と、後輪を制動する電動パーキングブレーキ3とを備えている。ブレーキ制御ECU1は、各種センサ8からの検出値および渋滞追従制御ECU71、車間制御ECU72、居眠り防止ECU73、・・・などの安全装置からなる制動要求出力手段からの制動要求を車内LANバス6を介して入力し、車速その他の車両状態に応じて制動要求の大きさを判定し、その判定結果に基づいて油圧ブレーキ装置2および電動パーキングブレーキ3を同時または切換えて作動する作動信号を出力する。
(もっと読む)
車両制御装置
【課題】 磁気ロータの異常を検出することが可能な磁気式回転検出装置を用いた車両制御装置を提供する。
【解決手段】 車輪20の回転軸に取り付けられた磁気ロータ10は、外周部に所定の間隔で配設された磁性体を有する。この磁気ロータ10による磁力変化を検出するピックアップ15は、車輪20の回転軸と連結していない車体本体に配置されている。車両制御ECU3内には、車輪速判定手段16が設けられ、ピックアップ15の出力を基にして各車輪の車輪速判定を行う車輪速判定部18と、異常判定部17とを有しており、異常判定部17は、磁気ロータ10の見かけの回転速度変動の発生間隔時間とその回転速度の積に基づいて特定位置における見かけの回転速度変動の発生を判定することにより異常判定を行う。
(もっと読む)
車両減速の自動作動方法及びその装置
【課題】他の車両との衝突確率を表す変量が予め設定可能なしきい値を越えなければならず,その場合にしきい値は運転者反応,実際の走行状況又は環境状況に従って変更可能であることにより,衝突を阻止するために車両減速の自動作動方法と装置が提案される。
【解決手段】しきい値の変化を定めるために,操舵角度センサ,ブレーキペダルセンサ,アクセルペダルセンサ,車両速度を求める装置,走行路傾斜あるいは走行路勾配を求める装置,車両ヨーレートを求める装置,車両フロート角度を求める装置又は車両の環境内の,特に車両の前方領域内の静止対象と移動対象を検出する装置の信号が評価される。
(もっと読む)
航空機の電気ブレーキシステムのためのブレーキインターロック
航空機のための電気ブレーキシステムは、意図しない(指令されない)ブレーキがかからないようにする電力インターロック機構を含む。このインターロックは、ブレーキシステムセンサデータが適正なブレーキをかける状態を示さないときはいつでも、ブレーキ機構から動作電力を除去する。インターロック処理は、たとえ意図しないブレーキ指令が生成されても、ブレーキ機構が意図しないブレーキ指令に基づいて動くことができないようにブレーキ指令処理に並列に起こる。  (もっと読む)
(もっと読む)
自動車の走行方向を検出するための方法
本発明は、事故回避保護システムを有する車両の走行方向を検出するための方法であって、次のステップ、
a)車両方向の車両の前の対象物を検出するステップと、
b)相互の相対位置に基づき車両と対象物が接触する可能性を算出するステップと、
c)対象物が接触する可能性に関する算出結果に基づき運転者によらない制動及び/又は操舵行程を作動するステップとを含む方法に関する。
保護システムの誤った作動を回避するために、本発明に従って、別のステップ、すなわち、
e)予防的に作用する保護システム114又はこの予防的に作用する保護システム114と結合された安全装置116を有する車両の走行方向を算出するステップ、及び後退走行が検出されたときに、運転者によらない制動及び/又は操舵行程を阻止又は中断するステップが提供される。 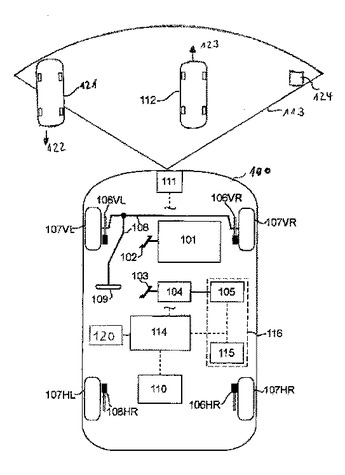 (もっと読む)
(もっと読む)
ブレーキ装置
【課題】ドライバーが緊急ブレーキを意図しているか否かを的確に判定して、制動力を補助することが可能なブレーキ装置を提供する。
【解決手段】ブレーキペダル1によって駆動されるマスタシリンダ2のブレーキ液圧を検出する圧力センサ31の出力の変化を監視し、当該出力が単調に上昇しながら一定値に固着する経時変化を示す場合には、何らかの故障により当該出力の上昇がなされたものであり、ドライバーが緊急ブレーキを意図していないと判定し、車輪11〜14の油圧ブレーキ装置を構成するホイールシリンダ19〜22の制動力を補助して通常のブレーキ時よりも車輪の制動を強化するブレーキアシスト(BA)制御の実行を禁止する。また、圧力センサ31の出力が速やかに上昇して最大値をとった後に減少する経時変化を示す場合には、ドライバーが緊急ブレーキを意図していると判定してBA制御の実行を許可する。
(もっと読む)
車間距離制御型定速走行装置
【課題】先行車の減速や他車の割り込みによって車間距離が急に減少した場合でも、先行車へ接近し過ぎないように制御する。
【解決手段】警報の発令状況、車間距離制御の解除操作状況および車両の操作量に基づいて、警報発令条件および/または車間距離制御開始条件を変更する。これにより、運転者ごとの好みや癖、あるいは運転経験に合わせた最適なタイミングで警報を出すことができ、先行車へ接近し過ぎるのを防止できる。
(もっと読む)
ブレーキ装置内に設定可能な終端圧力を再現可能に発生させるための方法および装置
ブレーキ回路の少なくとも1つ部分内に設定可能したがって再現可能な終端圧力を達成させるために、はじめに、弁(18)が閉鎖されているとき、圧力を上昇ないしは低下させるためにポンプ(26)が操作される。第1の所定の目標圧力が到達されたとき、ないしは圧力しきい値が超えられたとき、前記弁(18)は第1の操作により開放位置に移動される。本発明により、ポンプ(26)が遮断されたのちに、前記弁(18)の操作は、設定可能な時間の間、第1の操作から第2の操作への連続的な変化が行われ、この変化において、特に弁(18)にかかっている圧力差を考慮しながら弁(18)が保持位置をとるように、前記弁(18)の操作が修正される。 (もっと読む)
走行速度調整システムを装備した自動車の運転者を警告するための方法
本発明は、間隔に関連した走行速度調整システムが装備されている自動車の運転者を警告するための方法に関し、この方法では、間隔に関連した走行速度調整中、間隔に関連した走行速度調整システムにより生じさせられた制動モーメントを用いて自動車が停止状態に保持され、また自動車を離れるために運転者が自動車を離れること又は運転者の離れる意図が認識可能である。本発明に従い、運転者の離れることを認識した場合又は運転者の離れる意図を認識した場合、自動車が運転者にとって知覚可能な運動をこうむるように前記の生じさせられた制動モーメントが変更又は調節される。 (もっと読む)
ブレーキコントロールシステム
車両用のブレーキ作動不能化装置は、車両の方向を示す信号を受信する為の電子制御ユニット(ECU)を含む。特にトラックが斜面をバックしながら下っているとき、車両の方向に応じて、車両の速度に応じて、及びブレーキ要求圧に応じて操舵軸と関連したブレーキを作動不能にする為の制御デバイスがECUと連通する。 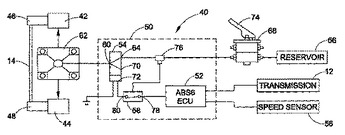 (もっと読む)
(もっと読む)
衝突回避システムを備えた車両の制御方法及びこの方法を実行する装置
本発明は、衝突の可能性のある他の当事者(20)を感知する手段(11)と、制御ユニットに接続された、衝突の危険を評価する手段(12)とを有する、衝突回避システムを備えた車両(10)の制御方法に関する。本発明によれば、他の衝突当事者が側方方向の比較的近くに来た場合に、側方衝突を回避するための車両(10)の経路(15)を設定するよう、アクチュエータシステムが稼動される。本発明はまた、本発明による方法を制御する装置に関する。  (もっと読む)
(もっと読む)
手動操作式パーキングブレーキの作動方法
【課題】錯誤によるパーキングブレーキの解除が生じても、車両を安全な状態へと移行することができるパーキングブレーキ作動方法を提供すること。
【解決手段】原動機を備えて成る車両の、手動操作式パーキングブレーキの作動方法であって、パーキングブレーキが、操作手段と、車輪回転数センサからの検出信号が入力される電子制御ユニットと、パーキングブレーキ力を発生させる少なくとも1つの調節ユニットと、該調節ユニットにより少なくとも1つのアクスルにパーキングブレーキ力を負荷するブレーキ装置とで構成され、車両の発進を検出した後、パーキングブレーキを解除するよう電子制御ユニットが調節ユニットを制御する前記パーキングブレーキ作動方法において、前記車両の発進の検出が錯誤によるものである場合、パーキングブレーキ力を高めるよう前記電子制御ユニットが前記調節ユニットを制御する。 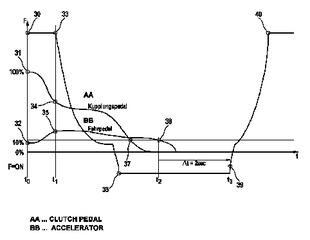 (もっと読む)
(もっと読む)
ブレーキ・アシスト機能の作動化可能状態への切換方法および装置
【課題】ブレーキ回路内に発生する圧力振動により、ブレーキ・アシストの意図しないおよび正当でない投入が行われるのを回避する、ブレーキ・アシスト機能の作動化可能状態への切換方法および装置を提供する。
【解決手段】ブレーキ・アシスト機能の作動化可能状態への切換方法において、ブレーキ力調節機能の終了後に、ブレーキ・アシスト機能が作動化不可能状態に切り換えられるか、または作動化不可能状態に保持され(202)、油圧ブレーキ回路の所定の位置における油圧に関する情報が決定され(203)、この情報が少なくとも1つの所定の条件を満たしたのちに(204)、ブレーキ・アシスト機能が作動化可能状態に切り換えられる。
(もっと読む)
車両用のブレーキ装置を作動させる方法
本発明は、機械式のギヤボックスを有する駆動エンジンを有し、電気機械式に操作可能な車両用のパーキングブレーキを作動する方法に関する。このパーキングブレーキは、主に操作要素,車輪回転数センサの車輪回転数値が入力される電子制御装置,制動力を生成する装置及び少なくとも1つの軸に接し、この装置によって制動可能なブレーキ装置から構成される。この場合、電子制御装置は、車両の始動過程を検出した後にこの装置を制御して、パーキングブレーキの解除過程を実施する。この場合、クラッチペダル変位センサが、車両のクラッチペダルの位置を検出し、運転者がギヤボックスの1つのギヤを入れたかどうかを、ギヤ情報センサが検出する。
パーキングブレーキの自動化された解除過程は、安全上重要な方法である。本発明の方法は、クラッチペダル変位センサ及び/又はギヤ情報センサの信号の妥当性が検査されることを提唱する。  (もっと読む)
(もっと読む)
車両における乗員保護手段の制御方法及び乗員保護システム
本発明は車両における乗員保護システム、及び乗員保護手段(2)の制御方法に関する。前記システムによれば、障害物への距離が検出され、衝突を避けるために必要なブレーキ減速度が決定され、該決定されたブレーキ減速度に基づき、所定の事象が発生しているかどうかが定められ、もし前記事象が発生している場合は、乗員保護手段(2)がそれ自体を始動させるため、又はそれ自体が始動されるべく動作するために制御される。車両のドライバがブレーキ操作を開始するためにブレーキ操作要素を操作した場合にのみ、必要なブレーキ減速度が決定され、又は決定された必要なブレーキ減速度が所定の事象の発生に関して評価される。 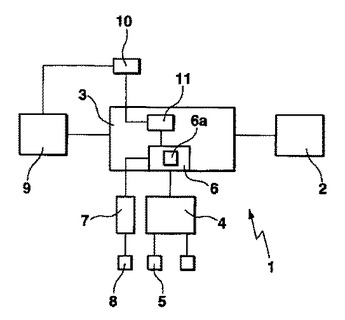 (もっと読む)
(もっと読む)
241 - 257 / 257
[ Back to top ]