
Fターム[3F064EA03]の内容
ウェブロールの交換 (2,790) | ウェブロールの移送、台車 (166) | ウェブロール搬送台車 (96)
Fターム[3F064EA03]の下位に属するFターム
昇降機構を持つもの (44)
排出機構を持つもの (3)
転倒防止機構を持つもの (3)
スナッバロールを持つもの
特殊な載置面の構造 (16)
Fターム[3F064EA03]に分類される特許
1 - 20 / 30
ログの紙端固定装置
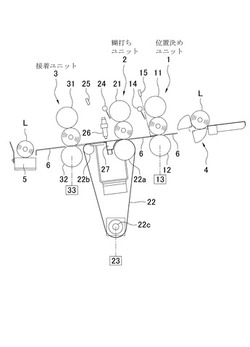
【課題】生産性が高く、ウエブの接着不良が生じにくいログの紙端固定装置を提供する。
【解決手段】ログLを回転させながら紙端を開き、紙端を目標位置まで回転させておいて、けり出しを行う位置決めユニット1と、位置決めユニット1がけり出したログLを受け入れ、回転させながら紙端を開いて繰り出し、その紙端の裏面に糊打ちして、けり出しを行う糊打ちユニット2と、糊打ちユニット2がけり出したログを受入れ、回転させて紙端をログ本体に接着させる接着ユニット3とからなる。位置決めユニット1により紙端を目標位置まで回転させておいてログをけり出すと、そのログを受入れた糊打ちユニット2では改めて紙端を糊打ちに適した位置にもたらすための位置決め動作を要せず糊打ちができる。また、接着ユニット3により紙端の接着が行える。このように、糊打ちユニット2では位置決め動作は必要としないので、製造時間が短くなり、生産性が向上する。
(もっと読む)
ロール体搬送装置

【課題】ロール体の受け取りをよりスムーズに行う。
【解決手段】ロール体搬送用無人搬送車100は、ターレットによって空中に支持されているロール体の胴部に鉛直方向下側から接触する載置台102と、載置台102にかかる荷重を検出する荷重検出部と、荷重検出部によって検出される荷重に基づいて、載置台102がロール体を押す力を調整する荷重調整部と、を備える。荷重調整部は、荷重検出部によって検出される荷重がロール体の重量に近づくように、載置台102がロール体を押す力を調整する。
(もっと読む)
ロール体搬送装置
【課題】ロール体の受け渡しの際の位置決めをより好適に行う。
【解決手段】ロール体搬送用無人搬送車100は、ロール体の胴部が載置されるべき載置台102と、生産機に対する載置台102の位置を検出する検出手段と、ロール体搬送用無人搬送車100の本体168がロール体の受け渡しのために停止しているとき、検出手段による検出結果に基づいて、載置台102を非鉛直方向に動かす移動手段と、ロール体搬送用無人搬送車100の本体168がロール体の受け渡しのために停止しているとき、検出手段による検出結果に基づいて、載置台102を回転させる回転手段と、を備える。
(もっと読む)
ロール体搬送装置
【課題】ロール体の受け渡しの際の位置決めをより好適に行う。
【解決手段】ロール体搬送用無人搬送車100は、ロール体の胴部が載置されるべき載置台102と、生産機に対する載置台102の位置を検出する検出手段と、ロール体搬送用無人搬送車100の本体168がロール体の受け渡しのために停止しているとき、検出手段による検出結果に基づいて、載置台102を非鉛直方向に動かす移動手段と、ロール体搬送用無人搬送車100の本体168がロール体の受け渡しのために停止しているとき、検出手段による検出結果に基づいて、載置台102を回転させる回転手段と、を備える。
(もっと読む)
ロール原紙供給装置及び方法
【課題】紙継必要時間をより短縮させることができるようにする。
【解決手段】平面視で紙の供給方向に直列に配置された少なくとも上流位置P2,中間位置P3a,下流位置P4の3つの位置と、上流位置P2の側方に配置され準備段階のロール原紙を配置する準備位置P1と、下流位置P4の側方に配置され排出段階のロール原紙を配置するリリース位置P5と、をそなえると共に、準備位置P1から上流位置P2,中間位置P3a,下流位置P4を順に経てリリース位置P5に移動可能であってロール原紙を支持する少なくとも3台の移動式ミルロールスタンドと、紙の供給方向に沿って設けられた紙継装置と、をそなえる。
(もっと読む)
ロール体用搬送車
【課題】挿入部のロール体への干渉を検出できるロール体用搬送車を安価に提供する。
【解決手段】ロール体用搬送車の台車本体に、ロール体の軸部の両端部を載置支持する一対の支持体と、一対の支持体を移動操作する移動操作手段と、設定停止位置に台車本体が停止した状態で、ロール体保持装置の挿入部及びロール体の軸部を撮像する撮像手段と、撮像手段の撮像情報に基づいて移動操作手段の作動を制御する制御手段とを設け、制御手段が、ロール体保持装置が一対の挿入部を小径化させた後、ロール体保持装置が一対の挿入部の夫々を互いに離間移動させる前において、撮像手段の撮像情報に基づいて軸部が抜出許容範囲から外れていると判別した場合は、軸部を抜出許容範囲内に移動させるべく移動操作手段の作動を制御する位置修正処理を実行する。
(もっと読む)
ロール体用自動搬送車
【課題】走行するときにロール体がその軸心方向に移動することやたけのこ状になることを防止できるロール体用自動搬送車を提供する。
【解決手段】ロール体を載置支持する支持手段8における一対の支持体13の夫々を、コアaをその軸心方向に沿って移動自在に載置支持し且つ支持手段8にて支持したロール体のシート材bの側面に沿う接触面を備えて構成し、支持手段8を、ロール体を支持した状態で駆動手段にて一対の支持体13を互いに遠近移動操作することにより、シート材bの側面と一対の支持体13の接触面とが離間する離間状態と、シート材bの側面と一対の支持体13の接触面とが接触する接触状態とに切り換えられるように構成する。
(もっと読む)
位置判別装置及びそれが装備された移動体
【課題】被検出物の位置を的確に判別することができる位置判別装置を提供する。
【解決手段】一対の撮像手段11を、それらの光軸が互いに交差し、且つ、光軸の交点oに対して上下方向の下方側に位置し、且つ、光軸の交点oに対して車体前後方向の両側に位置する状態で分散配置して、判別手段を、光軸の交点oの上下方向の下方側及び上方側における光軸の交点oから設定距離未満である範囲を非検出範囲とし、光軸の交点oの上下方向の下方側における光軸の交点oから設定距離以上離れた範囲を検出範囲として、一対の撮像手段11にて撮像された一対の画像における被検出物6の撮像位置の差に基づいて検出範囲における基準位置に対する被検出物6の上下方向での位置を判別するように構成する。
(もっと読む)
無人搬送車
【課題】無人搬送車において、位置決め部材を用いることなく保持アームを荷物を支持すべき位置に位置決めできるようにし、無人搬送車自体は通常の停止精度でありながら、固定側ステーションに対してロール状の荷物を確実に受け渡しできるようにする。
【解決手段】無人搬送車1は、ロール状の荷物3の両側を支持する一対の保持アーム51と、各保持アーム51を前後及び左右方向に移動させる駆動機構53と、固定側ステーション2を基準に該ステーション2と本車1との相対位置を検出する位置検出センサ6と、駆動機構53を制御する制御ユニット8とを備える。制御ユニット8は、本車1が固定側ステーション2の荷物受け渡し位置まで移動したとき、位置検出センサ6による位置情報に基づき保持アーム51における荷物を支持すべき位置に対する前後及び左右方向のずれ量を算出し、このずれ量に応じ駆動機構53を動作させ各保持アーム51の位置ずれを補正する。
(もっと読む)
食品の密封パッケージを生産するためのパッケージングユニットの保管ステーションから供給ステーションへの包装材料のリールの移動方法、及び、そのようなリールをクランプするためのクランプユニット
パッケージングユニット(5)の保管ステーション(3)から供給ステーション(4)への包装材料のリール(2)の移動方法において、クランプユニット(1)の一対のクランプエレメント(10)を用いて、リール(2)の外周縁部(6)をクランプする工程と、クランプエレメント(10)を、リール(2)に対して回転させる工程と、周縁部(6)に対して径方向内側のリール(2)の部分(7)と相互作用することによって、一対のクランプエレメント(10)にリール(2)を支持する工程とを含む方法を説明する。 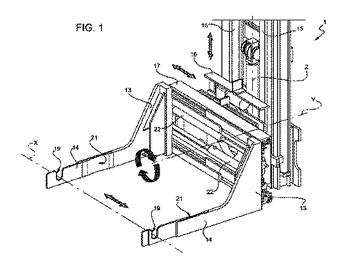 (もっと読む)
(もっと読む)
給紙無人搬送車システム
【課題】無人搬送車に搭載される載荷用テーブルに必要とされるスライドストロークを短縮し、無人搬送車のコンパクト化を実現する給紙無人搬送車システムを提供する。
【解決手段】輪転機と輪転機に対して新聞巻取紙を装着・回収する無人搬送車とを有する給紙無人搬送車システムにおいて、輪転機の給紙エリアに無人搬送車を誘導する誘導ラインが、一つの輪転機に対して複数設けられていることにより上記の課題を解決する。
(もっと読む)
コイル搬送方法およびコイル搬送装置
【課題】特に焼鈍後のコイル変形の問題を有利に解決するためのコイルの搬送方法を提供する。
【解決手段】コイル状に巻取られた金属帯のコイルを熱処理した後、搬送装置を介して該コイルを次工程ラインの入側まで搬送するに当たり、該搬送装置上で前記コイルを当該コイルの中心軸回りに回転させながら搬送するコイルの搬送方法及び装置。前記コイルの回転速度を1回/分以上とし、該コイルの回転は、次工程ラインの入側に配置されたペイオフリールに対するコイル装着完了の30秒以上前に開始する。前記コイルの回転用ロール4,5を2本以上備え、該回転用ロールはコイル外周部と接触してコイルを回転させ、少なくとも1本の回転用ロール4が駆動ロールであり、前記回転用ロールの中心軸とコイルの中心軸とを結ぶ面と、コイルの中心軸を通る鉛直面とがなす角度θが10°以上80°以下である。
(もっと読む)
ロール体用自動搬送車
【課題】生産設備に配備する作業の簡素化を図ることができるロール体用自動搬送車を提供する。
【解決手段】受け取り装置2に対して受け渡し可能な状態でロール体Aを搬送台車8の上方で支持する搬送車側支持体9と、その搬送車側支持体9に支持されたロール体Aのコアaを搬送台車8に対して移動させる移動操作手段10と、受け渡し箇所に搬送台車8を停止させた状態において、コアaの両端部を一対の装置側支持体6にて支持可能な適正位置にコアaを位置させるべく移動操作手段10の作動を制御する制御手段Hとを搬送台車8に備え、装置側支持体6を撮像するための撮像装置11が搬送台車8に備え、撮像装置11が撮像した撮像情報に基づいてコアaを適正位置に位置させるべく移動操作手段10の作動を制御する。
(もっと読む)
ストッパ付き荷台
【課題】ストッパ付き荷台において、ロール径の異なる種々のロール状の荷物についてその転動を防止できるようにする。
【解決手段】ストッパ付き荷台1は、荷物を載置する略矩形状のテーブル2と、テーブル2に載置されたロール状の荷物11の転動を防止するためのストッパ3とを備える。ストッパ3は、テーブル2に対してその前後方向に移動自在でロール状の荷物11をその転動方向両側から挟み込む一対の当接部31と、当接部31をテーブル2に対して移動させるための取手32とを有する。当接部31は、テーブル2の左右方向、つまり載置されたロール状の荷物11の軸方向と平行に伸びている。取手32は、当接部31の各々の軸方向両端側に設けられている。取手32を操作して当接部31同士の間隔を変更することで、ロール径が異なる種々のロール状の荷物11をその転動方向両側から当接部31によって挟持する。
(もっと読む)
搬送車
【課題】荷物の大きさが異なっても、コストアップせずに荷降ろしをスムーズに行うことができる搬送車を提供する。
【解決手段】水平方向に移動する台車本体11と、荷物3を支承する支承台13と、支承台13を昇降させる昇降機構12とを備え、複数のステーションのそれぞれとの間で荷物3を移載する搬送車1であって、支承台13の高さを検出する高さ検出部143と、支承台13の上昇により荷物3が支承台13に載荷されたことを検出する載荷検出部142と、荷受け時において高さ検出部143及び載荷検出部142により検出された、支承台13に荷物3が載荷された時の支承台13の高さである支承台載荷高さから、荷降ろし時における支承台13の最適な高さを算出する高さ算出部144とを備える。
(もっと読む)
軸体移送装置
【課題】ロール状物の中空巻芯に軸体を挿入する毎に、中空巻芯に対して軸体を位置決めできる軸体移送装置を提供する。
【解決手段】軸体移送装置6は、把持手段8と、進退手段9と、昇降手段10と、中空巻芯3の他方の開口部2に対面する位置に設置された当接部材11と、把持手段8と進退部材12との間に介在し把持手段8に把持された軸体5の端部51が当接部材11により押し返されることを許容する緩衝手段とを備える。中空巻芯3に挿入された軸体5の端部51は、当接部材11によって位置決めされる。
(もっと読む)
原紙ロール搬送装置及び原紙ロールの搬送方法、並びに原紙ロール搬送装置のレイアウト方法
【課題】コルゲータマシン工場内の与えられたスペース内で、原紙ロールの搬出入を効率化することにより、原紙ロールの交換時間を短縮する。
【解決手段】従動・駆動スプロケットに巻き掛けられ、一対の原紙ロール搬送用台車に連結された無端チェーンとを有する原紙ロール搬送装置において、前記無端チェーンは、前記台車の一方に連結された第1無端チェーンと、前記台車の他方に連結された第2無端チェーンとを有し、駆動スプロケットは、第1無端チェーンの第1駆動スプロケットと、第2無端チェーンの第2駆動スプロケットとを有し、前記両駆動スプロケットは、回転駆動手段に同軸上に設けられ、前記一対の台車が待機位置にあるときの両台車間の第1距離と、使用位置にあるときの両台車間の第2距離とに基づいて、前記第1駆動スプロケットの径と前記第2駆動スプロケットの径との比が定められる、ことを特徴とする原紙ロール搬送装置。
(もっと読む)
ロール体搬送装置
【課題】 ロール体の受け取り動作時に、ロール体からのコアの2つの突出部に対して2つのコア受け部を正確に位置決めできるようにする。
【解決手段】 中心にコア210を持ちこのコアがロール体の両端から突出した突出部210−1を有する原反ロール200を、その保持手段との間で受け渡しを行うためのロール体搬送装置であって、前記ロール体の突出部を受けるための2つのコア受け部10−1を備える。そして、前記2つのコア受け部にそれぞれ、前記ロール体からの突出部の端面を非接触で検出する検出装置20−1を設け、検出した位置に応じてコア受け部の位置を調整することにより、突出部とコア受け部の位置合せを正確に行うことができるようにした。
(もっと読む)
ロール体搬送装置
【課題】 ロール体の受け取り動作時に、ロール材の巻きずれに起因するコア受け部とロール体との衝突を防止することのできるロール体搬送装置を提供する。
【解決手段】 中心にコア210を持ちこのコアがロール体の両端から突出した突出部210−1を有する原反ロール200を、その保持手段との間で受け渡しを行うためのロール体搬送装置であって、前記ロール体の突出部を受けるための2つのコア受け部10−1を備える。そして、前記2つのコア受け部にそれぞれ、前記ロール体からの突出部の有効突出長が所定値以上あるかどうかを非接触で検出する検出装置20−1を設け、有効突出長が所定値未満の場合には原反ロールの以後の受け渡し動作を停止させる。
(もっと読む)
ドラム架台
【課題】大きなスペースを必要とせずコンパクトに構成して、簡単にドラムを収納したり又は機械に搬送したりできるドラム架台を提供すること。
【解決手段】ドラム架台1は枠状に形成する架台本体2とキャスター8を備えている。架台本体2には補助台車10を挿通するための開放部を形成し、架台本体2の前面部を地面に接触させたり離隔させたりする接地部31を形成する。ドラム20を架台本体2内に収納する場合は、架台本体2を前傾させて接地部31を地面に接触する。この状態で補助台車10をドラム架台1に連結する。補助台車10をドラム架台1に連結する際には、前傾状態の架台本体2を持ち上げると同時に上下左右の4箇所で連結する。
(もっと読む)
1 - 20 / 30
[ Back to top ]