
Fターム[3F022KK18]の内容
倉庫・貯蔵装置 (25,393) | 搭載ピックアップ装置(積込み機、積降し機) (1,008) | マニピュレータ (39)
Fターム[3F022KK18]に分類される特許
1 - 20 / 39
ワークストッカ
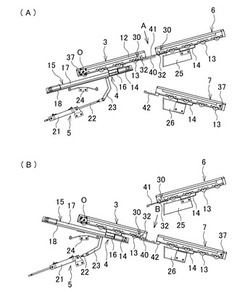
【課題】コストアップの少ない簡単且つコンパクトな構成で、而もレイアウトの変更にも対応できて汎用性に優れるワークストッカを提供する。
【解決手段】揺動コンベア3と上コンベア6との端部に、ストッパ32と、相手側のストッパ32と連係してストッパ32を移動させるフック40,41とをそれぞれ設ける一方、下コンベア7の端部に、揺動コンベア3のストッパ32と連係して当該ストッパ32を移動させるフック42を設けて、揺動コンベア3のスライド及び揺動に伴い、揺動コンベア3と上コンベア6との間で互いのフック40,41によって互いのストッパ32を倒伏姿勢に移動させて上コンベア6上のバケットを揺動コンベア3上に搬入可能とし、揺動コンベア3と下コンベア7との間でフック42によって揺動コンベア3のストッパ32を倒伏姿勢に移動させて揺動コンベア3上のバケットを下コンベア6上に搬出可能とした。
(もっと読む)
処理装置及び対象物保管装置

【課題】保管装置内の対象物に処理を施す際の対象物の遠隔搬送を省略でき、しかも対象物の受け渡しに関する時間を短縮し、操作や機構を単純化できる処理装置及び対象物保管装置を提供する。
【解決手段】処理を施す物質を収容した培養容器を収納する搬送用コンテナ1と、ロボットアーム4が設けられた処理手段144を有する処理装置15と、ステージ2と、ストッカを有する培養容器保管装置13とから構成され、搬送用コンテナ1をステージ2と培養容器保管装置13との間をロボットアーム4で移動させるとき、ステージ2と処理装置15とに配置されたガイド部材10に保持された、振動を減衰しつつ搬送用コンテナ1を移動可能に支持する支持機構3(車輪及び車軸)の上で行う。
(もっと読む)
移載装置
【課題】アームの先端部を水平に保ちながら物品を移載できるようにすると共に、物品をより正確な位置に荷下ろしできるようにする。
【解決手段】昇降台6にスカラアーム18を設け、アーム19、20の先端部の傾斜を検出するためのセンサ28と、アーム上の物品の位置を測定するためのセンサ30とを設ける。検出した傾斜を打ち消すように基台をチルトさせると共に、測定したアーム上の物品の位置に応じてアームの伸張量を補正する。
(もっと読む)
自律移動装置による荷物の受け渡し方法
【課題】自律移動装置による荷物の受け渡し方法において、簡単な構成により、作業台を床面等に常時固定していなくても荷物の受け渡しを確実に実現可能とする。
【解決手段】自律移動装置1は、作業台2の位置を認識して所定位置まで接近した状態で作業台2に力を及ぼすことにより作業台2を動かないように固定し、その後に作業台2との間で荷物3の受け渡しまたは受け取りを行なう。作業台2として既存の机などを用いることができる。台固定機構4は、人の腕に類似の2関節アーム機構であり、不図示の駆動機構から第2アーム42に伝達される動力によって作業台2の荷物載置面21を下方に押さえつける。これにより、作業台2と自律移動装置1との相対位置が固定される。作業台2をアンカー等によって床面等に常時固定していなくても荷物3の受け渡しを確実に実現でき、作業台2の配置変更を容易に実施できる。
(もっと読む)
搬送システム
【課題】工場内のコンベアや搬送台車等の搬送手段が故障したとしても、製造プロセスの停止を招くことなく、製造効率の低下を抑制することができる搬送システムを提供する。
【解決手段】搬送システム100は、基板と基板間用紙とが順次積層された積層体W0を搬入する積層体搬送装置101と、積層体搬送装置101によって搬入され、所定位置に載置された積層体W0から基板間用紙を取り出す紙取出装置103と、積層体搬送装置101によって搬入され、所定位置に載置された積層体W0から基板を取り出す基板取出装置102と、基板取出装置102によって取り出された基板が載置されると共に、載置された基板を搬送する基板搬送装置104と、板取出装置102によって取り出された基板が載置されると共に、載置される基板を作業者が搬送する基板仮置き台105とを備え、基板搬送装置104は、基板搬送装置104と基板仮置き台105とに基板を選択的に載置可能とされる。
(もっと読む)
仕分装置
【課題】効率良く仕分作業ができる仕分装置を提供する。
【解決手段】仕分装置1は、収納容器A内から物品Wを取り出す取出手段11と、この取出手段11で取り出した物品Wを搬送する第1物品搬送手段12とを備える。仕分装置1は、物品Wを搬送する第2物品搬送手段41と、オーダ情報に基づく数の物品Wを第1物品搬送手段12上から第2物品搬送手段41上に押し出して載せ換える押出手段46とを備える。第2物品搬送手段41上の物品Wを保持手段51のロボットハンド部で保持して出荷容器B内に投入する。
(もっと読む)
物品搬送装置
【課題】塵埃の発生を防止できしかも作業者用移載箇所で作業者が怪我をし難い物品搬送装置を提供すること。
【解決手段】作業者用移載箇所Pと非作業者用移載箇所Qとに亘る移動経路を往復移動自在な往復移動体と、移動経路の全長に亘って移動する往復移動体の上方を覆うカバー体22と、往復移動体から上方側に延びてカバー体に形成されたスリット24を上下方向に貫通する状態で設けられた連結部にて往復移動体と連結されて、カバー体よりも上方側で移動経路方向に移動する物品載置体20とが設けられ、スリットは、往復移動体が移動経路に沿って移動するときに連結部がカバー体に対して非接触状態に維持されるように形成され、カバー体のうちスリットの作業者用移載箇所側の端部を形成する端部形成部分22Eに、弾性変形自在で柔軟性のある弾性カバー部22Sを備えて構成されている。
(もっと読む)
ロボット式貯蔵装置
【課題】複数のサンプルチューブを保持するマイクロプレートを貯蔵するためのロボット式貯蔵装置の提供。
【解決手段】ロボット式貯蔵装置は、複数の冷凍ユニット100を持った冷凍室10を有し、前記冷凍ユニット100からマイクロプレートを取り出すことおよび前記冷凍ユニット100にマイクロプレートを入れることができる第1のロボット16を有する。当該ロボット式貯蔵装置は、少なくとも1つの処理室11、13、および処理室11、13を冷凍室10から熱的に分離するための手段15を有する。各処理室11、13は、少なくとも1つのチューブ移送モジュール115を有する処理ステーション111を有し、かつマイクロプレート受容器103および前記少なくとも1つのチューブ移送モジュール115の間でマイクロプレートを動かすための第2のロボット112を有する。
(もっと読む)
物品移載用ロボット装置
【課題】 簡易な方法で物品に打痕などを生じさせず、均一かつ効率的な積付けを可能とする物品移載用ロボット装置を提供する。
【解決手段】物品受渡ステーション3において、物品供給手段4から受取った物品Wを、所定の積込み容器に積付ける物品移載用ロボット装置2であって、ロボットベース部20と、ロボットベース部20に回動自在に連結された多関節ロボットアーム部21と、ロボットアーム部21の先端に回動自在に連結されたロボットハンド部23とを含み、ロボットハンド部23は、バケット保持部8と、物品を収容するためのバケット部9からなり、バケット部9は、バケット保持部8に対して傾動可能に保持され、かつ角度調整駆動部12によって傾き角度の調整が可能とされる。
(もっと読む)
ピッキングロボットおよびピッキングシステム
【課題】ピックアップした物品に取り付けられたICタグを確実に読み取ることが可能なピッキングロボットおよびピッキングシステムを提供する。
【解決手段】ピッキングロボット10は、ICタグが取り付けられたワークWをピッキングする。ピッキングロボット10は、IDリーダ15と、ハンド12とを備えている。IDリーダ15は、ループ状にアンテナ15aが形成されており、RFIDタグTの情報を取得する。ハンド12は、アンテナ15aの内側に配置され、ワークWを吸着してピッキングする。
(もっと読む)
搬送物仕分け装置および方法
【課題】搬送用カセットに収納される複数種別の基板を、効率良く、その種別ごとに収納用カセットに仕分ける搬送装置を提供する。
【解決手段】搬送用収納部に収納された、複数の被搬送物を、当該被搬送物の種別に応じた格納用収納部に収納する搬送物仕分け装置であって、搬送用収納部を積載する載置台を有する搬送台車と、搬送用収納部に収納される複数の被搬送物のそれぞれの種別を示す情報である搬送配列情報を記憶する記憶手段と、搬送配列情報に基づいて、搬送台車を搬送配列情報に対応する格納用収納部の近傍に移動させる搬送台車移動手段と、搬送台車が積載する搬送用格納部から、搬送台車移動手段により移動させられた位置近傍の格納用収納部に収納される種別の被搬送物を取り出し、当該格納用収納部に移載させる被搬送物移載手段と、を備えることを特徴とする搬送物仕分け装置。
(もっと読む)
部品取り出し方法
【課題】部品棚内の複数の収納室に収納された部品を同時に取り出す際に、収納室の内部/外部へのハンドの差し込み/抜き出しを繰り返し行う手間を解消する。
【解決手段】並列に配置された複数の収納室11を含む部品棚1から複数の部品bを取り出すための方法は、ハンド3を一の収納室11に差し込むステップ1)と、ハンド11により一の収納室11内の部品bを把持するステップ2)と、部品を把持した状態のハンド3を収納室11から抜き出すことなく移動通路12を通して他の収納室11へと移動させるステップ3)と、ハンド3により他の収納室11内の部品bをさらに把持するステップ4)と、部品をさらに把持した状態のハンド3を他の収納室11から抜き出すステップ5)と、を有する。
(もっと読む)
移載装置
【構成】 移載装置のスカラアームに、水平な出力軸を備えた駆動モータと、出力軸に接続された水平なネジ棒と、ネジ棒と噛み合うことにより水平方向に進退しかつラックを備えたラック部材と、ラックと噛み合うことにより回転するピニオンと、ピニオンの回転をアームの運動に変換する変換機構とを設ける。
【効果】 ハーモニックドライブを用いずに、ネジ棒とラック部材とピニオンとを用いて、スカラアームを駆動でき、ネジ棒とラック部材の組み合わせで減速機を構成し、駆動モータは水平に配置できる。これらのためスカラアームの駆動部をコンパクトにできる。
(もっと読む)
スタッカー
【課題】マイクロプレートとその中のサンプルの効率的で経済的なハンドリングを可能にする装置および方法を提供する。
【解決手段】複数のマイクロプレートを貯蔵するためのスタッカー(1)であって、該マイクロプレートは、各々、上面側と、該上面側とは反対側にある底面側とを有しており、当該スタッカーは、ハウジングを有し、かつ、そのハウジングから複数のマイクロプレートのうちの1つのマイクロプレートを取り出すための取り出しゲート(13)を有する。該複数のマイクロプレートのうちの1つのマイクロプレートの上面側が、該複数のマイクロプレートの隣りのマイクロプレートの底面側(212)に接するようにして、かつ、ハウジングが該複数のマイクロプレートに隣接するようにして、当該スタッカー(1)が、ハウジング内に複数のマイクロプレートを収容するように構成されている。
(もっと読む)
板材搬送収納システムおよび板材搬送収納方法
【課題】 板材を効率良く搬送して収納することができ、その収納状態で板材の成形部分が潰れたりすることがない板材搬送収納システムを提供する。
【解決手段】 板材ストッカ4と、板材搬送装置とを備える。板材ストッカ4は、ストッカフレーム30内のトレイ収納部32に収納された内側位置Aとトレイ収納部32から引き出された外側位置Bとに位置切換自在な複数段のトレイ34を有する。板材搬送装置は、板材W2を保持可能な板材保持手段20と、この板材保持手段20を前記トレイの引き出し方向である位置切換方向と平行に移動させる機能を有する移動手段とを有する。この移動手段により板材保持手段20を前記位置切換方向と平行に移動させることで、外側位置Bにある複数段のトレイ34のうち最上段のトレイ34を内側位置Aに位置切換させ、かつその1段下のトレイ34の上方に板材保持手段20を位置させる。
(もっと読む)
物品処理設備
【課題】物品収納棚の構成を簡素なものとして、全体構成の簡素化を図ることができる物品処理設備を提供する。
【解決手段】物品収納棚の物品搬出入用の物品載置体50を、その物品収納棚1の外方に突出する物品授受用の突出位置と物品収納棚の内部に引退する引退位置とに出退自在に設け、物品搬送体3を、物品収納棚に対する物品移載箇所に停止した状態において、突出位置の物品載置体50に対して物品の受け渡し及び受け取りを行うように構成し、その物品搬送体3に、物品移載箇所に停止した状態において、物品載置体50を突出位置と引退位置とに出退操作する出退操作手段S1を設ける。
(もっと読む)
ワーク取り出し装置
【課題】パレット奥の横桟とワーク押さえ手段が接触したときにワーク押さえ手段を接触方向とは反対方向に退避させて干渉を無くすワーク取り出し装置を提供する。
【解決手段】縦置きパレットに縦置きに複数配置されたガラス3をパレット手前から奥側に向かって順次取り出すワーク取り出し装置7であって、前記ガラス3の上端縁を押圧し該ガラス3をパレット底部に押し付けてガラス3のパレット奥行き方向への倒れ込みを防止するガラス押さえ手段61を有し、このガラス押さえ手段61が横桟と接触したときに、接触方向とは反対方向にガラス押さえ手段61を退避させる干渉回避手段70を備える。干渉回避手段70は、横桟に接触する接触部材71と、ガラス押さえ手段61を摺動自在とするスライドレール72及びスライダー73と、ガラス押さえ手段61を一方に押し付ける弾性部材74と、からなる。
(もっと読む)
三次元自動化選択モジュール
個々の商品または複数の商品がコンベヤの垂直スタック(またはラック)に保管される。コンベヤのスタックは、カートン、荷物及び/またはパレットが積載される垂直輸送機の両側に配置される。垂直輸送機は、エレベーターのような形式で上げられることが出来、コンベヤ上の荷物は、保管ラックコンベヤのさまざまなレベルから商品を受けることができる。積載プロセスの速度を上げるために、商品はコンテナの両側から同時に及び/または順次に積載されることができる。ある形態では、クロスベルトコンベヤが商品を積載するのに使用される。代替的叉は付加的にロボットアームが商品を積載するのに使用される。一つ以上のコンベヤドライバーが、商品をコンベヤの積載位置に牽引するために多数のコンベヤを駆動するのに使用される。 (もっと読む)
棚装置
【課題】棚板に載置された物品に取り付けられたRFIDタグから物品情報を読み取る読取装置に不具合を生じさせないようにした棚装置を提供すること。
【解決手段】上下方向に複数の係合孔13を並べて穿設した左右の支柱2と、後端縁に設けられた係合爪12を前記支柱2の係合孔13に係合することで前記両支柱2に取り付けられる金属製のブラケット6と、物品情報が記憶されたRFIDタグ8が取り付けられた物品7を載置して前記両ブラケット6により左右端部が支持される棚板5と、を備える棚装置1において、前記ブラケット6を、前記棚板5の左右端部の上面側における前方以外の部位に設ける。
(もっと読む)
自動倉庫
【構成】 自動倉庫2に一対の回転棚6,7を設け、その間にマスト14と一対の昇降台16,16及び一対のスカラアーム18,19を配置する。スカラアーム18は複数のアームを下から上へ積み上げてハンド20が高い位置を取るように、スカラアーム19は複数のアームを上から下へ配置してハンド20が低い位置を取るようにする。
【効果】 自動倉庫の全高に渡って物品を収納できるので、収納効率が向上する。
(もっと読む)
1 - 20 / 39
[ Back to top ]