
Fターム[3D301EB44]の内容
車体懸架装置 (72,824) | 制御対象 (5,102) | 他(サス以外)との統合制御 (556) | 制動制御 (174)
Fターム[3D301EB44]に分類される特許
1 - 20 / 174
車両のロール角推定方法及び装置
【課題】サスペンションの変動状態や積荷の状態変化に因らず、自動車高調整非実行時のロール角を精度良く求めることが可能な方法及び装置の提供。
【解決手段】異なる2つの時点での変位及び内圧値(第1及び第2の変位と第1及び第2の内圧値)を用いて車高調整非実行時のロール角φ2esを求める第1の方法と、1つの時点での変位及び内圧値(第2の変位と第2の内圧値)と、変位及び内圧値の測定前に記憶された所定のロール剛性係数Kφ13newとを用いて車高調整非実行時のロール角φ2esを求める第2の方法とを、サスペンションの変動状態や積荷の状態変化に応じて適宜選択して用いる。
(もっと読む)
車両のロール角推定方法及び装置

【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を所望の精度で求めることが可能な方法及び装置の提供。
【解決手段】測定された第1及び第2の変位並びに第1及び第2の内圧値から、車両固有のロール剛性係数Kφ13を算出し、その後の任意の時点で測定された変位及び内圧値と上記算出したロール剛性係数Kφ13(Kφ13new)とに基づき、自動車高調整が行われなかった場合のロール角φ2esを求める。
(もっと読む)
車両のロール角推定方法及び装置
【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を求めることが可能な方法及び装置の提供。
【解決手段】左右サスペンションの任意の時点において測定された変位及び内圧値から、ロール角と左右サスペンションによるロールモーメントとをそれぞれ算出し、左右サスペンションの測定内圧平均値に対応する荷重−変位特性を、自動車高調整が行われなかった場合の左右サスペンションに共通の荷重−変位特性として選択し、算出したロール角及びロールモーメントと、選択した荷重−変位特性と、サスペンションを装着した車両固有の値として変位及び内圧値の測定前に記憶されたロール剛性係数とに基づき、自動車高調整が行われなかった場合のロール角を求める。
(もっと読む)
車両運動制御装置及びサスペンション制御装置
【課題】 制動力制御手段と協働して車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができる車両運動制御装置を提供する。
【解決手段】 GVC制御部41によって車体1側に発生するピッチをピッチレイト推定部48で推定する。このピッチレイト推定値とピッチレイトセンサ11からの実ピッチレイトのうち、値の大きい方を最大値選択部49で選択し、この最大値をピッチ制御部24の差演算部26にピッチレイト信号として出力する。このため、ピッチ制御部24では、前記最大値と目標ピッチレイトとに基づいてロール感を向上するためのピッチ制御による目標減衰力を算出する。GVC制御部41によって発生するピッチレイトが大きい場合には、ピッチを抑えるように制御する。
(もっと読む)
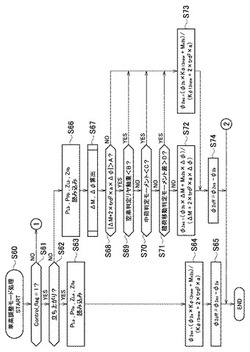
車両挙動制御装置および車両挙動制御方法
【課題】車両の走行状態に応じた挙動制御をより適切に行うと共に、アクチュエータの耐久性の低下を抑制する。
【解決手段】車体の上下挙動を取得し、取得した上下挙動が閾値th1よりも大きいときに、上下挙動に応じて目標制動力Pbを制御する。また、取得した上下挙動が閾値th2(th2>th1)よりも大きいときに、目標制動力Pbを0に制限する。また、減速感を抑制するために、目標制動力Pbを上限値Pmax以下に制限すると共に、立ち上げ時には演算周期毎の増加量をΔPu以下に制限する。その後は、上下挙動の低減に伴って、目標制動力Pbを減圧させてゆく。このときは、制動力の消失感を抑制するために、演算周期毎の減少量をΔPd以下に制限する。
(もっと読む)
発進補助装置およびこれを搭載した発進補助車両
【課題】車高が変化した場合であっても車体の傾斜状態から路面の傾斜状態を適正に推定して確実に発進補助を行う。
【解決手段】ブレーキペダル9に対する操作に応じて制動力を発生するディスクブレーキ8と、車体1の前後加速度G(傾斜状態)を検出する前後Gセンサ14と、前後Gセンサ14の検出結果に基づいて路面の傾斜度合いB’を推定する路面状態推定部45と、路面の傾斜度合いB’に基づいて路面が坂道であると判定された場合、ブレーキペダル9に対する操作の解除後にもディスクブレーキ8に制動力を保持させる発進補助装置11において、エアスプリング5のストロークSを検出するストロークセンサ18を更に備え、路面状態推定部45が、前後加速度Gに基づく路面(車体)の傾斜度合いBをストロークSを用いて補正することで路面の傾斜度合いB’を正確に推定できるようにする。
(もっと読む)
旋回走行制御装置、旋回走行制御方法
【課題】車高に比べてトレッド幅の狭い車両の旋回性能を改善する。
【解決手段】前後輪のロール剛性に対して制限値Kφminを設定する。そして、電動スタビライザ4F及び4Rを駆動制御し、前後輪のロール剛性を個別に調整することで、前後輪のロール剛性を制限値Kφminよりも大きくする。また、前輪における旋回内輪の輪荷重が0になる前後輪ロール剛性配分Pを上限値Pmax=a1Q+b1で定義し、前輪における旋回内輪の輪荷重が0になる前後輪ロール剛性配分Pを下限値Pmin=a2Q+b2で定義する。そして、前後輪ロール剛性配分Pが上限値Pmaxより小さく、且つ下限値Pminより大きくなるように、電動スタビライザ4F及び4Rを駆動制御して、前後輪のロール剛性を個別に調整する。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
鞍乗り型の乗り物の制御装置および制御方法
【課題】一例として自動二輪車のような鞍乗り型の乗り物を対象として、その加速時や制動時における車輪のスリップを抑制し、ひいては乗り物の動力性能および制動能力の向上を図る。
【解決手段】乗り物の走行中に例えば前後の車輪の緩衝装置4,18の特性を変更し、乗り物の姿勢を変化させることで、各車輪の路面に対する接地荷重の分布を変更可能な荷重分布変更手段と、乗り物の走行中に、前後の車輪のうちいずれか一方のスリップを抑制するための抑制条件が満たされたことを判定するスリップ抑制条件判定手段91,92と、その条件の満たされたことが判定された場合、条件の満たされていない場合に比べて前記一方の車輪の接地荷重が増大するように、荷重分布変更手段を制御する荷重分布制御手段93と、を備える。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】車体を旋回内側に傾動させるときの旋回性能を改善することである。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を設定し、設定した目標対地傾斜角φ*に応じて、駆動モータ3を駆動制御する。そして、車体の目標ヨーレートγ*を設定し、目標ヨーレートγ*及び車体のロール方向に沿った旋回内側への傾斜角に応じて、車体のヨーレートを制御する。具体的には、操舵角及び車速に応じて、車体の目標ヨーレートγ*を設定し、車体をロール方向に沿って旋回内側に傾斜させるときのキャンバスラストに起因したヨー運動分に相当するキャンバスラスト分補償量δcを算出する。そして、目標ヨーレートγ*及びキャンバスラスト分補償量δcに応じて、車体のヨーレートを制御する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】旋回走行時に車体を旋回内側に傾動させる制御の精度を向上させる。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を算出し、旋回走行時における旋回外側へのロール運動分に相当する補償量φrを算出する。そして、目標対地傾斜角φ*及び補償量φrに応じて、駆動モータ3を駆動制御する。また、一次の応答遅れ特性をもつ車両モデル(Gy0(s))に従い、横加速度に応じて補償量φrを算出すると共に、車両モデル(Gy0(s))の時定数を、ロール等価粘性Cφとロール剛性Kφとの比に応じて決定する。また、車両モデル(Gy(s))に従い、運転者のステアリング操作及び車速に応じて、車体の横加速度を推定し、推定した横加速度に応じて補償量φrを算出する。
(もっと読む)
車両
【課題】前輪と後輪に付与する駆動力を調整することで車高を変更することができるようにした車両を提供する。
【解決手段】車体12と、車体12の進行方向前側に設けられる前輪14と、車体12の進行方向後側に設けられる後輪16と、前輪14に駆動力を付与する前輪電動モータ18と、後輪16に駆動力を付与する後輪電動モータ20と、前輪14と車体12とを接続する前輪サスペンション22と、後輪16と車体12とを接続する後輪サスペンション24と、前輪サスペンション22および後輪サスペンション24を通じて車体12に重力方向における所定の荷重が生じるように、前輪電動モータ18が前輪14に付与する駆動力の大きさおよび後輪電動モータ20が後輪16に付与する駆動力の大きさを調整する調整手段26とを有するように構成する。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】車両の走行状態に応じた挙動制御をより適切に行うこと。
【解決手段】車速を取得する車速取得手段と、車体の上下挙動を取得する上下挙動取得手
段と、前記上下挙動取得手段が取得した車体の上下挙動の最大値を取得する上下挙動最大
値取得手段と、前記上下挙動最大値取得手段が取得した上下挙動の最大値と、前記車速取
得手段が取得した車速とに基づいて、制動力の上限を示す上限指令値を設定する上限指令
値設定手段と、前記上下挙動最大値取得手段が取得した上下挙動の最大値と、前記上限指
令値設定手段が設定した前記上限指令値とに基づいて、制動力の指令値を設定する制動力
指令値設定手段と、前記制動力指令値設定手段が設定した制動力の指令値に基づいて、車
輪に対する制動力を付与する制動手段とを備える。
(もっと読む)
車両制御装置および車両制御方法
【課題】レーン移動動作を行う際に車両の姿勢を安定させることができなかった。
【解決手段】自車両の移動先の目標レーンを示す情報を含む推奨経路情報と、前記自車両が走行している自車走行レーンを示す情報を含む自車位置情報とを取得し、前記自車走行レーンが前記目標レーンと異なる場合に、前記自車両がレーン移動動作を行う予定であることを予測するレーン移動予測手段と、前記自車両がレーン移動動作を行う予定であると予測された場合に、前記自車両の姿勢を安定させるための安定制御を開始させるための開始条件を満たすか否かを判定する開始条件判定手段と、前記開始条件を満たすとき、前記安定制御を開始させる安定制御手段と、を備え、前記開始条件判定手段は、前記自車両がレーン区画線を跨いだ場合に前記開始条件を満たすと判定する。
(もっと読む)
車両挙動制御装置
【課題】制動装置による車両の挙動に対する介入を抑制し、燃費の低下を抑制することが可能な車両挙動制御装置を提供する。
【解決手段】制御ユニット1は、車両100の走行状態に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7を制御する装置制御部10と、装置制御部10から制御対象の装置に対する制御量を示す情報を取得する制御量取得手段111、及び制御量取得手段111が取得した情報に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7の制御量を減少させる指令信号を出力する制御量調整手段112を有する協調制御部11とを備える。
(もっと読む)
油圧緩衝器
【課題】 車両の加減速変化に応じて直ちに車両の姿勢を制御できるように、その応答性を向上すること。
【解決手段】 油圧緩衝器10において、ピストンリング90の背圧室に圧力を付与する背圧付与手段93を設け、車両姿勢制御装置100によって、背圧付与手段93が背圧室91に付与する圧力を車両の加減速状態に応じて制御することにより、車両の姿勢を制御可能にするもの。
(もっと読む)
車体姿勢制御装置
【課題】 車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができるようにした車体姿勢制御装置を提供する。
【解決手段】 車両走行時のタイヤが常用領域にある間は、ロールレイトに応じて目標ピッチレイトを算出するピッチ制御部23の方をロール抑制部18よりも優先させる。この場合、ピッチ制御部23で算出した目標減衰力に重みを与え、前記目標ピッチレイトとなるように各ダンパ6,9の減衰力特性を制御する。タイヤの路面グリップ状態が悪い限界領域では、ピッチ制御部23よりもロール抑制部18の方を優先させ、ロール抑制部18で算出した目標減衰力に重みを与える。これにより、ロール抑制制御量を大きくするように各ダンパ6,9の減衰力特性を制御する。
(もっと読む)
サスペンション制御装置
【課題】 輪荷重増減の応答性と絶対量を制御することができ、車両をより安全に運転制御することができるようにする。
【解決手段】 複数の車輪2,3のうち輪荷重を増加させる車輪側に設けられた減衰力可変ダンパ6,9の減衰力特性を、縮み行程中の初期をハード側とし後期をソフト側に切替える縮み行程ハード・ソフト切替制御と、伸び行程中の初期をソフト側とし後期をハード側に切替える伸び行程ソフト・ハード切替制御とのいずれかを実行する。輪荷重を減少させる車輪側に設けられた減衰力可変ダンパ6,9の減衰力特性を、縮み行程中の初期をソフト側とし後期をハード側に切替える縮み行程ソフト・ハード切替制御と、伸び行程中の初期をハード側とし後期をソフト側に切替える伸び行程ハード・ソフト切替制御とのいずれかを実行する。
(もっと読む)
マップデータを使用する乗物ESCシステムのための方法及びシステム
【課題】乗物用の改良型電子安定性制御システムを提供する。
【解決手段】乗物用の電子安定性制御(ESC)システムが開示される。電子制御ユニット(ECU)は、乗物のブレーキ及びスロットルの動作に変更を加えることで、意図された乗物方向及び/又はヨーレートと、実際の乗物方向及び/又はヨーレートとの間の差を減少することにより、乗物の横滑りを減少するようにプログラムされる。ESCシステムは、車輪速度センサ、ハンドル位置センサ、ヨーレートセンサ、及び横方向加速度センサから入力を受け取る。又、ESCシステムは、乗物が位置している道路の特性を少なくとも指示する入力も受け取り、乗物が位置する道路は、マップデータベースを使用するポジショニングシステムから決定され、又、特性は、マップデータベースから決定される。
(もっと読む)
車両制御装置
【課題】車両の走行環境や運転指向をより的確に反映した挙動特性とすることによりドライバビリティを向上させる。
【解決手段】車両の走行状態に基づく指標を求め、前記指標に応じて前記車両の走行特性を変化させる車両制御装置において、前記車両を機敏に走行させる方向への前記指標の前記走行状態の変化に対する変化を、前記車両の走行の機敏さを低下させる方向への前記指標の前記走行状態の変化に対する変化よりも速くする指標設定手段を備える。
(もっと読む)
1 - 20 / 174
[ Back to top ]