
Fターム[3D301AB08]の内容
Fターム[3D301AB08]の下位に属するFターム
発進時 (48)
Fターム[3D301AB08]に分類される特許
1 - 20 / 266
立体加速度値の重力細分化制御装置
【課題】 車両及び搭乗者に制止時以外の加速度が検出された場合に、その加速度に対し立体座標に於ける点対称となるように車両や座席の傾き及び高さを素早く調節することによって、搭乗者及び走行への危険性が増す状態を軽減もしくはなくすようにする立体加速度値の重力細分化制御装置を提供する。
【解決手段】 単体加速度センサーの高速な情報をXYZ軸の立体加速度値として算出し、その立体加速度値を基にダンパの加減圧を個別制御し車両や座席の高さや角度を常時変化させて、現在の走行状況もしくは予め登録している走行状況に於ける加速度を相殺する機能を搭載する基盤を設けた立体加速度値の重力細分化制御装置を特徴とする。
(もっと読む)
車両のロール角推定方法及び装置
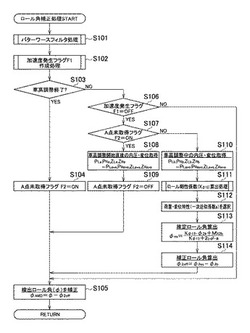
【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】車両に発生する加速度が予め設定された所定加速度以上である場合、更新禁止状態であると判定し、所定加速度未満である場合、更新禁止状態ではないと判定する。更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車両挙動制御装置および車両挙動制御方法

【課題】車両の走行状態に応じた挙動制御をより適切に行うと共に、アクチュエータの耐久性の低下を抑制する。
【解決手段】車体の上下挙動を取得し、取得した上下挙動が閾値th1よりも大きいときに、上下挙動に応じて目標制動力Pbを制御する。また、取得した上下挙動が閾値th2(th2>th1)よりも大きいときに、目標制動力Pbを0に制限する。また、減速感を抑制するために、目標制動力Pbを上限値Pmax以下に制限すると共に、立ち上げ時には演算周期毎の増加量をΔPu以下に制限する。その後は、上下挙動の低減に伴って、目標制動力Pbを減圧させてゆく。このときは、制動力の消失感を抑制するために、演算周期毎の減少量をΔPd以下に制限する。
(もっと読む)
鞍乗り型の乗り物の制御装置および制御方法
【課題】一例として自動二輪車のような鞍乗り型の乗り物を対象として、その加速時や制動時における車輪のスリップを抑制し、ひいては乗り物の動力性能および制動能力の向上を図る。
【解決手段】乗り物の走行中に例えば前後の車輪の緩衝装置4,18の特性を変更し、乗り物の姿勢を変化させることで、各車輪の路面に対する接地荷重の分布を変更可能な荷重分布変更手段と、乗り物の走行中に、前後の車輪のうちいずれか一方のスリップを抑制するための抑制条件が満たされたことを判定するスリップ抑制条件判定手段91,92と、その条件の満たされたことが判定された場合、条件の満たされていない場合に比べて前記一方の車輪の接地荷重が増大するように、荷重分布変更手段を制御する荷重分布制御手段93と、を備える。
(もっと読む)
サスペンション制御装置及びサスペンション制御方法
【課題】ストローク速度が微低速域であっても車両姿勢をより精度良く制御可能とする。
【解決手段】車両の上屋挙動の検出値に基づき第1目標制御量A1を算出すると共に、車両の制駆動力から推定した上屋挙動に基づき第2目標制御量A2を算出する。その算出した第1目標制御量A1及び第2目標制御量算出手段に基づき最終目標制御量Aを算出する際に、上屋挙動が小さい場合、該上屋挙動が大きい場合に比べて第2目標制御量A2を優先して最終目標制御量Aを算出する。そして、その最終目標制御量Aに基づいて、サスペンションのストロークを制御可能なアクチュエータ15を駆動制御する。
(もっと読む)
車輪位置可変車両
【課題】 簡単な構成で、車両の利便性と車両の挙動安定性の向上を図るとともに、より自由な車両挙動を実現できる車輪位置可変車両を提供する。
【解決手段】 各車輪390に設けられ、車体100に対する車輪の向きを変更する転舵アクチュエータ340と、各車輪390と車体100との間にそれぞれ設けられ、各車輪390を所定の軌道(車輪ユニット移動軌道200)上の任意の位置に移動させるトレッド&ホイールベース変更アクチュエータ350と、走行状態に応じた目標ジオメトリに基づいて、トレッド&ホイールベース変更アクチュエータ350に対し車輪位置変更指令を出力するコントローラ500と、を備え、コントローラ500は、加速度方向側の車輪から重心位置までの距離を、加速度方向と反対側の車輪から重心位置までの距離に対して長くなるように設定する。
(もっと読む)
電気自動車のリヤサスペンション構造
【課題】インホイールモータを搭載した電気自動車における、発進時や加速時のモータ駆動力による車体姿勢の変化を抑制し、車両の操縦安定性を向上させるとともに、モータのトルク変動に伴う車体への振動入力の伝達を抑制し、車体振動を低減させる。
【解決手段】インホイールモータに締結された後輪1のハブキャリア1aに、アッパトレーリングリンク5とロアトレーリングリンク6の後端をそれぞれ枢着し、両トレーリングリンクの前端を車体取付ブラケット13を介して車体に枢支するとともに、車体取付ブラケット13を車体取付部14との間に防振手段であるゴム15を装着して車体に固定する。
(もっと読む)
車体すべり角推定装置および車両姿勢制御装置
【課題】車体の横すべり角を精度良く推定することのできる車体すべり角推定装置および車両姿勢制御装置を提供する。
【解決手段】車体すべり角推定装置4は、前輪31,32および後輪33,34が設けられた車体2の横すべり角を推定する。この車体すべり角推定装置4は、前輪31,32の舵角と、前輪31,32に対して作用する横力である前輪横力と、後輪33,34に対して作用する横力である後輪横力と、車体2の重心と前輪31,32の距離と、車体2の重心と後輪33,34の距離と、車体2のヨーレートと、車速とに基づいて、車体2の横すべり角を推定する。
(もっと読む)
外力検出が可能な防振装置
【課題】入力荷重の高精度な検出を、充分な耐久性および実用性をもって実現することが可能とされた、新規な構造の外力検出が可能な防振装置を提供すること。
【解決手段】誘電性の弾性材からなる誘電体層20の両面に対して導電性の弾性材からなる一対の電極膜22,22を設けた静電容量型センサ18が、第1の取付部材12と第2の取付部材14の間への外力作用に際しての本体ゴム弾性体16への引張力の作用方向に伸びる状態で配設されて、本体ゴム弾性体16に固着されている。
(もっと読む)
車両挙動制御装置
【課題】制動装置による車両の挙動に対する介入を抑制し、燃費の低下を抑制することが可能な車両挙動制御装置を提供する。
【解決手段】制御ユニット1は、車両100の走行状態に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7を制御する装置制御部10と、装置制御部10から制御対象の装置に対する制御量を示す情報を取得する制御量取得手段111、及び制御量取得手段111が取得した情報に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7の制御量を減少させる指令信号を出力する制御量調整手段112を有する協調制御部11とを備える。
(もっと読む)
車両のサスペンション装置
【課題】 エアバネ装置と、アクティブ制御を行う電磁アクチュエータとを備えたサスペンション装置において、実車高hと目標車高h*とのずれを小さくして、乗り心地の低下を抑制する。
【解決手段】 車高偏差演算部121は、目標車高h*から実車高hを減算することで車高偏差Δhoを演算する。ローパスフィルタ処理部122は、車高偏差Δhoに含まれる高周波ノイズ成分を除去した車高偏差Δhを演算する。モータ力補正量演算部123は、車高偏差Δhに車高補償ゲインKhを乗じることによりモータ力補正量Δfhを演算する。目標モータ力補正演算部124は、目標モータ力演算部116から出力された目標モータ力fmotor*に、モータ力補正量演算部123から出力されたモータ力補正量Δfhを加算して、最終的な目標モータ力fmotor*を求める。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】走行している車両の状態に基づいてパラメータ(指標)を求め、前記車両に搭載されているアクチュエータの制御量をそのパラメータに基づいて決定する車両の制御装置において、前記パラメータに対する前記制御量を複数のアクチュエータ毎に予め設定しておき、前記パラメータが求められた場合にその単一のパラメータに基づいて前記複数のアクチュエータ毎の制御量を求める(ステップS31,S32,S33)とともにその制御量に基づいて各アクチュエータを制御するように構成されている。
(もっと読む)
車両用制御装置
【課題】車両の旋回性能を向上させることができる車両用制御装置を提供すること。
【解決手段】旋回度増加期の車速がUS限界値を超え、ステア特性がアンダステアになる恐れがある場合には、左右の後輪2RL,2RRの旋回内輪のキャンバ角を旋回外輪のキャンバ角よりも大きくなるようにネガティブキャンバ方向へ調整することで、左右の後輪2RL,2RRの旋回内輪に発生するキャンバスラストを旋回外輪に発生するキャンバスラストよりも大きくして、ステア特性をオーバステア傾向にするためのヨーモーメントを車両1に作用させることができる。よって、アンダステアを抑制することができる。
(もっと読む)
車両用制御装置
【課題】タイヤの偏磨耗を抑制して、タイヤの寿命を向上させる車両用制御装置を提供すること。
【解決手段】車両用制御装置によれば、車両の状態量が所定の条件を満たすと判断される場合に、キャンバ角調整装置が駆動され、前輪および後輪の少なくとも一つにネガティブキャンバが付与される。一方、水平面に対する車両の前後方向の傾きが所定の傾き以上であると判断される場合に、キャンバ角調整装置が駆動され、重力方向の下側に位置する前輪または後輪のキャンバ角が、付与されるネガティブキャンバのキャンバ角より絶対値が小さくなるように調整される。その結果、坂道において、平坦路に比べて接地荷重が増加する側のタイヤの接地面積を増加させることができ、タイヤの偏磨耗を抑制してタイヤの寿命を向上させる。
(もっと読む)
車両用キャンバ角制御装置
【課題】車輪のキャンバ角を適切に制御し、車両の走行安定性及び燃費を向上させる車両用キャンバ角制御装置を提供する。
【解決手段】車輪と、車輪のうち後輪のキャンバ角を調整するキャンバ角調整機構44と、を備えた車両に用いられる車両用キャンバ角制御装置であって、車両の状態量を取得する状態量取得部61a,62a,63aと、状態量取得部61a,62a,63aにより取得された車両の状態量に応じて、キャンバ角調整機構44を制御する制御部100と、を備え、制御部100は、キャンバ角調整機構44を制御することにより後輪に以下の条件式(1)を満足する角度のネガティブキャンバを付与する。−4°≦C≦−3°・・・(1)ただし、Cはネガティブ側を負としたキャンバ角度である。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角の変更に伴う車両の挙動特性の変化に関する指標値を精度よく算出し得る車両用制御装置を提供する。
【解決手段】車両用制御装置100は、車両の状態に応じてキャンバ角調整装置44を制御し、車両の後輪のキャンバ角を調整する。車両用制御装置100は、ヨーレートセンサ装置81で検出されたヨーレートYを、ステアリングセンサ装置63Aで検出されたステア角Sで除算し、単位ヨーレートゲインを算出する。車両用制御装置100は、ステア角変化量SVが0である対象基準時に基づいて、算出対象期間TPを特定し、算出対象期間TP内の単位ヨーレートゲインに基づく期間内平均値を算出する。
(もっと読む)
車両
【課題】車輪のキャンバ角を調整するキャンバ角調整機構を備えた車両に対して燃費を向上する。
【解決手段】車輪と、車輪のうち後輪のキャンバ角を調整するキャンバ角調整機構44と、を備えた車両であって、車両の状態量を取得する状態量取得部61a,62a,63aと、状態量取得部61a,62a,63aにより取得された車両の状態量に応じて、キャンバ角調整機構44を制御する制御部100と、を備え、後輪は、以下の条件式(1)を満足する。A≦85・・・(1)ただし、Aは惰行係数である。
(もっと読む)
車両
【課題】車両が過剰に傾斜させられてしまうことがなく、旋回安定性を高くすることができるようにする。
【解決手段】傾斜部位を路面に対して傾斜させるためのアクチュエータと、走行用の駆動部と、横加速度を検出する横加速度検出部と、横加速度に基づいてアクチュエータを駆動する傾斜制御処理手段と、加速操作量を制限する条件が成立するかどうかを判断する制限条件成立判断処理手段と、加速操作量を制限する条件が成立する場合に、加速操作量を制限する加速操作量制限処理手段と、加速操作量に基づいて走行用の駆動部を駆動する走行駆動制御処理手段とを有する。制限された加速操作量に基づいて車両の走行用の駆動部が駆動されるので、車両が過剰に傾斜させられてしまうことがなくなる。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角の変更に伴う車両の挙動特性の変化を報知し得る車両用制御装置を提供する。
【解決手段】車両用制御装置100は、車両の状態に応じてキャンバ角調整装置44を制御し、車両の後輪のキャンバ角を調整する。車両用制御装置100は、ヨーレートセンサ装置81で検出されたヨーレートYを、ステアリングセンサ装置63Aで検出されたステア角Sで除算し、単位ヨーレートゲインを算出する。車両用制御装置100は、算出対象期間TP内の単位ヨーレートゲインに基づく期間内平均値を算出し、右操舵時及び左操舵時の期間内平均値を平均し表示用ヨーレートゲインを算出する。車両用制御装置100は、ヨーレートゲインモニタ画面85に表示することで、第1キャンバ状態及び第2キャンバ状態の表示用ヨーレートゲインの差を報知する。
(もっと読む)
キャンバ制御装置
【課題】進行方向を変えて交差点を通過する際の車両の安定性を高くすることができるようにする。
【解決手段】車両のボディと、複数の車輪と、車輪にキャンバを付与するためのキャンバ可変機構と、車両が交差点を通過する際に、車両の加速状態に対応させて設定された交差点通過用のキャンバ付与条件が成立したかどうかを判断する交差点通過安定キャンバ判定処理手段と、交差点通過用のキャンバ付与条件が成立した場合に、車輪にキャンバを付与するキャンバ付与処理手段とを有する。車両が、交差点に進入し、進行方向を変えた後、加速しながら交差点から退出するときに、過剰な遠心力が発生しても、車両の安定性を高くすることができる。
(もっと読む)
1 - 20 / 266
[ Back to top ]