
Fターム[3D246JB54]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 制御理論 (94)
Fターム[3D246JB54]の下位に属するFターム
Fターム[3D246JB54]に分類される特許
1 - 14 / 14
車両制動制御装置
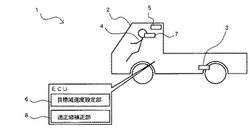
【課題】運転者の体格差によらず同じ制動感が体感される車両制動制御装置を提供する。
【解決手段】車両2を目標の減速度で減速させるよう制動する制動手段3と、車両2の運転者4の頭部位置を検出する頭部位置検出センサ5と、車両2の減速度と運転者4の頭部位置と頭部に生じる減速度との関係があらかじめ設定されており、この関係に頭部位置検出センサ5で検出された頭部位置を適用し、頭部に生じる減速度があらかじめ設定された適正値となるよう、制動手段3に与える目標の減速度を設定する目標減速度設定部6とを備える。
(もっと読む)
車両用ブレーキ液圧制御装置

【課題】ペダルフィーリングの悪化を抑えつつ、入口弁(常開型比例電磁弁)のハンチングを抑えることを目的とする。
【解決手段】制御部は、常開型比例電磁弁の通電量を第1勾配で減少させる際に、通電量を増加側にオフセットするオフセット制御を実行するオフセット手段を有し、オフセット手段は、電流検出手段で検出された電流値が所定の変動状態となるか否かを判定し(ステップS5)、所定の変動状態となる場合に(Yes)、オフセット制御を実行する(ステップS6)。
(もっと読む)
タイヤ接地状態推定装置
【課題】タイヤ接地状態の推定精度を向上させる。
【解決手段】転舵角、車速、及び前輪の路面摩擦係数に基づいて、前輪SAT推定値を推定し、車速に基づいて、後輪スリップ率推定値を推定し、転舵角、車速、及び後輪及び前輪の路面摩擦係数に基づいて、車両の横加速度推定値を推定する。一方、前輪のSAT検出値を検出し、後輪スリップ率検出値を検出し、車両の横加速度検出値を検出する。そして、前輪SATの推定値と検出値との差分で定義される前輪SAT推定誤差を演算し、後輪スリップ率の推定値と検出値との差分で定義される後輪スリップ率推定誤差を演算し、横加速度の推定値と検出値との差分で定義される横加速度推定誤差を演算する。そして、前輪SAT推定誤差、後輪スリップ率推定誤差、横加速度推定誤差のうち、少なくとも一つに応じて、後輪及び前輪の路面摩擦係数を補正する。
(もっと読む)
車両の挙動制御装置及び車両の挙動制御方法
【課題】車両の挙動を制御させるための複数の制御対象の制御要求値を適切に設定することができる車両の挙動制御装置及び車両の挙動制御方法を提供する。
【解決手段】要求値設定部26は、第1の制御対象に対する第1要求ヨーレートγ_act1を設定する第1要求値設定部40と、第1要求ヨーレートγ_act1に基づき駆動する第1の制御対象の第1ヨーレート推定値γs_act1を取得する第1推定値取得部41と、第1定常不足量TF1及び第1推定遅れ量SF1のうち少なくとも第1推定遅れ量SF1を算出する第1算出部42と、第2の制御対象に対する第2要求ヨーレートγ_act2を設定する第2要求値設定部43と、第2要求ヨーレートγ_act2に基づき駆動する第2の制御対象の第2ヨーレート推定値γs_act2を取得する第2推定値取得部44とを備えている。
(もっと読む)
車両挙動制御装置
【課題】前後駆動力配分制御とブレーキ制御とを協調させて、操舵応答性とトラクション性能とを適切に両立させる。
【解決手段】エンジン駆動力Fdを算出し、該エンジン駆動力Fdに基づいて一次遅れ処理を行って前後軸間の締結トルクCawdを算出してトランスファクラッチ駆動部31に出力する。一方、エンジン駆動力Fdの時間的変化ΔFdに基づいて時間の経過と共に減衰する駆動力の変化に応じた制動力Fdtdを一次進み処理を行って算出し、駆動力の変化に応じた制動力Fdtdを基とするアクセル感応目標ヨーモーメントMdtを算出し、ハンドル角速度を基とする操舵感応目標ヨーモーメントMstを一次進み処理を行って算出し、これらアクセル感応目標ヨーモーメントMdtと操舵感応目標ヨーモーメントMstを基に旋回内側内輪に付加する制動力を算出してブレーキ駆動部32に出力する。
(もっと読む)
車両用制御装置
【課題】実ヨーレートの急変の影響を受けることなく、実横加速度を適正に補正することができる車両用制御装置を提供することを目的とする。
【解決手段】車両用制御装置(制御部20)は、実ヨーレートYsの変化率が所定値以上か否かを判断する急変判定手段209と、舵角センサ92で検出する舵角量に基づいて規範ヨーレートYcを算出する規範ヨーレート演算手段202と、急変判定手段209によって変化率が所定値未満であると判断された場合には、実横加速度Gysを実ヨーレートYsに基づいて補正し、急変判定手段209によって変化率が所定値以上であると判断された場合には、実ヨーレートYsを規範ヨーレートYcに切り替えて実横加速度Gysを補正する補正手段220と、を備えている。
(もっと読む)
エンジン自動停止再始動制御装置
【課題】エンジン再始動時の車体の前後方向の振動をより抑制することができるエンジン自動停止再始動制御装置を提供する。
【解決手段】エンジン再始動を行う際に、ショック抑制ブレーキ制御を行い、実車軸トルク変化速度と理想車軸トルク変化速度との間の差である変化速度差に応じた制動トルクを発生させる。これにより、エンジン再始動時に生じる振動トルクを抑制することが可能となり、車体のショックを抑制することが可能となる。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供する。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値と下限値の間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値より大きくなることおよび下限値より小さくなることを防止する。
(もっと読む)
車両用走行制御装置
【課題】運転者に違和感を感じさせず、運転者の志向に合わせることができ、複数の個人が運転者として利用できる車両用走行制御装置を提供する。
【解決手段】先行車情報を検出する先行車センシング部2と、自車情報を検出する自車センシング部3と、過去の先行車情報及び自車情報を蓄積する学習データストア部4と、先行車情報と自車情報とパラメータとに基づいて自車が先行車に追従するための目標加速度をドライバモデル式により算出する目標加速度演算部5と、目標加速度演算部5により算出された目標加速度と運転者が手動で先行車に追従する運転をしたときの加速度との差を最小にするパラメータを同定して運転者固有の個人パラメータとする個人パラメータ部分同定部6とを備える。
(もっと読む)
運転支援装置
【課題】急ブレーキ操作を予測し、効率的で的確な運転支援を行うことを可能とする運転支援装置を提供する。
【解決手段】本発明の運転支援装置は、運転操作に係るデータを取得する運転操作データ取得手段と、運転状況に係るデータを取得する運転状況データ取得手段と、運転操作や運転状況と関係のない生理状態データと、運転操作データと、運転状況データと間の因果関係を、ベイジアンネットワークを用いることで確率的に定めたテーブルを更新するテーブル更新手段と、前記テーブル更新手段によって更新されたテーブルと現在の運転状況データとから急ブレーキの運転操作を予測する急ブレーキ操作予測手段と、を有すことを特徴とする。
(もっと読む)
ブレーキ制御装置およびブレーキ制御方法
【課題】回生協調制御時の不必要なブレーキの引きずりを抑制することが可能な技術を提供する。
【解決手段】ブレーキ制御装置において、回生ブレーキユニット10は、電動機の回生制御により回生制動力を発生させる。液圧ブレーキユニット20は、作動液の液圧制御により液圧制動力を発生させる。制御部は、運転者のブレーキ操作に応じて演算された目標制動力が満たされるように回生ブレーキユニット10および液圧ブレーキユニット20を制御するとともに、実行されている回生制動力を目標制動力から減ずることで目標となる液圧制動力を演算する。誤差抑制部は、回生制動力を算出する過程で用いられる最小単位未満の桁処理により生じる誤差を抑制する。
(もっと読む)
ソレノイドバルブを制御する方法
本発明は液圧システム内のソレノイドバルブ、とりわけ比例ソレノイドバルブ(1)を制御する方法に関する。本発明は、液圧システムのモデルを形成し、制御サイクルを定め、制御サイクル終了時における液圧システム内の圧力とソレノイドバルブのコイルに印加されるコイル電圧を、制御サイクル開始時の値と、液圧システムの構成要素の物理的パラメータと、液圧流体の温度とに基づいて推定する。  (もっと読む)
(もっと読む)
車両の運転支援装置
【課題】現在のみならず将来予測される危険度を考慮して最適な回避ルートを通過するように制御して安全性を向上させることができ、また、無駄な加速を抑制して自然な回避ルートの走行を可能とする。
【解決手段】制御ユニット5は、自車両1の周辺に存在する白線、ガードレール、側壁、及び、立体物のそれぞれを対象として、現在のトータルリスク関数を設定し、各対象の位置の時間的変化を予測してトータルリスク関数の時間的変化を予測して、このトータルリスク関数を自車両前方の各距離毎に変換し、この変換したトータルリスク関数と自車両の前後加速度ax0と横加速度ay0と走行時間の重みを表すパラメータとで評価関数Jを設定し、この評価関数Jが最小となる自車両の前後加速度ax0と横加速度ay0を制御量として演算する。
(もっと読む)
車輪を選択的に制動する第1手段と、後輪を旋回させる第2手段とを備えた自動車の進路を補正する装置
本発明は、四つのステアードホイール(12、14)を有する自動車(10)が辿る実際の進路を補正する装置に関する。本装置は、自動車(10)の四つの車輪(12、14)の各々又は組み合わせを制動することにより、第1基準進路(30)に対して車両の実際の進路を補正する第1手段(18、20)を有し、この第1補正手段(18、20)は、車両(10)の実際の進路と第1基準進路(30)の差異が起動閾値(32)を上回るときに使用される。本装置の特徴は、二つの後部ステアードホイール(14)を補正角度(A2)だけ旋回させることにより第2基準進路に対して車両(10)が辿る実際の進路を補正する第2手段を含むことである。  (もっと読む)
(もっと読む)
1 - 14 / 14
[ Back to top ]