
Fターム[3F064EA04]の内容
ウェブロールの交換 (2,790) | ウェブロールの移送、台車 (166) | ウェブロール搬送台車 (96) | 昇降機構を持つもの (44)
Fターム[3F064EA04]に分類される特許
1 - 20 / 44
フィルム材の貼合装置
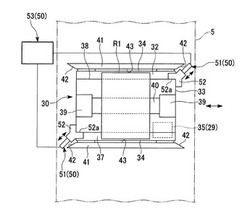
【課題】設置スペースを最小限に抑えつつ、周辺での作業に支障をきたすことがないフィルム材の貼合装置を提供する。
【解決手段】 液晶パネルを搬送するローラコンベア5と、液晶パネルの表裏面に貼合される偏光フィルムの偏光フィルムシートをロールR1から巻き出すと共にハーフカットして切り出す搬送装置と、ロールR1を支持する搬送台車30を備え、搬送台車30がロール収容エリアとローラコンベア5下方のロール配置位置との間を移動可能に設けられ、搬送台車30は、走行するべース部32とこのベース部32上でロールR1を支持するロール支持部33とを備え、ベース部32に対してロール支持部33が水平面内で姿勢変化可能に支持され、搬送台車30とローラコンベア5との間に、ローラコンベア5に対してロール支持部33を位置決めするエアー浮上装置29及び水平方向位置決め装置50が設けられている。
(もっと読む)
ロール体取扱システム、ロール体供給方法およびロール体搬送装置

【課題】ロール体搬送装置からロール体をよりスムーズに受け取る。
【解決手段】ロール体取扱システムは、中空部を有するロール体を搬送するロール体搬送用無人搬送車100と、ロール体搬送用無人搬送車100からロール体を受け取るターレットと、制御部50と、を備える。ターレットは、中空部と着脱可能に構成された一対のチャックと、そのチャックとの相対位置が固定され、中空部を検知するよう構成された中空部検知用センサと、チャックを、ロール体を受け取るための受取停止位置を含む複数の停止位置の間で移動させるターレットアームと、を含む。制御部50は、ロール体搬送用無人搬送車100がロール体を目標位置に向けて移動させる際、中空部検知用センサにおける検知結果および中空部検知用センサとチャックとの位置関係に基づいてロール体が移動すべき量を演算する。
(もっと読む)
ロール体搬送装置
【課題】ロール体の受け取りをよりスムーズに行う。
【解決手段】ロール体搬送用無人搬送車100は、ターレットによって空中に支持されているロール体の胴部に鉛直方向下側から接触する載置台102と、載置台102にかかる荷重を検出する荷重検出部と、荷重検出部によって検出される荷重に基づいて、載置台102がロール体を押す力を調整する荷重調整部と、を備える。荷重調整部は、荷重検出部によって検出される荷重がロール体の重量に近づくように、載置台102がロール体を押す力を調整する。
(もっと読む)
ロール体搬送装置
【課題】ロール体の受け取りをよりスムーズに行う。
【解決手段】ロール体搬送用無人搬送車100は、ターレットによって空中に支持されているロール体の胴部に鉛直方向下側から接触する載置台102と、載置台102にかかる荷重を検出する荷重検出部と、荷重検出部によって検出される荷重に基づいて、載置台102がロール体を押す力を調整する荷重調整部と、を備える。荷重調整部は、荷重検出部によって検出される荷重がロール体の重量に近づくように、載置台102がロール体を押す力を調整する。
(もっと読む)
ロール体搬送装置
【課題】ロール体の受け渡しの際の位置決めをより好適に行う。
【解決手段】ロール体搬送用無人搬送車100は、ロール体の胴部が載置される載置台102と、ターレットに対する載置台102の位置を検出する第1位置検出器138、第2位置検出器140と、載置台102を非鉛直方向に動かす移動部と、載置台102を回転させる回転部と、本体168がロール体をターレットに渡すために停止しているとき、第1位置検出器138、第2位置検出器140によって検出される載置台102の位置が所定の基準位置に近づくように、移動部および回転部のうちの少なくともひとつを制御する制御部50と、を備える。
(もっと読む)
ロール体搬送装置
【課題】工場の床のフラット化を推進しつつロール体搬送装置の背丈の増加を抑える
【解決手段】ロール体搬送装置100は、ロール体が載置されるべき載置台10と、本ロール体搬送装置100を走行レール102に沿って走行させるための走行用車輪群16と、本ロール体搬送装置100を横行レールに沿って走行させるための横行用車輪群22と、本ロール体搬送装置100が走行レールに沿って走行する際、横行用車輪群22を床から離す車輪引上手段と、ロール体の受け渡しの際、載置台10の床からの距離を変える載置台位置調整手段と、を備える。車輪引上手段と載置台位置調整手段とは電動リフタ26を共用する。
(もっと読む)
記録装置
【課題】ユーザーが重労働無くロール媒体ホルダーにロール媒体を装着すること、および、巻き取ったロール媒体を取り外すことを考慮した記録装置を提供すること。
【解決手段】記録装置(1)は、ロール状のロール媒体Rを送り方向下流側へ繰り出し可能な繰り出し手段2と、繰り出されたロール媒体Rに対して記録する記録部13を有する記録装置本体(11)と、記録されたロール媒体Rをロール状に巻き取る巻き取り手段24と、ロール状のロール媒体Rを載置可能な載置部(5)が上下動する昇降装置3と、を備え、該昇降装置3は、少なくとも前記繰り出し手段2にロール媒体Rを取り付けるときに位置する第1の所定位置B1と、前記巻き取り手段24からロール媒体Rを取り外すときに位置する第2の所定位置B2との間で移動可能な構成であることを特徴とする。
(もっと読む)
ロール体搬送装置
【課題】ロール体の受け渡しの際の位置決めをより好適に行う。
【解決手段】ロール体搬送用無人搬送車100は、ロール体の胴部が載置されるべき載置台102と、生産機に対する載置台102の位置を検出する検出手段と、ロール体搬送用無人搬送車100の本体168がロール体の受け渡しのために停止しているとき、検出手段による検出結果に基づいて、載置台102を非鉛直方向に動かす移動手段と、ロール体搬送用無人搬送車100の本体168がロール体の受け渡しのために停止しているとき、検出手段による検出結果に基づいて、載置台102を回転させる回転手段と、を備える。
(もっと読む)
ロール体用搬送車
【課題】挿入部がロール体の端部に干渉したことを検出できるロール体用搬送車を安価に提供する。
【解決手段】走行自在な台車本体に、軸部の両端部を載置支持する一対の支持体を台車本体に対して移動操作する移動操作手段と、ロール体保持装置の挿入部及びロール体の軸部を撮像する撮像手段と、撮像手段の撮像情報に基づいて移動操作手段の作動を制御する制御手段とを設け、制御手段を、設定停止位置に前記台車本体が停止した状態で、位置合わせ処理を実行し、且つ、移動操作手段の作動を停止させた状態で、撮像手段の撮像情報に基づいて軸部が台車本体に対して移動したことが検出されると、異常と判別するように構成する。
(もっと読む)
原反ロール用リフト装置
【課題】 簡単かつ容易に原反ロールを包装機にセットできるようにすること
【解決手段】 包装機用の原反ロールを支持するとともに、その原反ロールをその軸方向にスライドさせて外方に搬出するスライドする機構を備えたテーブル32と、そのテーブルを昇降させる昇降機構12と、昇降機構を支持し、テーブルとともにその昇降機構を移動する台車11とを備える。テーブルは、V型に配置した一対のローラ35を複数段に並列配置して構成される。
(もっと読む)
ロール体搬送台車
【課題】残芯回収動作を確実に、且つ、そのタクトタイムを短くでき、台車を小型化できるロール体搬送台車の提供。
【解決手段】第1の径を有する紙管P1をその芯方向を水平にして支持可能な紙管支持台11と、紙管支持台11を昇降駆動させるリフター12と、平面上において紙管支持台11と異なるセンター位置に設けられ、上記第1の径よりも大きな第2の径を有する巻取紙P2をその芯方向を水平にして支持可能な巻取紙支持台21と、を有するロール体搬送台車1であって、紙管支持台11の上記昇降駆動に応じて、巻取紙支持台21を、センター位置と、上記平面上において巻取紙P2の芯方向と直交する方向でセンター位置よりも紙管支持台11に対して離間した退避位置と、の間で移動させる第2スライダー24を有するという構成を採用する。
(もっと読む)
位置判別装置及びそれが装備された移動体
【課題】被検出物の位置を的確に判別することができる位置判別装置を提供する。
【解決手段】一対の撮像手段11を、それらの光軸が互いに交差し、且つ、光軸の交点oに対して上下方向の下方側に位置し、且つ、光軸の交点oに対して車体前後方向の両側に位置する状態で分散配置して、判別手段を、光軸の交点oの上下方向の下方側及び上方側における光軸の交点oから設定距離未満である範囲を非検出範囲とし、光軸の交点oの上下方向の下方側における光軸の交点oから設定距離以上離れた範囲を検出範囲として、一対の撮像手段11にて撮像された一対の画像における被検出物6の撮像位置の差に基づいて検出範囲における基準位置に対する被検出物6の上下方向での位置を判別するように構成する。
(もっと読む)
ロール体供給装置
【課題】一対のチャックでロール体を支持するロール体支持装置に対して、ロール体を精度良く位置決めして移載することができるロール体供給装置を提供する。
【解決手段】ロール体Rを載置する台車20を有し、コアCの両端に一対のチャック7を係合して支持するロール体支持装置1に対してロール体Rを搬送するロール体供給装置10であって、台車20は、ロール体RをX方向,Z方向に移動させる移動部DR,30と、一対のチャック7のX方向の位置を求める検出部40a,40bと、一対のチャック7のZ方向の位置を求める検出部47a,47bと、を備え、検出部40a,40b,47a,47bの検出結果に基づいて移動部DR,30を制御する。
(もっと読む)
無人搬送車
【課題】無人搬送車において、位置決め部材を用いることなく保持アームを荷物を支持すべき位置に位置決めできるようにし、無人搬送車自体は通常の停止精度でありながら、固定側ステーションに対してロール状の荷物を確実に受け渡しできるようにする。
【解決手段】無人搬送車1は、ロール状の荷物3の両側を支持する一対の保持アーム51と、各保持アーム51を前後及び左右方向に移動させる駆動機構53と、固定側ステーション2を基準に該ステーション2と本車1との相対位置を検出する位置検出センサ6と、駆動機構53を制御する制御ユニット8とを備える。制御ユニット8は、本車1が固定側ステーション2の荷物受け渡し位置まで移動したとき、位置検出センサ6による位置情報に基づき保持アーム51における荷物を支持すべき位置に対する前後及び左右方向のずれ量を算出し、このずれ量に応じ駆動機構53を動作させ各保持アーム51の位置ずれを補正する。
(もっと読む)
コイル搬送装置及びこれを利用するコイルステーション
【課題】マンドレルの上方が障害物で覆われていても、コイルの尾端のスプリングバックによる巻き解けを生じさせることなく搬送できるコイル搬送装置を提供する。
【解決手段】ダウンコイラ200とコイルステーションの100との間を往復移動できるように配設されてコイルCを昇降可能に支承するコイルカー11〜16,19と、ダウンコイラ200の近傍の上方とコイルステーション100の上方との間を往復移動できるように配設されてコイルCの上部を押さえ付ける押付台車20〜29とを備え、押付台車20〜29が、押付台車本体22の下方側で昇降可能となるように基端側を流体圧シリンダ23に片持ち支持されてマンドレル202の軸方向に沿って長手方向を向けるように配向されると共に押付台車本体22のダウンコイラ200側の端部よりも先端側を突出させるようにオーバハングした押さえ板24を備えた。
(もっと読む)
コイル搬送方法およびコイル搬送装置
【課題】特に焼鈍後のコイル変形の問題を有利に解決するためのコイルの搬送方法を提供する。
【解決手段】コイル状に巻取られた金属帯のコイルを熱処理した後、搬送装置を介して該コイルを次工程ラインの入側まで搬送するに当たり、該搬送装置上で前記コイルを当該コイルの中心軸回りに回転させながら搬送するコイルの搬送方法及び装置。前記コイルの回転速度を1回/分以上とし、該コイルの回転は、次工程ラインの入側に配置されたペイオフリールに対するコイル装着完了の30秒以上前に開始する。前記コイルの回転用ロール4,5を2本以上備え、該回転用ロールはコイル外周部と接触してコイルを回転させ、少なくとも1本の回転用ロール4が駆動ロールであり、前記回転用ロールの中心軸とコイルの中心軸とを結ぶ面と、コイルの中心軸を通る鉛直面とがなす角度θが10°以上80°以下である。
(もっと読む)
ロール体用自動搬送車
【課題】生産設備に配備する作業の簡素化を図ることができるロール体用自動搬送車を提供する。
【解決手段】受け取り装置2に対して受け渡し可能な状態でロール体Aを搬送台車8の上方で支持する搬送車側支持体9と、その搬送車側支持体9に支持されたロール体Aのコアaを搬送台車8に対して移動させる移動操作手段10と、受け渡し箇所に搬送台車8を停止させた状態において、コアaの両端部を一対の装置側支持体6にて支持可能な適正位置にコアaを位置させるべく移動操作手段10の作動を制御する制御手段Hとを搬送台車8に備え、装置側支持体6を撮像するための撮像装置11が搬送台車8に備え、撮像装置11が撮像した撮像情報に基づいてコアaを適正位置に位置させるべく移動操作手段10の作動を制御する。
(もっと読む)
移載装置
【課題】ロールの抜き取りミスを低減することができる移載装置を提供する。
【解決手段】ロール10を載置するロール載置部1と、このロール載置部1を昇降する昇降装置2と、この昇降装置2を搭載して走行する無人搬送車3とを備える移載装置において、ロール載置部1は、ロール10の載置時にロール10に接触することにより作動するセンサと、ワークリミットスイッチ18よりもロール10側に突出して設置され、ロール10により押されることにより撓むクッション部材19とを備えた。
(もっと読む)
包装装置
【課題】フィルムリールを包装機構に簡単に装着して使用できる。
【解決手段】包装装置1は、フィルムリールを片持ち支持するリール支軸21を備えた台車2と、フィルムリールからフィルムを繰り出して包装に用いる包装機構4とを備えた。台車2の略U字形状の基部フレーム14の各アーム部14aには2本の位置決めピン17a、17bを設ける。包装機構4に設けた結合部材36には、位置決めピンを嵌合する回転支点溝及び係り止め溝を設けた。台車2の基部フレーム14の下面には高さ調整部材16を介してキャスター15を設け、基部フレーム14の位置決めピン17aとは反対側にハンドル18aを設けた。ハンドル18aから遠い位置決めピン17aを回転支点溝に挿入し且つ支点としてハンドル18aを回動させて、他の位置決めピン17bを係り止め溝に嵌合させて、台車2を包装機構4に位置決めする。
(もっと読む)
新聞巻取紙無人搬送車
【課題】省スペースで、少ないメンテナンス作業負担で、しかも耐久性に優れた新聞巻取紙の載置の有無及び載置の状態を検知する機構を備えた新聞巻取紙無人搬送車を提供する。
【解決手段】キャスター122及び駆動輪を有し床面上を自走する走行台車120と、走行台車120に装着され新聞巻取紙を載置する載荷テーブル140と、載荷テーブル140を垂直方向に昇降駆動する昇降ユニット160とを具備し、載荷テーブル140が、幅方向の左右両側から中央線に向けて傾斜する断面V字状の傾斜面140を有しているとともに中央線上に埋設された少なくとも一つの静電容量型近接センサ142を有していることにより上記の課題を解決する。
(もっと読む)
1 - 20 / 44
[ Back to top ]