
Fターム[3D246JB56]の内容
ブレーキシステム(制動力調整) (55,256) | 制御方法 (3,867) | 制御理論 (94) | 学習制御 (56)
Fターム[3D246JB56]に分類される特許
1 - 20 / 56
電動車両のブレーキ制御装置
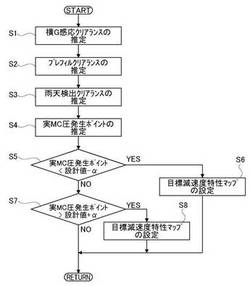
【課題】回生協調ブレーキ制御時、ブレーキパッドとロータとの間にクリアランス変化が発生しても、良好なブレーキフィーリングと回生エネルギーの確保を達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダと、ホイールシリンダと、VDCブレーキ液圧ユニットと、モータコントローラと、統合コントローラと、を備える。統合コントローラは、ブレーキ操作時、目標減速度を基本液圧分と上乗せ制動分(回生分と加圧分)で達成する回生協調ブレーキ制御を行う。そして、推定したブレーキパッドとロータとの間のクリアランス量が設計値のクリアランス量に対して変化する場合に、実MC圧発生ポイントでの目標減速度が、上乗せ制動分の最大値となるように、設計値からのクリアランス変化量に応じて目標減速度特性を設定する。
(もっと読む)
制動デバイスを備えた自動車用制動システムを制御する方法及び装置

【課題】制動デバイスを備えた自動車用制動システムを制御する方法及び装置の提供。
【解決手段】制動システムが制動デバイス40を備え、制動デバイス40が油圧制動ユニット41と回生制動ユニット42とを備え、かつブレーキペダル10の作動度と制動システムの特性を検出するように設計されている方法であって、制動システムの検出された特性に基づき、油圧制動ユニット41の油圧制動力特性曲線を計算するステップと、所定の基準に基づきかつ計算された油圧制動力特性曲線に応じて特性マップから回生制動ユニット42の発電機ベース制動力特性曲線を選択するステップと、計算された油圧制動力特性曲線と選択された発電機ベース制動力特性曲線に基づき、ブレーキペダル10の検出された作動度に従い油圧制動ユニット41と回生制動ユニット42を制御するステップとを含む。
(もっと読む)
車両用制御装置
【課題】道路の一区間(学習対象区間)の走行により得られる回生エネルギー量を精度良く推定することができる車両用制御装置を提供する。
【解決手段】学習手段70は、前記回生エネルギー学習制御において、車両6が道路の一区間である学習対象区間を走行しているときに蓄電装置56が少なくとも一時的に満充電状態であった場合には、学習データとして記憶する回生エネルギー量EGYrsを、蓄電装置56が終始満充電状態ではなかったと仮定して算出する。従って、蓄電装置56が満充電状態であればそのときの実際の回生エネルギー量EGYrsは零又は略零であるところ、そのように回生エネルギー量EGYrsが零又は略零であるとしては前記学習データは記憶されず、推定回生エネルギー量EGYersを精度良く推定するのに適した前記学習データを記憶することが可能である。
(もっと読む)
ブレーキシステム
【課題】増圧装置の作動が正常であるかどうかをチェックする。
【解決手段】入力遮断弁148の閉状態、高圧遮断弁312の閉状態において、小径側室112の液圧を、増圧リニア制御弁172の制御により増加させた後に、減圧リニア制御弁316の制御により減少させて、目標液圧とする。その後、増圧リニア制御弁172,減圧リニア制御弁316を閉状態として、高圧遮断弁312を開状態に切り換える。小径側室112の液圧であるブレーキシリンダ液圧センサ226の検出値が増加した場合には、メカ式増圧装置96の作動が正常であると判定することができる。
(もっと読む)
ブレーキ装置
【課題】意図しない制動力の発生を抑制できるブレーキ装置を提供すること。
【解決手段】ブレーキペダルの操作により進退移動する入力部材と、入力部材の操作ストロークを検出するストローク検出手段と、ストローク検出手段の検出結果に基づいてアクチュエータ(電動モータ)を制御するコントローラと、を備え、コントローラは、制御可能な状態になったときに、記憶された初期原点Ssをストローク検出手段(ストロークセンサ)の制御原点S*として設定して、ストローク検出手段の検出値Sに基づいてアクチュエータを制御し、入力部材が制御原点S*を越えて後退するごとに、そのときの入力部材の位置をストローク検出手段の制御原点S*として更新する。
(もっと読む)
制動履歴データベース作成装置及び作成方法
【課題】車両における省燃費運転の精度を向上すること。
【解決手段】車両の位置情報を取得する位置情報取得部11と、車両の制動装置が作動していることを判定する制動判定部12と、を備え、位置情報取得部11が取得した位置情報とともに制動装置の制動履歴が格納されるデータベース21を作成する。制動履歴取得部15は、位置情報取得部11が取得した車両の位置情報に基づいて当該車両の進路上にある制動履歴などのデータをデータベース21から取得する。
(もっと読む)
車両用情報処理装置
【課題】ドライバーにアクセルを再度踏み込ませる等の無駄な操作をさせることを防止することが可能な車両用情報処理装置を提供する。
【解決手段】運転支援装置10のECU30は、ドライバーの過去の減速操作における減速終了地点の平均値よりも車両の現在位置から遠い地点を車両を減速させるための基準として、交差点等の手前で車両を減速させるための情報処理を行なう。このため、車両を減速させるための基準はドライバーの過去の減速操作における減速終了地点の平均値よりも遠方とされることになる。このため、ドライバーの意図に反して減速終了地点が交差点等の手前となり過ぎて、ドライバーにアクセルを再度踏み込ませる等の無駄な操作をさせることを防止することができる。
(もっと読む)
ブレーキ制御装置およびこれを備えたブレーキシステム
【課題】通常の車両走行中のブレーキ作動時でのブレーキ異音の発生を効果的に抑制して、車両の静粛性や乗員の快適性を効果的に向上する。
【解決手段】ブレーキ液圧検出部43,44,45,46で検出したブレーキ液圧のデータ
、ブレーキパッド温度検出部47,48,49,50で検出したブレーキパッド温度のデー
タ、異音発生検出部52,53,54,55のブレーキ異音の発生の情報に基づいて異音の
発生エリアが記憶部58に記録される。異音発生条件成立判定部59が、通常走行中のブレーキ作動時のブレーキ力のデータおよびブレーキパッド温度のデータが記憶部58の異音の発生エリアになったと判定したとき、ブレーキ液圧変化信号出力部61がブレーキ液圧変化信号を出力する。
(もっと読む)
回生制動制御装置
【課題】エンジンブレーキ相当の制動力を適切に制御することで、回生効率を向上させることが可能な回生制動制御装置を提供する。
【解決手段】回生制動制御装置は、制動時において、回生制動力を発生可能に構成された回転電機を有する車両に好適に適用される。制御手段は、少なくとも回生制動力を用いて、アクセルがオフにされた際にエンジンブレーキ相当の制動力(エンジンブレーキ相当制動力)を発生させる制御を行う。具体的には、制御手段は、アクセルオフ時に発生させるエンジンブレーキ相当制動力を、車速が低いほど、当該車速が高い場合よりも大きくする制御を行う。これにより、回生による減速エネルギー回収量を増加させることができる。よって、回生効率を向上させることができ、燃費を向上させることが可能となる。
(もっと読む)
運転支援装置
【課題】車両の運転操作を行う過程で積み重ねられるドライバの心理に即した運転支援を実現することのできる運転支援装置を提供する。
【解決手段】車両の運転域における各交通情報下での操作態様を検出しつつ、それら検出された操作態様に関する情報を交通情報毎に関連付けして学習する。そして、前回の減速地点で行われた減速操作と次の減速地点に関連付けして学習されている情報とに基づいて次に実行すべき運転支援態様を決定する。
(もっと読む)
車両制御装置
【課題】データ量を抑えることができ、実現性の向上を図ることができる車両制御装置を提供する。
【解決手段】車両制御装置1では、運転者の通常ブレーキの減速度αnormalに基づいてカーブの入口に到達したときの車速Vcurve及びカーブへの進入時における最大車速Vthreshを求め、車速Vcurveが最大車速Vthreshよりも大きい場合に、運転支援制御を実施させている。このように、運転者の通常ブレーキの減速度αnormalを記憶するだけで、適切な運転支援を行うことができるため、運転者毎にカーブ等のパラメータを記憶する必要がない。したがって、データ記憶容量に記憶されるデータ量を抑えることができ、実現性の向上を図ることができる。
(もっと読む)
自動制動制御用ECU、車型学習方法および車両
【課題】自動制動制御用ECUを複数の車型の車両で共通化すること。
【解決手段】複数の異なる車型の車両に搭載され、車両の自動制動制御装置3を制御する自動制動制御用ECU1であって、車型および当該車型に対応するセンサの情報を、これらの情報を保持する車両ECU2から取得して記憶する車型情報学習部10と、車型情報学習部10が記憶した情報に基づいて車両に適合する制動制御パターンを選択する制動制御パターン選択部11と、を有する。
(もっと読む)
車両用制動装置
【課題】セルフサーボ効果の有無を考慮して電動アクチュエータの作動を制御する車両用制動装置を提供する。
【解決手段】電子制御ユニット21のCPU21aは、車両の減速に伴って、車速センサ24から入力した車速Vが所定の小さな車速V0以下となるとき、セルフサーボ効果が無効化したと判定する。次に、CPU21aは、現在、電動アクチュエータ13に供給しているモータ電流値Iに対応して前記効果が発生している場合の荷重と前記効果が無効化した場合の荷重との荷重差ΔFを決定し、この荷重差ΔFを荷重センサ22から入力した検出荷重Fに加算して補正する。そして、CPU21aは、補正した検出荷重Fと車両を減速させるために決定した目標荷重Fdとの差分を計算し、この差分に基づいてアクチュエータ13の駆動を制御する。これにより、前記効果の有無によってアクチュエータ13に供給する電流値Iの急増を防止し、連続性を保つことができる。
(もっと読む)
減速支援システム
【課題】車両の運転者に違和感を与えることを抑制しつつ、減速支援を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が右折又は左折する際に、車両の運転者が、右折又は左折のためにハンドルの操舵を開始する位置である操舵開始位置を学習する学習システム(109)と、運転者の右左折意思を確認する意思確認手段(109)と、車両の現在位置と、学習された操舵開始位置との間の距離を算出可能な距離算出手段(109)と、意思確認手段によって運転者の右左折意思が確認され、且つ学習システムによって操舵開始位置が学習されている場合、距離算出手段によって算出された距離に応じて減速支援を行う減速支援手段(109)とを備える。
(もっと読む)
車両の制御装置
【課題】自動車等の車両において、好適に減速制御を実行する。
【解決手段】車両の制御装置は、減速対象地点における運転者の減速行動を学習する学習手段(210)と、車両が減速対象地点に接近している場合に、学習された減速条件を用いて減速制御を行うべきか否かを判定する判定手段(220)と、減速制御を行うべきと判定された場合に、学習された減速行動に応じた減速制御を行う減速制御手段(230)と、減速制御を行うべきでないと判定された場合に、運転者による減速操作及び該減速操作の終了を検出する減速操作検出手段(130)と、減速操作が終了した時点から、減速操作を引き継ぐと共に減速制御を完了させるべき減速目標地点までの減速を補完するような減速パターンを演算する演算手段(240)と、減速パターンに応じた補完減速制御を行う補完減速制御手段(250)とを備える。
(もっと読む)
車両の制御装置
【課題】自動車等の車両において、適切なタイミングで運転支援制御を実行する。
【解決手段】車両の制御装置は、車両が停止する際の状況を検出する状況検出手段130と、車両が停止する際の運転者による減速タイミングを検出する減速検出手段140と、状況及び減速タイミングを互いに関連づけて学習を行う学習手段120と、学習後に、走行中の車両が学習された状況に近い状態となったことを認識する状況認識手段150と、状況に近い状態であることが認識された場合に、学習された状況に関連づけられた減速タイミングに応じて運転支援制御を行う運転支援制御手段160とを備える。
(もっと読む)
運転学習システム及び運転支援システム
【課題】車両の運転者が期待する制御を行う。
【解決手段】運転学習システム(10)は、車両(1)に搭載され、車両の運転者に係る運転挙動を学習する運転学習システムである。該運転学習システムは、車両が交差点を通過中であり、且つ車両が交差点を右折又は左折することを条件に、車両が交差点を右折又は左折し始めた後に、(i)運転者が車両を右折又は左折させるためにハンドルを操舵した方向とは反対方向にハンドルを操舵し始めた時点における車両の交差点内の位置である第1位置、及び(ii)運転者がアクセルペダルを踏下し始めた時点における車両の交差点内の位置である第2位置を記録する記録手段(109)と、記録された第2位置から記録された第1位置を差し引いた差分を計算する計算手段(109)と、計算された差分と閾値とを比較した結果に応じて、運転挙動を学習する際に記録すべき項目を変更する変更手段(109)とを備える。
(もっと読む)
車両用運転支援装置
【課題】運転者の運転感覚に合致した最適な自動減速制御を行なうことが可能な車両用運転支援装置を提供すること。
【解決手段】車両が特定の位置を走行する際に自動減速制御を行なう制御手段を備える車両用運転支援装置であって、運転者のアクセル操作を検出するアクセル操作検出手段と、前記運転者のブレーキ操作を検出するブレーキ操作検出手段と、を備え、前記制御手段は、前記アクセル操作検出手段及び前記ブレーキ操作検出手段の検出結果を参照して前記運転者が一連の特定操作を行なったと判定した場合に、該一連の特定操作に含まれる操作の行なわれたタイミングを学習し、該学習したタイミングに基づいて、前記自動減速制御の制御区間を決定することを特徴とする、車両用運転支援装置。
(もっと読む)
車両用ブレーキ制御装置
【課題】ポンプ漏れ量を加味してポンプ漏れが無い場合と同様の運転挙動制御が行えるようにする。
【解決手段】差圧制御弁によって規定差圧を発生させつつ、各規定差圧に対応したポンプ漏れモータ回転数を求め、規定差圧に対するポンプ漏れモータ回転数特性を記憶する。この規定差圧に対するポンプ漏れモータ回転数特性を利用して、運動挙動制御によってモータを駆動するときには、ポンプ漏れを加味したモータ目標回転数にてモータを駆動する。これにより、ポンプ漏れが発生していても、ポンプ漏れが発生していない場合と同じ応答性で目標差圧を発生させることが可能となる。したがって、差圧制御弁によって目標差圧を発生させることで、車両の運動挙動制御を行う車両用ブレーキ制御装置において、ポンプ漏れ量を加味してポンプ漏れが無い場合と同様の運転挙動制御を行うことが可能となる。
(もっと読む)
運転支援装置及び運転支援方法
【課題】交差点Xに対する運転支援を、より適切なタイミングで実施可能な運転支援の技術を提供する。
【解決手段】自車両の進行方向前方に存在する交差点Xに対する運転者の支援を行う運転支援の技術である。自車両に掛かる走行抵抗βを推定し、上記推定する走行抵抗βと自車両の車速Vとに基づき、上記交差点Xに接近する際の運転者による加減速指示の操作を予測する。そして、自車両の進行方向前方に存在する交差点Xまでの距離Lと、上記予測した加減速指示の操作と、運転者による加減速指示の操作とに基づき、運転支援が必要と判定すると運転者の支援を行う。
(もっと読む)
1 - 20 / 56
[ Back to top ]