
Fターム[3F079CA27]の内容
物品の選別 (7,206) | 選別(検知、検査、測定対象) (1,629) | 被選別物の状態、特性 (1,322) | 体積 (13)
Fターム[3F079CA27]に分類される特許
1 - 13 / 13
大塊搬送物検知システム
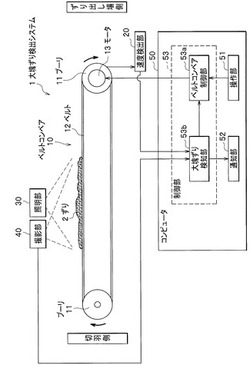
【課題】大塊搬送物を好適に検知することが可能な大塊搬送物検知システムを提供する。
【解決手段】大塊ずり検知システム1は、ずり2を搬送するベルト12を有するベルトコンベア10と、ベルト12上のずり2に光を照射する照明部30と、光が照射されたずりを時間を空けて複数回撮影する撮影部40と、ずりに一方から光が照射された時刻t1に撮影された第一の画像とベルト12の走行によってずりに他方から光が照射された時刻t2(>t1)に撮影された第二の画像とに基づいて、大塊ずりを検知する大塊ずり検知部53bと、を備え、大塊ずり検知部53bは、ベルト12の速度をvとしたとき、v・(t2−t1)に基づいて第一の画像及び第二の画像の位置合わせを行って第一の画像及び第二の画像の論理積画像を生成し、論理積画像から大塊ずりを検知する。
(もっと読む)
果菜物仕分設備

【課題】 収穫した果菜物をトレイに載せて搬送しながら選別仕分けして、箱詰処理する等の作業形態は、比較的小規模であることが多く、トレイコンベアの設置床面積も狭く制限され易い。
【解決手段】 トレイTを載せて直進状の往行程Aから復行程Bへ折返し循環搬送するトレイコンベア1の仕分行程Eの外側に、前記仕分装置3によって仕分けられたトレイTを受け継いで搬送しながら、このトレイTの果菜物Wを取出処理する各取出コンベア4を前記直進状の各仕分行程Eの外側に沿って平行状に形成する果菜物仕分設備の構成とする。
(もっと読む)
振動付与装置
【課題】従来の振動付与装置ではその振動ローラの配設位置がベルトコンベアの搬送ベルトに対して固定されていたため、選別ベルトへ一律の振動しか与えることができなかった。そのため、選別対象や搬送ベルトの搬送速度などの選別条件が変化したとき、振動付与装置から選別ベルトへ与えられる振動が上記選別条件に適さなくなるおそれがある。そのため、選別ベルトコンベア装置の選別効率に低下をきたす場合が生じていた。
【解決手段】ベルトコンベアの搬送ベルトへ振動を付与する振動付与装置であって、前記搬送ベルトの下方において該搬送ベルトの幅方向へ配置される回転軸と、該回転軸から突出して配置され前記搬送ベルトへ干渉する振動ローラとを備える振動付与装置において、前記回転軸の軸方向に前記振動ローラを移動可能とする軸方向位置変更部と、前記回転軸の半径方向に前記振動ローラを移動可能とする半径方向位置変更部と、を備える振動付与装置。
(もっと読む)
非磁性金属の識別方法
【課題】銅、アルミニウム、マグネシウム等の比較的大きな形状の破砕金属片に対してその材質を自動的に識別しその結果に基づいて識別すること、ならびに、アルミニウム合金破砕金属片に対して展伸材と鋳造材に由来するものを自動的に識別しその結果に基づいて識別することが可能な簡素かつ高性能な自動識別方法を実現する。
【解決手段】
非磁性金属の識別方法は、破砕金属片1を供給する供給装置2、供給された破砕金属片1を搬送するベルトコンベア3、5、破砕金属片1の重量を測定する重量計4、フォトセンサ6、レーザー3次元計測器7、及び分別回収機構を備えた非磁性金属識別装置を利用し、これらの動作を制御装置19によって統括制御を行い、材質毎に識別して、回収する。
(もっと読む)
莢果判別構造
【課題】莢への豆の収容状態を適切に判別する。
【解決手段】莢果選別装置10では、莢果18が、第2ベルト30によって前方へ搬送されて、光電センサ32の投光部34と受光部36との間を通過することで、投光部34が投光して莢果18に遮られない光を受光部36が受光して、光電センサ32が莢果18の位置毎の厚さを測定する。これにより、莢果18の所定厚さ以上の位置の数と莢果18の所定厚さ未満の位置の数とに基づき、莢20への豆22の収容状態を適切に判別できる。
(もっと読む)
自走式検査機
【課題】移動式処理機により生成される処理物の品質向上に寄与することができる移動式検査機を提供する。
【解決手段】被処理物の発生現場にて移動式処理機の被処理物又は処理物を検査する移動式検査機であって、下部車体上に設けた動力装置及びホッパと、ホッパの下方位置から延在するコンベヤ40と、ホッパに受け入れた被検査物の検査データを検出する検出部500と、検出部500よりも下流側の位置で被検査物をコンベヤ40上から除去する選別装置60と、検出部500で検出された検査データを基に算出された被検査物の特徴量を記憶部592から読み出した設定値と比較し、コンベヤ40上の被検査物の品質の良否を判定する判定部564と、判定部564から入力された品質不良の被検査物の情報を基に選別装置60を制御する選別装置コントローラ580とを備える。
(もっと読む)
バケット式選別装置
【課題】物品に関する複数の情報を認識することができ、選別精度の向上が図れるバケット式選別装置を提供する。
【解決手段】物品供給領域aのエリアa1〜a6において、手で保持した農産物Aをバケットコンベヤ2のバケット13…に載置する際に、作業者Dの目視判定に基づいて、農産物Aが載置されたバケット13を左側傾斜姿勢、右側傾斜姿勢に傾けるか、中立水平姿勢に位置させる。エリアa1〜a6の傾き検出センサS2,S3から出力される傾き検出信号に基づいて、バケット13に載置された農産物AがAランク、Bランク、Cランクのいずれに該当するか判別する。また、エリアa1〜a6の物品通過検出センサR1〜R6から出力される通過検出信号に基づいて、等級別に区分した何処のエリアa1〜a6にて農産物Aがバケット13に載置されたかを判別する。
(もっと読む)
物品選別装置
【課題】ネットワーク上の他のハードウェア資源を有効活用することで高処理能力の演算CPUを不要にしてコスト低減と小型化・長寿命化を図るとともに、所要の選別精度を確保し得る信頼性に優れた物品選別装置を提供する。
【解決手段】搬送路5上に検出領域11を有しその領域を通過する物品Wの品質状態を表す検出信号を出力する検出手段10と、検出信号に対し第1の演算を実行する演算手段21eと、その演算結果に基づき物品Wに対する第1の判定結果を出力する判定手段21aと、検出信号をLAN上の外部のデータ処理装置50に出力しそこで検出信号を第2の演算により処理した第2の判定結果を入力するデータ通信手段23、24と、第1及び第2の判定結果に基づき両判定結果の優先順位を決定する優先順決定手段21cと、優先順位に従って優先されるいずれか一方の判定結果に応じて選別制御信号を生成する選別制御手段21bとを備える。
(もっと読む)
袋詰め肉部位の供給装置
【課題】4分別した4単位の肉部位を、4搬送ラインで4種類の包袋によって包装することで、使用する包袋の面積ロスを防止する。
【解決手段】第1コンベヤ10により一定の時間間隔で搬送する畜産肉部位の、太さと長さとを測定器13で測定して、その検出信号を制御器15に入力し、前記の測定データから前記部位を4分割する。そして太い、細い分別した2種部位A・Bを、さらに長短 A2・B2に分別し、そのうちの短い部位をリフトコンベヤ20で持ち上げ、4ライン23、24で大小4種単位の包袋で包装する。
(もっと読む)
造粒ディスクからのオーバーサイズペレットの除去装置
造粒ディスクからのオーバーサイズペレットの除去装置は、同一平面上にあり、互いに平行であり、かつ水平プレート(2)に結合されている一連の円筒状ロッド(1)によって画定された鋤状工具(10)を有し、前記水平プレート(2)の中央部分は、軸方向を通り、伸縮自在のアーム(21)の先端部分に結合された垂直スリーブ(23)に選択的かつ調整可能に取り付けられるように、垂直かつ上方に突出している垂直管状アーム(3)に結合しており、前記垂直管状アーム(3)は、前記造粒ディスク(30)の近くに取り付けられており、前記造粒ディスク(30)の作動領域の上に突出しているトラス構造(20)を構成している。  (もっと読む)
(もっと読む)
鶏卵の選別集合装置
【課題】 連続的に搬送される鶏卵の一部をサンプル鶏卵として抽出し、抽出されるサンプル鶏卵に対し、当該鶏卵に関連する情報を付加し、当該鶏卵に関連する情報が付加されたサンプル鶏卵を所定の集合区画に集めることのできる鶏卵の選別集合装置を提供する。
【解決手段】 分配コンベア3により搬送される鶏卵Eの一部をサンプル鶏卵として抽出するサンプリング手段6aと、前記サンプリング手段6aによりサンプル鶏卵として抽出される鶏卵に対し、当該鶏卵に関連する情報を付加する情報付加手段9とを備え、前記集合区画5a〜5eのうち、集合区画5eに前記情報付加手段9により当該鶏卵に関連する情報が付加されたサンプル鶏卵を集合させる構成としている。
(もっと読む)
再生利用可能な材料を圧縮、分別および保管する装置、システムおよび方法
【課題】
【解決手段】装置、システムおよび方法が、再生利用可能な材料の圧縮、分別および保管のために開示されている。この装置は、一つの実施例では、再生利用可能な材料のタイプを選択し、再生利用可能な材料を圧縮された形状に変形し、再生利用可能な材料を指定された容器112に保管する。この装置は、再生利用可能な材料で作られた物品を受け入れるための1以上の開口部104を具えた封入機102と、選択モジュール106、複数の形状変形モジュール108、複数の容器112および選択モジュール106によりなされた選択に応じて自動的に再生利用可能な材料を選択された材料のタイプに従って複数の容器112のうちの一つに導く誘導モジュール110を有する。システムは、ある実施例では、再生装置1002および1以上のモジュール式の形状変形装置1018を有する。モジュール式の形状変形装置1018は、入替可能であってもよい。
(もっと読む)
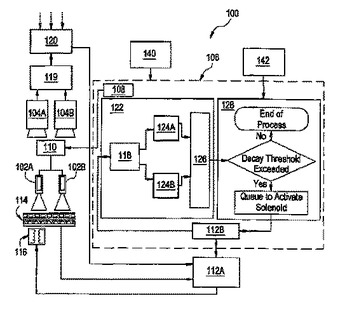
青果物の損傷を検出する方法及び装置
青果物の損傷に基づいて青果物を選別する方法および装置が開示される。ビームエミッタ(102A、102B)は、青果物の外面に向けて照明光を放射する。ビーム検出器(104A、104B)は、照明光に対応して青果物が生成した反射光のほぼ単一波長を検出する。制御ユニットは(106)は、反射光に応じて損傷の存在、量及びひどさの少なくとも1つを判定する。制御ユニット(106)は、損傷の判定に応じて青果物に損傷分類区分を割り当てる。
 (もっと読む)
(もっと読む)
1 - 13 / 13
[ Back to top ]