
Fターム[3D246JB48]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | フィードバック制御 (223) | P、I、D制御 (40)
Fターム[3D246JB48]に分類される特許
21 - 40 / 40
回生制動を持つ車両の独立制動及び操縦性の制御方法及びシステム
【課題】エネルギー回収と車両操縦性とを最適化する。
【解決手段】当初回生制動を行なう車両における操縦性を維持するために、前後の制動トルクを監視そして動的に調整する、フィードバック制御アルゴリズムを用いる、制御が提供される。単比例・積分・導関数フィードバック制御器を用いることが出来る。制御器46は、少なくとも一つの実際の車両操縦性値と少なくとも一つの所定の操縦性目標値とに基づき、様々な割合で、各車輪42,64の非回生制動を独立して、そして回生制動を、選択的に作動させるために、車輪速、横加速度、ヨーレート及びブレーキ位置、を監視することが出来る。操縦性要素が、所定の縦スリップ率、スリップ角又はヨーレートの比較を含むことが出来る。後輪駆動構成については、非回生制動を、旋回外側のフロント・アクスル68の車輪にのみ行い、前輪駆動構成については、非回生制動を、旋回内側のリア・アクスルの車輪にのみ行なう。
(もっと読む)
ソレノイド駆動装置、及びブレーキ装置

【課題】ソレノイドを流れる電流を、より適切に目標電流に近づけることが可能なソレノイド駆動装置等を提供すること。
【解決手段】ソレノイドを流れる電流が所与の目標電流に近付くようにスイッチング素子を駆動する駆動制御手段を備えるソレノイド駆動装置であって、第1の所定電流以下の領域における前記ソレノイドを流れる電流の時間変化に基づく第1の補正演算値と、第1の所定電流に比して高い第2の所定電流以上の領域におけるソレノイドを流れる電流の時間変化と第1の所定電流以下の領域におけるソレノイドを流れる電流の時間変化との差分に基づく第2の補正演算値と、を算出する補正演算手段を備え、駆動制御手段は、補正演算手段により算出された第1及び第2の補正演算値に基づきスイッチング素子を駆動することを特徴とする。
(もっと読む)
走行制御装置及び走行制御プログラム
【課題】車両の走行状況に応じて適切に走行制御を再開する。
【解決手段】目標車軸トルク生成部52は、車速維持演算部51により演算された目標加速度を実現するための目標車軸トルクとして、車両の走行に対する走行抵抗を加味したフィードフォワード成分が含まれた目標車軸トルクを算出する。制動調停部58は、目標車軸トルク生成部52から入力される目標車軸トルクと、ブレーキドライバモデル57により演算された運転者のブレーキ操作量に対応する要求制動車軸トルクのうち、減速量が大きい方のトルクを選択して制動要求トルク実現部59へ出力する。また、要求制動車軸トルクが目標車軸トルクを上回っている(減速量が大きい)状態では、ブレーキオーバライド信号をFBトルク演算部62へ出力する。制動要求トルク実現部59は、制動調停部58から入力した車軸トルクを実現するための制御信号をブレーキECU40へ出力する。
(もっと読む)
摩擦装置を備えた自動車
【課題】摩擦材がキャリパに対し衝当する際の運動エネルギーを低減することにより、クロンク音の発生を抑制する。
【解決手段】車輪と共に回転する回転部材としてのブレーキロータ14と、摩擦材としてのブレーキパッド18と、クリアランスをもってブレーキパッドを収容支持するキャリパ16とを有し、キャリパを介してブレーキパッドをブレーキロータに対し押圧する自動車の摩擦装置に於いて、ブレーキロータ14の回転方向進み側に於いてブレーキパッド18とキャリパ16とが接触していない状況に於いて(ステップ450、470)、制動が行われるときには(ステップ460)、ブレーキパッド18に対する押圧力の増大勾配を制限し(ステップ480〜)、ブレーキパッド18が高い運動エネルギーにてキャリパ16に衝当すること及びこれに起因するクロンク音の発生を効果的に抑制する。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】ドリフト走行時等において好適な旋回走行を実現するヨー制御を行う車両用動力伝達装置の制御装置を提供する。
【解決手段】予め定められた関係から前輪の横滑り角βf及び車体の速度Vに基づいて目標ヨー角速度γrefを算出する目標ヨー角速度算出手段66と、その目標ヨー角速度算出手段66により算出された目標ヨー角速度γrefに応じたヨーモーメントが得られるように前記トルク配分制御装置50の作動を制御するヨーモーメント制御手段70とを、備えたものであることから、車体の横滑り角が比較的大きいドリフト走行時においても、前輪横滑り角が旋回方向内側を向いている場合には旋回アシスト方向のヨーモーメントを発生させる等、ドリフト走行を妨げないヨー制御が実現できる。
(もっと読む)
車両制御装置
【課題】車両制御装置において、目標加速度に対する実加速度の応答遅れを低減すること。
【解決手段】ブレーキフィードバック制御部は、ブレーキフィードバック利用状態であれば、PID制御モデルを用いてブレーキフィードバックトルクTfb_BKを演算し(S330,S340)、ブレーキフィードバック制限状態であれば、PID制御モデルを用いたブレーキフィードバックトルクTfb_PTの演算を停止し、ブレーキ制限開始タイミング時に出力していたブレーキフィードバックトルクTfb_BKを出力値として保持する(S360)。そして、ブレーキ制限解除タイミングとなると、保持していたブレーキフィードバックトルクTfb_BKを初期値として、フィードバック制御を再開する。これにより、ブレーキ制御解除タイミング直後のブレーキ機構では、0[N・m]よりも大きい特定制動トルクを発生する。
(もっと読む)
回転速度制御装置
【課題】またぎ登坂路を走行中に、回転速度差を良好に抑制可能とする。
【解決手段】左側駆動輪と右側駆動輪との間の回転速度差が開始しきい値以上になると、回転速度が大きい方の車輪の液圧ブレーキを作動させて、駆動スリップを小さくして、回転速度差を低減するブレーキLSD制御が行われる。この場合において、車両が上り坂を走行している場合(S2がYES)には、開始しきい値がそうでない場合より、小さい値とされる(S4)。またぎ登坂路の走行中において、ブレーキLSD制御が早期に開始されることになるのであり、その結果、ブレーキLSD制御において、ブレーキ力の増加勾配が小さくなるため、作動音を小さくしたり、振動を小さくしたりすることができる。
(もっと読む)
ブレーキ倍力装置
【課題】 ブレーキ倍力装置とホイルシリンダとの間にブレーキ液圧制御ユニットが介在したとしても、良好なペダルフィーリングを得ることが可能なブレーキ倍力装置を提供すること。
【解決手段】 液圧制御ユニットの作動時と非作動時とで倍力装置の制御を異ならせ、液圧制御ユニットが作動したとしても入力部材の変位が小さくなるように制御することとした。
(もっと読む)
車両制御装置
【課題】タイヤの状態をできるだけ反映した各車輪の制御を実現すること。
【解決手段】コントローラ50が、各車輪の接地荷重FZ からコーナリングスティフネスkf,krを求めるのに用いる、ROM52に記憶させたタイヤ摩擦量の区分毎の相関データ(テーブル)を、タイヤ摩耗量の変化に応じて使い分ける。タイヤ摩耗量は、各センサ111,113,115,117の出力を用いて求めた走行距離の累計値からコントローラ50で推定、演算しても良く、外部入力端末60の操作により入力されたものであっても良い。このようにして求めたコーナリングスティフネスを用いて、各車輪の駆動および制動のうち少なくとも一方をそれぞれ独立して制御する際の制御パラメータを求めることで、制御内容がタイヤ摩耗量の状態に応じた正確なものとなる。
(もっと読む)
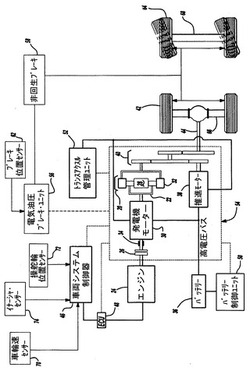
電動車両
【課題】左右の後輪を電動モータにより回転駆動する方式の電動車両において、安全にコーナリング特性を向上させる。
【解決手段】ブレーキトルク指令値演算部53において、PIDコントロール部51からフィードバックされた各スリップ率の差分と、ブレーキペダル開度検出部22により検出されたブレーキペダルの開度を示す信号とに基づいて、第1電動モータ7への第1ブレーキトルク指令値BT1及び第2電動モータ11への第2ブレーキトルク指令値BT2を演算し、モータ制御部47では、ブレーキトルク指令値演算部53によって演算された第1ブレーキトルク指令値BT1及び第2ブレーキトルク指令値BT2に基づいて第1電動モータ7及び第2電動モータ11のブレーキトルクを制御する。
(もっと読む)
車両用制御装置及び制御システム
【課題】車両を停止状態から走行状態へと移行させるに際し、走行方向とは逆方向へと車両が変位するおそれがあること。
【解決手段】図18(d)に一点鎖線にて示すようにユーザのブレーキ操作によって制動トルクを低減させる場合には、制動トルクと駆動トルクとの合計が、路面の勾配に起因した重力のうちの走行方向とは逆方向の成分と釣り合うトルク(勾配トルクTrg)に満たないために、車両が走行方向とは逆方向へと変位するおそれがある。そこで、車両の加速度がゼロ以上となるまで、駆動トルクと制動トルクとの和が勾配トルクTrgとなるように、制動力を操作する。
(もっと読む)
車両用加速度制御装置
【課題】オーバシュートやアンダーシュートおよびハンチングを防ぎつつ、かつ、目標加速度に対する実加速度の追従性をより高める。
【解決手段】目標加速度の微分値の微分値であるDDTGに基づいてPID制御の比例ゲイン、積分ゲインおよび微分ゲインを設定することで、目標加速度に対する実加速度の追従性をより高めた制御を行うことが可能となる。このように、真に追従性を高めたい場合にのみゲインを大きくすることで、オーバシュートやアンダーシュートおよびハンチングを防ぎつつ、かつ、目標加速度に対する実加速度の追従性をより高めることが可能となる。
(もっと読む)
車両用制御装置及び制御システム
【課題】車両の駆動力を生成するパワートレイン(エンジン10、自動変速装置14)と、車両の制動力を生成するブレーキアクチュエータ20とを操作することで実際の加速度を目標加速度にフィードバック制御するに際し、それぞれの操作量を算出する処理やその適合を簡易且つ適切に行うこと、更には操作量の算出を適切に行うことが困難なこと。
【解決手段】車両の実際の加速度を目標加速度に制御する際の要求トルクをパワートレインのみによっては生成できなくなると予測される場合、予めブレーキアクチュエータ20のポンプPoを起動する。そして、ブレーキアクチュエータ20による制動力の使用開始とともに、フィードバック制御の制御ゲインを変更する。
(もっと読む)
進行方向加速度推定装置、自動車、進行方向加速度推定方法および車両制御装置
【課題】車両の進行方向加速度をより高精度に推定すること。
【解決手段】自動車1Aは、水平面とほぼ平行な車体フロア面に対し、設定されたピッチ角γだけ前後に傾けられた前後加速度センサ4によって、車両に作用する前後加速度を検出する。そして、制駆動力センサ3FR,3FL,3RR,3RLの検出値の合計と前後加速度センサ4の出力値を用い、(1)式に従って路面傾斜角θを算出する。さらに、その路面傾斜角θを用いて算出した進行方向加速度αの積分値から、車体速vを算出する。したがって、通常の車両走行状態において、(1)式における分母sinγがゼロとなることを防止しつつ、積分を用いることなく路面傾斜角θを推定するため、路面傾斜角θをより高精度に推定できる。さらに、その路面傾斜角θを用いて、進行方向加速度αを算出するため、進行方向加速度αをより高精度に推定することができる。
(もっと読む)
車両のアンチロックブレーキ制御装置
【課題】車輪ブレーキのブレーキ力を調整し得るブレーキアクチュエータの作動を、車輪速度検出手段で検出された車輪速度ならびに車体速度に基づいて演算された目標車輪速度の比較結果に基づいて減少モード、保持モードおよび増加モードを切換えるようにしてブレーキ制御手段で制御する車両のアンチロックブレーキ制御装置において、ブレーキ力を増加する増加モードで目標ブレーキ力を最適化し、応答性および収束性を高める。
【解決手段】ブレーキ制御手段31は、増加モードでのブレーキ力の目標値を、今回の増加モード開始時のブレーキ力ならびに前回の減少モードでのブレーキ力の減少値に基づいて求めたフィードフォワード項に、車輪速度および目標車輪速度の偏差に基づいて求めたフィードバック項を加算して求め、増加モードでの車輪ブレーキのブレーキ力が前記目標値となるようにブレーキアクチュエータ5を制御する。
(もっと読む)
低圧アキュームレータを有する自動車ブレーキシステム
油圧配管4を有する自動車ブレーキシステム1であって、前記油圧配管を通して、ブレーキシリンダ8から車輪ブレーキモジュール6がブレーキ媒体によってブレーキ圧を加えられ、かつ低圧アキュームレータ13が、過剰なブレーキ媒体を一時的に受入れるために油圧配管に接続され、その際、前記低圧アキュームレータ13が、一時貯蔵されたブレーキ媒体を戻すために、リターンフロー配管12、および、リターンフロー配管12内に配設されたリターンポンプ14を介し前記油圧配管4に結合され、リターンポンプ14が、搬送性能の調整のために、各ブレーキサイクル中、搬送性能に対応するポンプ駆動の一期間に一度作動されるように周期的に制御される自動車ブレーキシステム1が、快適なペダル感覚で、特に高い稼動安全性を提供するものである。そのために、リターンフロー配管12内に配設されたリターンポンプ14に関連付けられた制御ユニット16が、ブレーキサイクル中のリターンポンプ14のポンプ駆動の回数に関する設定値を、所定の初期値から始めて、低圧アキュームレータ13内の充填状況を考慮し、および/または充填状況の時間微分を考慮して適宜適合させて提示する。 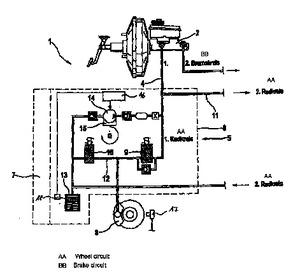 (もっと読む)
(もっと読む)
下り坂を運転する自動車の制御システム
【課題】 傾斜が急な道路上で運転するときに、ブレーキ・ペダルを運転者が作動させているか否かには関係なく、追加の制動モーメントを調節する坂下り制御システムを提供する。
【解決手段】 自動車の制動機器における坂下り制御システムは、運転者の作動には関係なく、アンチ・ロッキング制御機能および制動機能の双方に合わせて設計されている電気制御可能サービス・ブレーキ・システムと、自動車の個々の車輪に対して発生し、坂下り制御によって制御するそれぞれの操作対象変数である、制動圧力または制動モーメントの個々の調節を可能にするブレーキ・アクチュエータと、自動車の動作状態に関する変数を直接的または間接的に検出し、ブレーキ・ペダルが作動されているか否かには関係なく、傾斜が急な道路上で運転するときに、追加の制動モーメントを調節する、電子制御および/または規制のために設けられている電子制御ユニットとを備えている。
(もっと読む)
下り坂を運転する車両の制御システム
【課題】 傾斜が急な道路上で運転するときに、ブレーキ・ペダルを運転者が作動させているか否かには関係なく、追加の制動モーメントを調節する坂下り制御システムを提供する。
【解決手段】 自動車の制動機器における坂下り制御システムは、運転者の作動には関係なく、アンチ・ロッキング制御機能および制動機能の双方に合わせて設計されている電気制御可能サービス・ブレーキ・システムと、自動車の個々の車輪に対して発生し、坂下り制御によって制御するそれぞれの操作対象変数である、制動圧力または制動モーメントの個々の調節を可能にするブレーキ・アクチュエータと、自動車の動作状態に関する変数を直接的または間接的に検出し、ブレーキ・ペダルが作動されているか否かには関係なく、傾斜が急な道路上で運転するときに、追加の制動モーメントを調節する、電子制御および/または規制のために設けられている電子制御ユニットとを備えている。
(もっと読む)
二重測定スケールおよび高フルスケール値を有する集積化圧力センサ
二重測定スケールを有する圧力センサ(15)において、半導体材料のモノリシック体(16)は、第1主表面(16a)、バルク領域(17)、および圧力(P)が作用する感知部分(33)を有し、キャビティ(18)を、モノリシック体(16)に形成し、かつ可撓性を有して圧力(P)に応じて変形可能な薄膜(19)によって第1主表面(16a)から分離し、また感知部分(33)の内側に配置し、バルク領域(17)によって包囲し、圧力(P)の第1の値を感知可能な圧電抵抗型の低圧検出素子(28)を、薄膜(19)に集積化し、この低圧検出素子(28)は薄膜(19)の変形の関数として可変抵抗を有するものとする。さらに、同様に圧電抵抗型の高圧検出素子(29)を、感知部分(33)の内側のバルク領域(17)に形成し、この高圧検出素子(29)は圧力(P)の関数として可変抵抗を有する。高圧検出素子(29)は圧力(P)の第2の値を感知可能とする。  (もっと読む)
(もっと読む)
車両の走行推進力の制御方法、その方法を実施する装置とその用途
【課題】
車両の走行状態を任意の走行操縦にて所望状態に適合させること。
【解決手段】
この発明は、走行状態値の運転者指示値に対応する目標値(Ψ’ref )が走行状態値の検出された実際値(Ψ’)と比較されて、動揺モーメント分布が検出されて変更される車両の走行推進力を制御する方法に関する。この方法は、a.走行状態値の目標値(Ψ’ref )と走行状態値の実際値(Ψ’)との比較に基づいて車両の走行状態が決定され、b.所定の走行状態に依存して、予定走行状態に対応する新たな動揺モーメント分布が決定され、c.その新たな動揺モーメント分布が調整されることを実施される。さらに、この発明は、車両の前後車軸において動揺モーメント支持手段と車両の少なくとも一つの走行状態値(Ψ’)を検出するセンサーとを含む車両の走行推進力を制御する装置に関する。この装置は好ましくはヨーモーメントを補償するシステム(ESP)に使用され得る。  (もっと読む)
(もっと読む)
21 - 40 / 40
[ Back to top ]