
Fターム[3F072GB03]の内容
特殊移送 (6,503) | 識別 (264) | 識別手段を有するもの (41) | 非接触式 (28)
Fターム[3F072GB03]の下位に属するFターム
光学式、バーコードによるもの (11)
Fターム[3F072GB03]に分類される特許
1 - 17 / 17
物品搬送装置
【課題】任意の間隔で搬送されてきた物品を高速で搬送する。
【解決手段】物品認識手段により得た情報に基づき、回転体20の回転中にアーム32を回動させて吸着予定の物品10に対向する吸着位置Uにおいて該物品10を吸着具34で吸着するに際して、上昇位置と下降位置との間の中途範囲において吸着予定の物品10)の斜め上方から前記吸着位置Uを含む下降位置付近に向けて該吸着具34を吸引しながら下降させ、該下降位置付近にて中途範囲よりも吸着具34を遅く下降させるようにアーム昇降モータを変速制御して、物品10を吸着する。
(もっと読む)
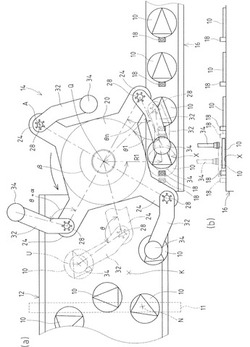
物品搬送装置

【課題】任意の間隔や向きで搬送されてきた物品を高速に搬送する。
【解決手段】物品認識手段により得た物品10の位置に関する情報に基づき、物品10を吸着する順序を定めて回転体20の回転中にアーム32を該情報に応じた回動角度で回動させて物品10を吸着具34で吸着する。物品10の向きに関する情報に基づき、物品10が載置位置Xにおいて特定の方向に向くように吸着具34を回転させて、物品10を載置位置Xを載置する。
(もっと読む)
選果システム
【課題】移送装置の吸着部にて青果物のがく片部を吸着する際に、載置台の側方からその中央側に向かうように吸着部を移動させたときに当該吸着部が青果物が載置される載置台に当接することを防止して、青果物を確実に吸着してトレイへ確実に移送することができる選果システムを提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6のがく片部6bを吸着部66で吸着してトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6をトレイ8に詰める、選果システム1であって、移送装置60の吸着部66にて青果物6のがく片部6bを吸着する際に、載置台5の側方からその中央側に向かうように吸着部66を移動させたときに、吸着部66が載置台5に当接しない位置に青果物6を押上げる、押上げ装置80を有する。
(もっと読む)
被搬送物回転装置
【課題】載置位置において被搬送物が搬送手段上に載置された後、搬送手段によって回転位置にまで被搬送物が搬送されるという動作と、回転位置において被搬送物が回転されるという動作とを行なうことが可能な被搬送物回転装置を提供することを目的とする。
【解決手段】被搬送物回転装置1Aは、被搬送物10の形状に対応した開口部21を有し、載置位置から回転位置にまで移動可能な載置プレート22と、回転位置にある載置プレート22の開口部21を通り抜けるように上昇移動可能な押上部34と、動力伝達軸44周りに回転可能な回転プレート41とを備える。開口部21を塞ぐように被搬送物10が載置プレート22上に載置された後、載置プレート22は回転位置にまで移動する。押上部34が上昇移動することによって被搬送物10が持ち上げられる。被搬送物10は押上部34と回転プレート41とによって挟まれた状態で回転する。
(もっと読む)
容器搬送装置
【課題】袋本体と首部とを有する複数の容器を整列された状態で箱詰めすることが可能な容器搬送装置を提供すること。
【解決手段】袋本体と首部とを有する容器Cを搬送する容器搬送装置Aであり、容器Cを供給する製袋機1、複数の容器Cを受け渡し位置P1まで順次搬送する入り側コンベア2、容器Cを受け渡し位置P1x方向に沿って受け渡し位置P2まで搬送する中間コンベア4、受け渡し位置P1に設置され、入り側コンベア2によって搬送されてきた容器Cを、首部がy方向の一方側および他方側のいずれかを向く姿勢に整列された所定数の容器Cごとに区分して中間搬送コンベア4へ受け渡す整列手段3、受け渡し位置P2に箱Bを順次搬送し、容器Cが詰められた箱Bを排出する出側コンベア6、第2の受け渡し位置P2に設置され、中間コンベア4により搬送されてきた所定数の容器Cを、出側コンベア6により搬送されてきた箱Bに詰める箱詰め手段5、を備える。
(もっと読む)
移載装置およびケーサーシステム
【課題】ワークにストレスをかけることなく、かつ小型で高速にワークをケースに移載できる移載装置およびケーサーシステムを提供すること。
【解決手段】所定の梱包位置である第二位置P302を通過するように連続供給されるケースCにワークWを移載する移載装置であって、ワークWが供給されるマガジン部40と、マガジン部40に供給されたワークWを把持可能な把持体と、前記把持体に把持されたワークWをマガジン部40から空中へと離間させた後に、ワークWを把持した前記把持体を第二位置P302を通過中のケースCへ移送する移送機構30と、を備え、移送機構30は、前記把持体をケースCの移動に追従させてワークWをケースCに案内する追従手段20を有する。
(もっと読む)
パレタイズされるべきパッケージの層を形成するためのシステムおよびパレチゼーションプラント
グリップヘッド(1)は、第1回転軸線(α)を中心に回転するように構成された支持要素(11)、例えば水平板を備え、前記支持要素により2つ以上のグリッパ(12)が枢動自在に結合され、各グリッパはその対称軸線(β)を中心に回転するように構成され、前記回転軸線は互いに平行であり、各グリッパの回転運動は互いに独立している。したがって、各グリッパはその対称軸線(β)を中心に回転し、かつそれらが枢動自在に結合された支持要素の回転軸線(α)を中心に旋回するように構成される。前記グリップヘッド(1)を備えた好ましいプラントは、ベルトコンベヤと、前記グリップヘッド(1)が枢動自在に結合された機械的肢部(2)とを含む。 (もっと読む)
外観検査装置
【課題】複数のチップ部品を順次1つずつ連続して高速に、しかも精度良く確実に外観検査することのできる外観検査装置を提供する。
【解決手段】部品供給機構から搬送路上に供給されたチップ部品を検出する光電センサの出力に基づいて前記搬送路上における複数のチップ部品の並びの良否を判定し(判定手段)、前記搬送路上のチップ部品を撮像するカメラの上流側に設けた排除機構により、並びが不良と判定されたチップ部品を前記搬送路上からを排除して前記カメラによる検査対象から除外する。
(もっと読む)
ワーク積載方法
【課題】スペースを広くすることなくロボットとパレット及びパレットを取り囲む光電管柱等との干渉を防止して装置の大型化及び装置コストの増大を防止する。
【解決手段】第1のパレット4から取り出したガラス3を第2のパレット5に移し替えるワーク取り出し装置7で、このワーク取り出し装置7を手首部分6に取り付けたハンドリングロボット2とこれに対向する第1のパレット4Jとの間で、且つ、該ハンドリングロボット2に対向する位置から前記第2のパレットの走行方向にオフセットさせた位置に前記第2のパレット5を配置して、前記オフセット側とは反対側からガラス3を第2のパレット5に積載させる。
(もっと読む)
果物の分類包装システム
卵と果物(10)から成るグループから選択された物品を分類し包装するシステムである。分類包装システムは、複数のキャリヤが設けられた少なくとも1つの分類トラック(1)を有する分類装置と、各物品(10)の少なくとも1つの特性を判定するための少なくとも1つのセンサと、少なくとも1つの特性に従って物品を分類するように構成された制御装置と、例えば、箱、かご、トレイといった包装ユニットを供給して排出し、分類トラックと交差して分類トラックの上方に延在する複数の包装コンベヤを備える。各包装コンベヤに隣接して、包装コンベヤ以上の高さに、移送装置が設けられ、移送装置は、分類装置のキャリヤから前記物品の1つを取り上げ、物品を対応する包装コンベヤの包装ユニットの中に載置するように構成されている。  (もっと読む)
(もっと読む)
レバーセグメントを有する、たばこ加工産業の搬送ドラム
【課題】たばこ加工産業のフィルター装着機械の搬送ドラムであって、ロッド形状の品物のための収容部を有するレバーセグメントが、ドラム上の嵌合部内において旋回可能に軸受けされており、且つ、これらレバーセグメントが収容部のための吸気穿孔を有している様式の上記搬送ドラムにおいて、吸気穿孔への空気案内部を改良することにより、ロッド形状の品物を確実に保持できるようにする。
【解決手段】搬送ドラム10は、レバーセグメント25の少なくとも1つの吸気穿孔18が、それぞれに嵌合部22とこのレバーセグメント25の少なくとも1つの収容部27、28との間で、専ら半径方向に外方へと形成されていることによって可能となる。
(もっと読む)
搬送ワーク、搬送ワーク認識システム及び搬送ワークの仕分けシステム
【課題】ICチップ等のデータキャリア及びアンテナコイルを有する搬送ワークに対して、信号の送受信をするリーダ・ライタを搬送ワークのほぼ上方であって、且つ接近した位置に設けることができるようにする。
【解決手段】搬送ワークの仕分けシステム10は、原流側コンベア12と支流側コンベア14との交差部近傍に設けられた仕分け装置18を含んでなり、搬送ワーク16は、コンベア上を搬送される基部17と、その中心に立設された小径の円筒部19と、この円筒部に配置されたアンテナコイル52と、ID情報が書き込まれているデータキャリア50とが設けられていて、前記アンテナコイル52は、その中心軸線が搬送面に対してほぼ直交するように配置されていて、搬送ワーク16の搬送路の側方であって、基部17よりも高い位置に接近して設けられたデータキャリア54との送受信が可能とされている。
(もっと読む)
帯状部材の搬送切断方法および装置
【課題】 省スペース化を図りながら、帯状部材12の切断角度Sの変更時における作業能率を向上させる。
【解決手段】 切断手段15による帯状部材12の切断角度Sが変更されると、変更された切断角度Sに応じて第3コンベア36によるシート片16の旋回角度を変更し、第2コンベア17にシート片16が常に所望の姿勢で搬送されるようにする。このように第3コンベア36によるシート片16の旋回角度を変更するだけで対処することができ、この結果、第2コンベア17を揺動させるための広い設置スペースが不要となって、省スペース化を図ることができるとともに、容易に作業能率を向上させることもできる。
(もっと読む)
搬送・仕分けシステム
【課題】原流側コンベアにより搬送されてくる搬送ワークを支流側コンベアに移したり、あるいは移さなかったりする場合に、低騒音で、機械的摩擦や衝撃が少なく、高速で搬送・仕分けが可能なシステムを提供する。
【解決手段】搬送・仕分けシステム10は、原流側コンベア12と支流側コンベア14との交差部に設けられた仕分け装置18からなり、この仕分け装置18は、支流側コンベア14に移載する搬送ワーク16を、搬送凹部に取り込んだときに、吸着装置22の吸着口26によって吸着して、仕分けロータ20と共に支流側コンベア14上にまで回転移動させ、ここで負圧を解除して、搬送ワーク16を支流側コンベア14に移載するものであり、前記仕分けロータ20は一体的に回転する上段及び下段仕分けロータ20A、20Bからなり、前記搬送凹部は上段及び下段仕分けロータ20A、20Bの上段及び下段搬送凹部28、30を、回転方向に位相をずらして大きさを調節して構成されている。
(もっと読む)
搬送・仕分けシステム
【課題】原流側コンベアにより搬送されてくる搬送ワークを支流側コンベアに移したり、あるいは移さなかったりする場合に、低騒音で、機械的摩擦や衝撃が少なく、高速で搬送・仕分けが可能なシステムを提供する。
【解決手段】搬送・仕分けシステム10は、原流側コンベア12と支流側コンベア14との交差部近傍に設けられた仕分け装置18からなり、この仕分け装置18は、支流側コンベア14に移載する搬送ワーク16を、搬送凹部28に取り込んだときに、吸着装置22の吸着口26によって吸着して、仕分けロータ20と共に支流側コンベア14上にまで回転移動させ、ここで負圧を解除して、搬送ワーク16を支流側コンベア14に移載する。
(もっと読む)
自動作業システム
【課題】データキャリアに対する情報の書込み或は読取りのために、搬送手段を停止させずとも済む自動作業システムを提供する。
【解決手段】データキャリアをワーク2に設け、第1および第2のロボットアーム5および8の先端部にリードライト装置を設ける。検査装置4での検査結果情報をデータキャリアに書き込む動作を、第1のロボットアーム5の先端部が検査装置4のワーク2に接近してから当該ワーク2を搬送中のパレット3上に載置して上昇するまでの間に行う。そして、ワーク2を検査結果に応じて良品収納ケース6或は不良品収納ケース7に分けて収納するために、データキャリアに書き込まれた検査結果情報を読み取る動作を、搬送中にあるワーク2に追従して移動するようになってからワーク2を把持してベルトコンベア装置1から取り出すまでの間に行う。
(もっと読む)
ワーク搬送システム
【課題】 ワーク詰りが生じることなく、ワークを一つずつ確実に搬送テーブルのワーク収納部に装填することができるワーク搬送システムを提供する。
【解決手段】 本発明は垂直に配置されたテーブルベース2と、テーブルベース2上に回転自在に配置された搬送テーブル3と、搬送テーブル3に対して直交して配置されたリニアフィーダ6とを備えている。リニアフィーダ6と搬送テーブル3との間に、リニアフィーダ6から供給されるワークwを1つずつ分離する分離シュート7が設けられている。ワークwは長方形断面を有し、リニアフィーダ6の供給フィーダ6aは長辺9aと短辺9bとを有する第1V形溝9を有している。第1V形溝9の短辺9bにワークwの長辺20aがくると、ワークwは供給フィーダ6aから落下する。
(もっと読む)
1 - 17 / 17
[ Back to top ]