
Fターム[3E080AA07]の内容
Fターム[3E080AA07]に分類される特許
1 - 20 / 88
水充填方法、水充填システム、および水充填ボトル
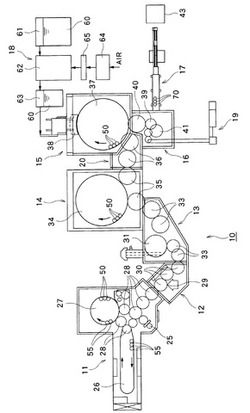
【課題】ボトル内を陽圧化する際に必要なエネルギーを低減するとともに、軽量化ボトルにおいて不足しやすいボトル強度を容易に高めることが可能な水充填方法、水充填システム、および水充填ボトルを提供する。
【解決手段】本発明は、水60をプラスチックボトル50内に充填する水充填方法である。まず空気溶解部18において水60に対して予め空気を過溶解させておく(空気溶解工程)。その後、水充填部15において、空気が過溶解された水60をプラスチックボトル50内に充填する(水充填工程)。キャップ装着部16においてプラスチックボトル50を閉栓した後、水60に過溶解された空気が気化することにより、プラスチックボトル50内部が陽圧となる。
(もっと読む)
容器把持装置

【課題】把持部に作用する容器および内容物の自重更にはキャップの巻き締め力や外力に十分に対抗して容器を適正に把持することのできる容器把持装置を提供すること。
【解決手段】容器を把持する把持位置と開放する開放位置とを開閉移動自在な一対のグリッパ3a、3bを有する容器把持装置1であって、各グリッパ3a、3bの対向面部分に、把持位置に移動した際に、容器2の外面に当接して容器を把持するとともに、容器の相対移動による変動力を受けて変位することによってセルフロック機能を付加して把持力を増大させる把持力可変把持手段11a、11bを設けたことを特徴とする。
(もっと読む)
キャッピング装置
【課題】PETボトル等の軟質素材の容器にキャップを巻き締める際に、容器が供回りすることを防止するとともに、容器の変形や内部圧力の変動を防止する。
【解決手段】スターホイール4の外周の凹部4aと、揺動可能な容器保持部材26とからなる保持手段の保持力を制御可能とし、容器2の口部がシールされていない仮締め時には、容器2に外圧を付与しない程度の弱い第1保持力で保持し、口部がシールされて以降の本締め段階では、保持部材による保持力を第1保持力よりも大きい第2保持力に切り換える。
(もっと読む)
容器およびキャップ取付方法
【課題】
本発明は、合成樹脂製の容器、およびその容器へのキャップ取付方法に関し、容器の軽量化とキャップの締付力の維持との両立を図る。
【解決手段】
合成樹脂製の容器10であって、内容物が押し出される押出口21を有しその押出口21を上に向けたときの上部に設けられた、外周を周回する雄ネジ22が形成された首部20と、押出口21を上に向けたときの首部20の下部に設けられた、内容物を収容する可撓性の容器本体30とを有し、容器本体30が、首部20に隣接した位置に、容器本体30の内面を隆起させて外面が陥没した陥没部31を有する。
(もっと読む)
液体の無菌充填方法および装置
【課題】少ないエネルギーと水で急速滅菌を可能にする充填装および方法の提供。
【解決手段】本発明は、ボトル7をH2O2で滅菌するための滅菌装置9と、ボトルを充填するための充填装置11と、および例えば密閉キャップ15のようなふたを装着するためのふた締め装置11とを備えた、ボトル内への液体の無菌充填装置に関するものであり、この場合、ボトル表面上におけるH2O2の凝縮が阻止されるようにボトル温度がそれにより設定可能な手段が設けられている。さらに、本発明は、ボトルをH2O2で滅菌するステップと、ボトルを充填並びにふた締めするステップとを有する、ボトル内への液体の無菌充填方法に関するものであり、この場合、ボトルが、滅菌において、ボトル表面上におけるH2O2の凝縮が阻止されるような温度を有している。
(もっと読む)
キャップおよびその位置決め方法
【課題】 容器に着脱するねじ部や嵌着部を有する円筒状の着脱リング部の上方に、横断面形状が真円状でない非円筒状部を備えた有底筒状のキャップであって、印刷等において高精度に位置決めすることができるキャップおよびその位置決め方法を提供する。
【解決手段】 このキャップ10では、位置決め用リブ19を内側段差部16に設けることで、対応する形状の位置決め部材の軸方向への挿入によってガイド面20により位置を微調整して位置決めすることができ、高精度に位置決めすることができる。
(もっと読む)
キャップの巻き締めにおける制御パターン選定方法およびスクリューキャッパ
【解決手段】
スクリューキャッパ1は、キャッピングヘッド7を回転させるモータ8と、このモータ8の作動を制御する制御装置11とを備えている。
特性の異なる新しいキャップ3を容器2に巻き締めようとする場合には、先ず、サンプルとしての新しいキャップ3をキャッピングヘッド7により一定の回転速度で容器2に巻き締める。このサンプリング時にキャップ3に作用するトルクはサーボアンプ23を介して制御装置11へ入力されており、制御装置11は、サンプリング時のトルクの変動を基にして、新しいキャップ3を容器3に巻き締めるためのモータ8の制御パターンと設定パラメータを決定する。
【効果】 特性の異なる新しいキャップ3を巻き締めるためのモータ8の制御パターンを容易に決定することができる。
(もっと読む)
スクリュキャップの回転補助機構
【課題】環状部1と回転補助腕2を離脱自在且つ確実に係合し、係合状態を高度に保持することができる回転補助機構Bを提供する。
【解決手段】スクリュキャップAの回転補助機構Bは、環状に構成する環状部1と、この環状部1にヒンジ状に連結される回転補助腕2とから構成する。回転補助腕2は、環状部1の外表面に、ヒンジ状に連結する連結部21を支点として、環状部1に接近、乖離自在に設けたレバー状の部材である。回転補助腕2と環状部1の一方には第一の係合部を、他方には第一の係合部に着脱可能な第二の係合部を形成し、連結部21から第一の係合部までの距離と、連結部21から第二の係合部までの距離を一致させずに寸法差乃至位置差を設ける。この寸法差乃至位置差は、連結部21乃至回転補助腕2の変形によって吸収できる範囲に設定する。
(もっと読む)
施蓋装置
【課題】 施蓋時の作業環境や、ボトル容器や中栓の製造公差に影響されることなく、中栓の分離部にオーバーキャップから余分な力が加えられることがなく、しかも、購入者の手による巻締めで中栓を簡単に開封することができるように、オーバーキャップをボトル容器に巻締めることを可能にする施蓋方法と施蓋装置を提供する。
【解決手段】
オーバーキャップ2bを開封前巻締め状態に施蓋する作業時に、巻締め量規制手段30のストッパ31を、巻締められるオーバーキャップ2bから中栓2aへ過剰な荷重が伝達されることのないオーバーキャップ2bの下限高さ位置において、前記オーバーキャップ2bの螺進経路上に進入させる。
(もっと読む)
キャップ姿勢調整機及びその使用方法
【課題】内ネジ式キャップの斜め巻き不良を解決するために、キャップの巻き締めに先立って、内ネジの開始位置を検知し、それを容器口栓オスネジ最上部のネジ開始点と一定の位置関係に整える方法を開発すること
【解決手段】内ネジ式キャップを対象にして、キャップの開口部を下向きに定置する機構と、レーザーセンサーまたはCCDカメラを使った機構を使用して、内ネジ開始点の位置を検出して、それを所望の一定位置に整える。
(もっと読む)
キャッパ
【課題】キャッピングヘッド46を昇降させずにキャップ16を受け渡すことを可能にして、キャッパ6の構成を簡素化する。
【解決手段】回転体10に設けられたネックグリッパ14によって容器2を保持して搬送するとともに、各容器2の上方にキャッピングヘッド46を配置し、シュート18から一列で供給されてきたキャップ16をキャッピングヘッド46に保持させて容器2にキャッピングを行う。シュート18の先端に連続してキャップガイド104を配置する。キャップガイド104は、キャッピングヘッド46の移動経路の下方に配置されており下流側に向かって次第に上昇する。キャップ取り出し手段58によってシュート18からキャップ16を取り出してキャップガイド104上を移動させると、キャップ16が次第に上昇して上方を水平に移動しているキャッピングヘッド46に保持される。
(もっと読む)
キャップアプリケーター
【課題】紙容器の傾斜する頂面の開口予定部に熱可塑性樹脂で成るキャップを確実に安定して固着するキャップアプリケーターの技術を提供する。
【解決手段】キャップアプリケーター4は紙容器本体2を搬送コンベヤー6で搬送する途中に、キャップ3を取付けて成る紙容器1を形成するためのキャップ供給部7を備える。搬送コンベヤー6の集積コンベヤー6aと搬送コンベヤー6cは角度αで傾斜し、易破断部Gが形成された頂面2bの傾斜面2dを水平にして紙容器2を搬送する。キャップ供給部7でキャップ3は円形のキャップ供給テーブル7cの周縁部の供給ポケット7dに移送され、紙容器本体2がキャップ取付位置11を通過するタイミングでキャップ取付手段12によって供給ポケット7dから把持したキャップ3の下面をマイクロフレーム等で溶融して垂直下方に移動し、紙容器本体2の開口予定部である易破断部Gとその頂面周縁G1に溶着する。
(もっと読む)
キャップ締付装置
【課題】 モータにより回転されるチャックによってキャップをボトルに螺着するキャップ締付装置において、チャックによるキャップの締付けに必要とされる設定トルクを制限するトルクリミッタ手段の容量を小型にすること。
【解決手段】 モータ20の回転が減速機40により減速されてチャック50に伝達され、チャック50に把持されるキャップ1がボトル2に螺着されるキャップ締付装置10であって、チャック50の回転抵抗が設定トルクより大きくなったときに、モータ20からチャック50への回転の伝達を断つトルクリミッタ手段30が、モータ20と減速機40の間に介装されてなるもの。
(もっと読む)
キャッピング装置とキャッピング方法
【解決手段】 キャッピング装置1は、キャッピングヘッド7の駆動源であるサーボモータ11の作動を制御する制御装置12を備えており、該制御装置12は、キャッピングヘッド7によってキャップ8を容器4に巻締める際の巻締めトルクのトルク波形を基にして、巻締め後におけるキャッピングの良否を判定する。すなわち、制御装置12は、巻締め終了の時点を基準として、そこから所定時間だけ遡及した判定対象時間帯txにおける巻締めトルクのトルク波形を基にして、ベレーキャップが生じたか不良品であるか否かを判定する。
【効果】 容器4とキャップ8との噛み合い開始のタイミングが個々のキャップ8でバラツキがあったとしても、巻締め終了後においてキャッピングの良否を確実に判定することができる。
(もっと読む)
容器キャップ開閉装置及び容器キャップ開閉構造
【課題】 片方の手でも容器のキャップを容易に開閉若しくは開栓させる。
【解決手段】 本発明の容器キャップ開閉装置は独立した装置であり、他装置に取り付けられて使用されるものである。容器キャップ開閉装置において、容器キャップ開閉本体部にはキャップ挿入穴部が設けられ、キャップ挿入穴部に容器のキャップ部分が挿入されたときにキャップ固定部によってキャップ部分が固定される。この状態で容器を回動させることにより、キャップが開閉若しくは開栓する。他の本発明の容器キャップ開閉構造は、他装置に組み込まれた構造である。容器キャップ開閉構造は、容器キャップ開閉装置の特徴部分と同様な構造を有する。
(もっと読む)
容器、特にボトルをねじ式で施栓するための方法および装置
【課題】容器、特にボトルをねじ式で施栓するための新規な方法および装置を提供すること。
【解決手段】本発明による方法によれば、閉鎖キャップのそれぞれをピックアップするためのピッキング段階および/または閉鎖キャップをねじ付けるためのねじ付け段階において、閉鎖ヘッドを昇降させるための直線駆動システムの電力消費量が測定されて、電力消費量の少なくとも1つの特性値と比較されることにより、間近の、または生じた不正確な閉鎖が検出されることによって、容器を低いエラー率で閉鎖することができ、また、場合により、不正確に閉鎖された容器を低いエラー率で連続する製品流れから排出することができる。
(もっと読む)
密閉機及び容器の密閉方法
予め成形された雌ねじ山(5)を備えたキャップ(7)により容器(13)を、特にボトルを密閉するための密閉機(1)であって、少なくとも一つの密閉ヘッド(3)、駆動軸(11)、駆動装置(9)、スイッチ機構(37)、センサ(19)を有し、及び少なくとも一つの制御機構(17)を有する密閉機を提案する。密閉機(1)は、少なくとも一つのセンサ(19)が、キャップ(7)を容器(13)上に設置した後の、容器(13)に対するキャップ(7)の位置を捕捉し、スイッチ機構(37)が、捕捉された位置と参照位置(R)とを比較する比較ユニット(33)を備えており、この比較に応じ、制御機構(17)により、スイッチ機構(37)を介して駆動装置(9)の回転方向が設定されることを特色とする。 (もっと読む)
スクリューキャップを巻き締めるためのキャッピングヘッド
本発明は、スクリューキャップ(31,33)を容器、特にボトルに巻き締めるためのキャッピングヘッド(1)であって、一本の中心軸(3)と、スクリューキャップ(31,33)を受け入れる一つの凹所(5)を有する一つのテーパコーンチャック部(7)を有し、テーパコーンチャック部(7)は実質的に中心軸(3)の方を指し示している複数の歯(11)を持つ歯形(9)を有し、凹所(5)が一つの開口部(19)を有し、歯形(9)の歯底円直径が第一の仮想環状面(13)上に位置し、歯形の歯先円直径が第二の仮想環状面(15)上に位置し、第一及び第二の環状面(13,15)が中心軸(3)に対して同心で配置され、第二の環状面(15)及び中心軸(3)がある一つの第一の角度αを成して交差し、テーパコーンチャック部の直径(7)が開口部(19)に向かって拡大しているキャッピングヘッドである。キャッピングヘッドにおいて、第一の環状面(13)及び第二の環状面(15)がある一つの第二の角度β>0°を成して交差する。 (もっと読む)
手動式キャッピング装置
【課題】
簡易な構成で容易にキャッピングを行うことができる手動式キャッピング装置を提供する。
【解決手段】
本発明に係る手動式キャッピング装置Aは、容器bに仮締めされたスクリューキャップcに当接してキャッピングを行う当接体31を有する昇降体3と、この昇降体3を昇降させる昇降手段4とを備え、昇降体3は、昇降手段4による該昇降体3の昇降運動の一部を、当接体31を回転させる回転運動に変換する雄ねじ部35aとチェンジナット37とを有しているものである。
(もっと読む)
搬送装置
【課題】大きさが異なる各種の被搬送物に容易に対応できる搬送装置を提供する。
【解決手段】搬送装置6は、第1被噛合部61を有する第1回転体11を備え、第1回転体11には一方側挟持体41を設ける。搬送装置6は、第2被噛合部62を有する第2回転体12を備え、第2回転体12には他方側挟持体46を設ける。搬送装置6は、第1被噛合部61と噛合する第1噛合部71および第2被噛合部62と噛合する第2噛合部72を有する歯車66を備える。両挟持体41,46間の離間距離の調整時に、第1回転体11および第2回転体12が互いに異なる方向に同じ回動角度だけ回動する。
(もっと読む)
1 - 20 / 88
[ Back to top ]