
Fターム[3F033BB19]の内容
ローラコンベア搬送用ローラ (2,155) | ローラの配置 (419) | 検知装置があるもの (16)
Fターム[3F033BB19]に分類される特許
1 - 16 / 16
ローラコンベヤ、及びその滑り検出方法
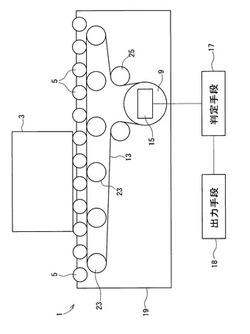
【課題】駆動ベルトの交換時期を適切に判定できるローラコンベヤ、及びその滑り検出方法を提供する。
【解決手段】ローラコンベヤ1は、荷物3を受け止める複数のローラ5と、駆動源7により回転する駆動プーリー9と、前記駆動プーリー9に巻掛した駆動ベルト13と、駆動プーリー9の回転する加速度を検知する加速度検知手段15と、加速度検知手段15の検知した加速度の大きさを判定する判定手段17とを備える。判定手段17は、所定期間に加速度検知手段15により加速度の検知された回数に基づき警告を出力するコンピュータである。加速度検知手段15は、駆動プーリー9に取付けた加速度センサである。
(もっと読む)
遠心力作動式磁気ブレーキ付コンベアローラ
搬送装置

【課題】カセットの搬送過程においても、カセットの姿勢を正常な状態に維持することができる搬送装置を提供する。
【解決手段】搬送装置は、第1搬送台110および第2搬送台111と、カセット200の第1側面との間の距離を検知可能なセンサと、センサからの出力に基づいて第1ローラと第2ローラの回転速度を調整する制御部260とを備える。
(もっと読む)
ローラコンベア
【課題】制動手段が誤った位置のまま作業をしてしまうことを防止することができるローラコンベアを提供する。
【解決手段】ローラコンベアは、貨物の搬送方向(図中の前後方向)に沿って配設されるローラトレイ9と、このローラトレイ9に回転自在に軸支され、前後方向に並んで配置される複数のローラ10と、制動部材20と、位置検出センサ30とを備える。制動部材20は、ローラ10の形成する搬送面より上方に突出する阻止位置、及び、前記搬送面より下方となる退避位置に切り替え可能に構成されている。位置検出センサ30は、制動部材20が阻止位置又は退避位置の何れの位置にあるかを検出する。
(もっと読む)
ローラコンベヤ
【課題】衝撃等に敏感な精密部品であっても衝撃等を与えず安全に搬送可能なローラコンベヤを提供する。
【解決手段】複数のローラ12と、ローラ12ごとに設けられ、各ローラ12をそれぞれ回転駆動させる複数のモータ14と、各モータ14の動作をそれぞれ制御可能な制御手段30とを具備する。
(もっと読む)
コンベヤ
【課題】荷役対象物の有無を正確に判断することが可能なコンベアを提供する。
【解決手段】無人搬送車両200は、コンベア100の近傍まで荷役対象物Wを搬送し、当該荷役対象物Wをコンベア1の複数のローラー2上に載置する。このとき、自動荷役車両200のストラドルレッグ212は、ストッパ駆動手段3のレバー4に接触する。それにより、当該レバー4が移動(回動)することによって、ストッパ駆動手段3の連結部5を介してストッパ6が、ローラー2の上方まで起き上がる。これにより、自動荷役車両200により載置された荷役対象物Wは、自重により複数のローラー2上を移動することなく、ストッパ6により停止される。したがって、センサにより荷役対象物Wの有無を所定時間内に検出することが可能となる。
(もっと読む)
被搬送物の水平搬送方法および水平搬送装置
【課題】下面が平坦面でなく凹凸がある被搬送物を、滞留させることなく確実に水平搬送することのできる被搬送物の水平搬送方法および水平搬送装置を提供する。
【解決手段】下面12aに少なくとも1つの凸部を形成しかつ剛性のある被搬送物12の前記下面12aを接触支持して摩擦力により被搬送物12を水平搬送する搬送表面10を持った回転駆動軸5を多数平行に配置する。水平搬送途中で被搬送物12の下面の凸部がその前方の回転駆動軸5の搬送表面10の回転上昇面10aに接して、それら凸部と搬送表面10の回転上昇面10aとの間ですべり接触を生じて被搬送物12の水平搬送が滞留したときに、回転する回転駆動軸5の搬送表面10の周方向に設けた切欠部11の係合作用により、同回転駆動軸5の回転途中で、被搬送物12の下面の凸部13Bを押し上げて前記すべり接触に係わる回転駆動軸5を乗り越えせしめ、被搬送物の水平搬送を再開せしめる。
(もっと読む)
ローラコンベアポート及び搬送材の位置決め方法
【課題】 搬送材をローラコンベアポートの停止位置に精度良く停止できるローラコンベアポート及び搬送材の位置決め方法を提供する。
【解決手段】 搬送方向Cに向けて延びる駆動ローラモジュール21と、駆動ローラモジュール21の制御装置22と、搬送材55の位置を検出する位置検出手段41、42とからなるローラコンベアポート20であって、少なくとも一対の位置検出手段41、42が搬送方向Cに縦列に配置され、一方の位置検出手段41が検出状態となり、他方の位置検出手段42が非検出状態となったことを以って、搬送材55が停止位置40まで搬送されたと判断することを特徴とする。
(もっと読む)
ローラコンベアレール及びローラコンベアレールにおけるキャリア搬送方法
【課題】 異なる高さ及び/又は異なる傾斜角度で敷設される2以上のローラコンベアレールを繋ぐ接続用ローラコンベアレールにおいて確実にキャリアを搬送する。
【解決手段】 ローラモジュール11bを水平位置に保持してキャリア5をコンベア12から搬送する。検出センサでキャリア5の進入完了を検出すると、ローラモジュール11bの駆動ローラを停止させてボールネジにより回転動作を作動させて傾斜状態まで回転させる。駆動ローラを駆動させ、傾斜状態で保持されるローラモジュール11aまでキャリア5を搬送させる。検出センサでキャリア5の進入完了を検出すると、ローラモジュール11aの駆動ローラを停止させてボールネジにより回転動作を作動させて水平状態まで回転させる。駆動ローラを駆動させ、コンベア10までキャリア5を搬送させる。
(もっと読む)
操縦可能且つ後退可能な貨物用動力駆動ユニット
コンテナが貨物輸送手段内で横方向および縦方向の両方に動かされる必要がある戸口など、コンテナを互いに垂直方向に移動させるため輸送手段に取り付けられる操縦可能且つ後退可能な動力駆動ユニット(SRPDU)を提供する。SRPDUは外部からの命令を受けると回転し、駆動ユニットを要求された方向に合わせ、貨物コンテナを駆動する。SRPDUは、輸送手段の構造体に固定して取り付けられた固定支持部(1010)と、固定支持部に回転可能に取り付けられた回転支持部(1020)とを備えている。回転支持部には、駆動アッセンブリが移動可能に取り付けられている。駆動アッセンブリは、ローラ(120)と、ローラを回転させる第1の電子制御モータとを備えている。駆動アッセンブリに取り付けられたリフトアッセンブリ(150)は、ほぼ回転支持部の内側にある後退位置からローラが貨物と当接して駆動させる突出位置まで回転支持部に対して駆動アッセンブリを移動させる第2の電子制御電気モータを有している。回転駆動アッセンブリは、回転支持部に固定支持部に対して回転支持部を回転させる第3の電子制御電気モータ(1030)を有している。電子制御器(1060)が第1のモータと第2のモータと第3のモータとを制御する。  (もっと読む)
(もっと読む)
ローラコンベヤの制動装置
【課題】 簡単な構成で確実にローラコンベヤを停止することができる制御装置の提供。
【解決手段】 モータ9を備えた少なくとも1つのモータローラを含むローラコンベヤのモータ9が物品を搬送方向に搬送するように回転している状態において、制御機器14がモータ9の駆動を停止する。モータ9の駆動停止後に、モータ9が搬送方向に回転しているか回転方向検出部22が判定する。モータ9が搬送方向に回転していると判定されたとき、搬送方向と反対方向に逆回転制御部26がモータ9を所定回転数だけまたは所定時間だけ回転させる。制動後に、モータ9が搬送方向に回転しているか否か判断し、搬送方向に回転しているとき、搬送方向への回転が中止されるまで、逆回転制御部26が繰り返し制動する。
(もっと読む)
コンベアユニットおよびゾーン制御式コンベアシステム
【課題】 センサを用いることなく、モータの有する発電機能を利用して被搬送物の搬入を検知し、しかも設計の容易なコンベアユニットを提供する。また、そのコンベアユニットを用いたゾーン制御式コンベアシステムを提供する。
【解決手段】 駆動ローラ5と、駆動ローラ5の駆動制御を行うコントローラ10を有するコンベアユニット2であって、駆動ローラ5は永久磁石と電機子コイル32a〜32cを内蔵したモータ30を駆動源とし、コントローラ10は電機子コイルの短絡、開放を繰り返す断続手段15と、電機子コイル32a〜32cで誘起される起電力に基づいて外力によるモータ回転を検知する回転検知手段17とを備える。モータ30の非駆動時に断続手段15による動作を継続しつつ待機し、回転検知手段17でモータ30の回転が検知されると、被搬送物が搬入されたと判別して在荷信号を出力するコンベアユニット2。
(もっと読む)
搬送装置
【課題】 簡単な構造で、搬送されてくる物品を一時的に停止させるようにした搬送装置を提供することを課題とする。
【解決手段】 中空部6を備えた円筒状を呈するとともに、円筒状の外周面に中空部6に挿通する吸着孔7をらせん状に形成した吸引ローラ部材3と、この吸引ローラ部材3の外周面の一部を覆うカバー部材11と、一端が、着脱自在な接続部材12を介して6中空部に挿通するとともに、他端が吸引手段に接続されたホース部材5と、を備え、ローラ部材の一部を吸引ローラ部材3で形成するとともに、吸引ローラ部材3上に被搬送物が搬送されてきたときに同期をとって吸引手段を作動し、吸引孔にて被搬送物を吸引・保持させる。
(もっと読む)
ローラハース炉
【課題】焼成用のローラハース炉において、被焼成物を搭載した搭載部材が炉内で蛇行など不規則な動きをすることなく、安定して搬送できるローラハース炉を提供する。
【解決手段】ローラハース炉は、複数のローラ20をそれぞれ回転させながら、搭載部材30に搭載したセラミック部材を所定の搬送方向に搬送して焼成するものであって、複数のローラそれぞれに駆動力を伝達して回転させる駆動装置40、40aと、当該駆動装置が複数のローラそれぞれを回転させる速度を制御する制御部50を備え、制御部は間欠的に、複数のローラに含まれる副駆動ローラ21の回転速度が、当該副駆動ローラよりも搬送方向上流側に配置されているローラの回転速度よりも相対的に低くなるように駆動装置を制御する。
(もっと読む)
ローラコンベヤ設備
【課題】機能ごとに配管ポートを分離して、複数の配管を整然とすっきりとして見栄えよく配設でき、化粧板を不要にできて、全体のコストダウンを図ることができるローラコンベヤ設備を提供する。
【解決手段】各ゾーンZ1〜Znに、ローラ6群に対してコンベヤ駆動手段10を接断させるアキュームユニット30と、ローラ群に対して当接離間作用するブレーキユニット40と、開閉弁68を備えた在荷検出手段50を設け、各開閉弁の入口側ポートを作動流体Aの主供給配管150側に接続した。最下流のゾーンZ1に電磁切り換え弁149を設け、最下流のゾーンを除く各ゾーンそれぞれに両ユニットを可逆的に作用させる弁ユニット70を設けた。弁ユニットを、主供給配管に接続する受け入れ体71と、受け入れ体からの作動流体を両ユニット側に可逆的に供給する切り換え弁体81と、切り換え弁体からの作動流体を両ユニット側に振り分け供給する継手体101と、同じゾーンにおける開閉弁の開動により作動流体を切り換え弁体へ供給可能な振り分け弁体111により構成した。
(もっと読む)
平面基板搬送方法およびその装置
【課題】搬送ローラーのローラー取り付け位置や、搬送ローラーに取り付けたローラーの径を、工程毎に異ならせることにより、基板についた傷の位置から工程を特定して、傷の原因を容易に除去可能にする平面基板搬送方法及び装置を提供する。
【解決手段】フラット表示パネル用の平面基板4を搬送ローラー1で搬送するに際し、平面基板4の搬送経路を複数の仮想ブロックに分割し、分割した仮想ブロックの搬送経路毎に異なる位置および/または異なる径Dのローラー3を取付けた搬送ローラー1を配置するとともに、同一仮想ブロック内の搬送経路には同じ位置に同じ径Dのローラー3を取付けた搬送ローラー1を配置し、平面基板搬送後に基板4の搬送ローラー接触面の傷Fを検査し、傷Fの位置または傷Fの間隔π×Dから傷Fの原因となった搬送ローラー1が配置された仮想ブロックの搬送経路を特定する。
(もっと読む)
1 - 16 / 16
[ Back to top ]