
Fターム[3F112MB09]の内容
線材用巻芯等の交換、搬送、口出し (1,564) | 線材の検知 (55) | 糸継ぎ関連(有無、頻度等) (18)
Fターム[3F112MB09]に分類される特許
1 - 18 / 18
紡績ユニット及び紡績機
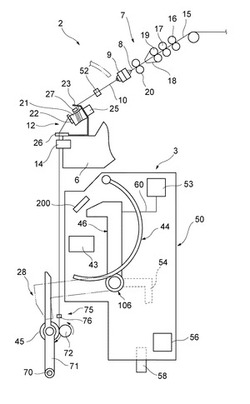
【課題】吸込口部による紡績糸の糸端の予期せぬ吸い込みを防止する。
【解決手段】紡績ユニット2は、紡績糸10を供給する空気紡績装置9と、紡績糸10をパッケージ45に巻取る巻取装置28と、糸継ぎを行うスプライサ43と、パッケージ45から紡績糸10の糸端をサクションマウス104によって捕捉して、捕捉した紡績糸10の糸端をスプライサ43の糸継位置へ案内するサクションマウスモジュール46と、サクションマウス104を移動可能とするカム駆動機構53と、を備える。カム駆動機構53は、少なくとも、サクションマウス104の位置を、パッケージ45から紡績糸10の糸端を捕捉する捕捉位置、捕捉した糸端をスプライサ43の糸継位置へ案内する案内位置、及び、案内位置よりも捕捉位置から離れた位置であり、且つ、案内位置よりも、空気紡績装置9と巻取装置28との間の糸道から離れた退避位置、に移動させる。
(もっと読む)
糸巻取機及び糸巻取ユニット

【課題】糸継終了時に発生する糸のたるみを解消した糸巻取機を提供する。
【解決手段】糸継装置43は、紡績装置とパッケージとの間の紡績糸10を糸継ぎする。糸道規制部材(糸寄せレバー96及び糸押さえレバー98)は、紡績糸10に接触することで当該紡績糸10を屈曲させる位置と、前記紡績糸10を開放した位置と、の間で移動可能である。台車制御部は、糸道規制部材を、糸継ぎの際に紡績糸10に接触させて当該紡績糸10を屈曲させるとともに、当該糸継ぎの終了後、少なくとも巻取装置における紡績糸10の巻き取りが開始するまでの間は、紡績糸10を屈曲させた状態を維持するように制御する。
(もっと読む)
巻取りユニット
【課題】下糸捕捉案内装置および上糸捕捉案内装置と、これら両捕捉案内装置を旋回駆動する駆動機構のメンテナンス作業を、ユニットフレームの一側の外面から簡便に行うことができる巻取りユニットを提供する。
【解決手段】ユニットフレーム2の一側の外面に、給糸ボビン4側の糸端である下糸と、パッケージP側の糸端である上糸とを繋ぐ糸継ぎ装置12と、下糸を糸継ぎ装置12に受け渡す下糸捕捉案内装置16と、上糸を糸継ぎ装置12に受け渡す上糸捕捉案内装置17とを配置する。下糸捕捉案内装置16は、第1駆動機構27により上下に旋回可能に構成し、上糸捕捉案内装置17は、第2駆動機構47により上下に旋回可能に構成する。第1駆動機構27、および第2駆動機構47のそれぞれを、ユニットフレーム2の一側の外面に配置する。
(もっと読む)
綾巻きパッケージを形成するための繊維機械
【課題】互いに並列して配置されている巻取り部を有していて、これらの巻取り部は巻取りパッケージに接近可能な吸込みノズルをそれぞれ有しており、この吸込みノズルは共通の負圧供給装置に接続されている形式の、綾巻きパッケージを形成するための繊維機械の融通性を改良し、特に綾巻きパッケージのいわゆる上糸の収容を最適化することである。
【解決手段】吸込みノズル12に、該吸込みノズルの吸込み作用を変えるための装置14が対応配置されていて、該装置は制御可能な駆動装置15によって調節可能であり、かつ巻取りパッケージに巻きつけられた糸の種類に関連して、所定の開放位置に調節可能であり、吸込み作用を変えるための装置14が、駆動装置15によって、あらかじめ規定可能な時間内であらかじめ規定可能な開放位置の間で調節可能である。
(もっと読む)
糸継ぎ装置に配置された糸供給器の旋回ストロークを較正するための方法ならびに該方法を実施するための糸継ぎ装置
【課題】通常の巻取りプロセス中に時々必要となる糸継ぎ過程において、所定の作業位置へ旋回導入された糸供給器が所望の作業位置に実際にも正確に位置決めされることを比較的容易に確保することのできる方法を提供する。
【解決手段】糸供給器30を、その旋回ストロークを較正するために、センサにより設定されたゼロ位置Iから、糸供給器30の正規の旋回ストローク外に配置されたストッパ18,20に当接するまで旋回させ、旋回過程の間、ステップモータ36により実施された作業ステップの回数をカウントして、作業ステップの基準値として設定された回数と比較し、該比較により、補正ファクタを形成し、後続の、糸継ぎ過程の途中で正規の巻取り運転中に必要となる旋回過程において、該旋回過程の際に前記補正ファクタを考慮することにより、規定可能な作業位置における当該糸供給器30の正確な位置決めを保証する。
(もっと読む)
綾巻きパッケージを製作する繊維機械の作業部
【課題】給糸ボビンから綾巻きパッケージへのほぼ無塵の巻返しが保証されると共に、作業部のピッチ間隔が、従来使用されていた作業部におけるよりも小さく形成されているような作業部を提供する。
【解決手段】作業部1が、糸走行路を取り囲む、複数部分から成る糸案内通路6を有しており、該糸案内通路6が、種々の糸監視・処理装置のための収容ハウジング18,21もしくは収容区分31,32,33を備えており、ただし前記糸案内通路6は繰出し位置ASに位置決めされた給糸ボビン2と、巻取り装置4との間に延びていて、必要に応じて所定の区分毎に負圧をかけられて、前記糸案内通路6に負圧流が生ぜしめられるようになっており、しかも該負圧流の流れ方向が、規定されて設定可能である。
(もっと読む)
糸巻取装置
【課題】レイアウトの自由度を向上させるとともに、糸継装置まで糸を短時間で案内することができる糸巻取装置を提供する。
【解決手段】本実施形態の自動ワインダは、ボビン支持部7と、糸貯留装置18と、巻取部8と、糸継装置14と、上糸案内部と、を備える。ボビン支持部7は、給糸ボビン21を支持する。糸貯留装置18は、給糸ボビン21から解舒された糸20を貯留する。巻取部8は、糸貯留装置18上に貯留された糸20を巻き取ってパッケージ30を形成する。上糸案内部は、糸貯留装置18から糸を引き出して糸継装置14まで案内する。また、上糸案内部は、糸貯留装置18上の糸20を引き出してボビン支持部7側に吹き飛ばすガイド筒7と、ガイド筒7によって吹き飛ばされた糸20を捕捉して糸継装置14に導入する上糸捕捉部13と、を備える。
(もっと読む)
糸継装置およびそれを備えた糸巻取装置
【課題】上糸と下糸とをそれぞれの解撚作業位置へ正確に案内することができる糸継装置およびそれを備えた糸巻取装置を提供する。
【解決手段】撚り継ぎすべき下糸YAと上糸YBとを解撚するディスク部材33・33と、ディスク部材33・33の解撚作業位置YAW・YBWまで下糸YAと上糸YBとを案内する案内部材と、前記案内部材まで下糸YAと上糸YBとを導入する糸寄せレバーと、を具備するディスクスプライザ30であって、案内部材には、下糸YAを解撚作業位置YAWに案内する下糸案内部42Aと、上糸YBを解撚作業位置YBWに案内する上糸案内部42Bと、が形成され、糸寄せレバーには、下糸YAを下糸案内部42Aまで導く下糸位置決め部32Aと、上糸YBを上糸案内部42Bまで導く上糸位置決め部32Bと、が形成される。
(もっと読む)
巻取ユニット及び糸巻取機
【課題】巻取作業の作業速度を向上し、かつ、パッケージPの表面と吸引口50aとの距離を、糸端の捕捉作業を行うのに適切な距離Aに維持することができる巻取ユニットを提供する。
【解決手段】巻取ユニットは、糸端の捕捉作業時に、接触部材64が、捕捉パイプ50に接触して吸引口50aとパッケージPの表面との距離を規定するように構成されている。そのため、糸端の捕捉作業時に捕捉パイプ50がパッケージPに対して旋回する速度を向上し、吸引口50aがパッケージPに衝突することを防止することができる。また、巻取ユニットは、接触部材64と捕捉パイプ50が接触する接触位置Fを、接触部材調整モータ58によって変更可能に構成されているので、パッケージPの表面と吸引口50aとの距離を、糸端の捕捉作業を行うのに適切な距離Aに維持することができる。
(もっと読む)
糸巻取装置及びそれを備える自動ワインダ
【課題】パッケージに巻き取られる糸長さを精密に測定することができる糸巻取装置を提供する。
【解決手段】自動ワインダの巻取ユニット10は、パッケージ30に所定長さの糸を巻き取るように構成される。この巻取ユニット10は、糸プール部71と、サーボモータ55と、糸長制御部90と、を備える。糸プール部71は、パッケージ30に巻き取られる前の糸を貯留する。サーボモータ55は、糸プール部71に糸を供給するために駆動される。糸長制御部90は、パッケージ30に所定長さの糸が巻き取られるように、サーボモータ55の正転パルス信号を供給カウント部91によってカウントする。そして、正転パルス信号のカウント値から、パッケージ30に巻き取られた糸長さが算出される。
(もっと読む)
ブロワモータの制御方法とブロワシステム
【課題】センサなどの付加的な装置を用いることなくブロワを駆動するモータの回転数を制御でき、また、必要とする最低限の負圧を供給しながら、ブロワを駆動するモータの回転数を抑制でき、自動ワインダーを円滑に稼動させながら省エネルギー化を図る。
【解決手段】各ワインディングユニット1の糸継ぎ動作回数と、糸継ぎに失敗した失敗回数とを集計してシステム全体のミス率を算出する。算出したミス率に基づいて前記ブロワモータ18に電力を供給するインバータ19の出力周波数を増減制御する。
(もっと読む)
繊維機械
【課題】高い生産性を備える繊維機械を提供する。
【解決手段】自動ワインダ1は、給糸ボビン5から解舒され巻取管7に巻き取られる紡績糸Yに対して糸継を行う糸継装置20と、糸継装置20よりも上流側の紡績糸Yとしての下糸Y2を吸引して該下糸Y2を糸継装置20に案内する下糸案内装置64と、を有し、紡績糸Yを巻取管7に巻き取ってパッケージ6を形成する巻取ユニット2を複数で備える。複数の巻取ユニット2に、下糸案内装置64が下糸Y2を吸引したことを検知する下糸検知センサ66を設ける。自動ワインダ1は、下糸案内装置64が下糸Y2を糸継装置20に案内するに際し、下糸案内装置64が下糸Y2を吸引したことを下糸検知センサ66が検知したら、下糸Y2を糸継装置20に案内するように下糸案内装置64を制御する下糸案内動作制御部91を備える。
(もっと読む)
ディスクスプライサを備えた自動ワインダ
【課題】ディスクスプライサ7の摩耗部品たるディスク部材7a・7aの交換の要否を適切に且つ容易に把握可能な自動ワインダ100を提供する。
【解決手段】複数の巻取ユニット1の夫々は、一対のディスク部材7a・7aをすり合わせることにより、給糸ボビン側紡績糸としての下糸Y1と巻取ボビン側紡績糸としての上糸Y2を解撚・加撚して糸継するディスクスプライサ7と、該ディスクスプライサ7の動作を制御するためのディスクスプライサ制御部52と、を備える。このディスクスプライサ制御部52は、前記機台制御装置70に対して、前記ディスクスプライサ7の動作を報告するように構成される。前記機台制御装置70は、前記ディスクスプライサ制御部52から報告されたディスクスプライサ7の動作の回数を積算するディスクスプライサ動作回数積算部72を備える。
(もっと読む)
自動ワインダーにおける巻取パッケージの口出し方法及び自動ワインダー
【課題】巻取パッケージの多重口出しを確実に防止して、不良糸を巻取パッケージに巻き取らないようにする。
【解決手段】給糸ボビンから巻取パッケージ2に糸を巻き返す際、切断した糸を吸引捕捉して糸継ぎ手段に案内して糸継ぎする自動ワインダーにおいて、巻取パッケージ2側の糸Y’を吸引捕捉するための吸引口4aを巻取パッケージ2に近接した状態で、巻取パッケージ2を巻取方向2aに回転し、その後、巻取パッケージ2を巻取方向と逆方向2bに回転すると共に、吸引口4aを巻取パッケージ2から離反して、巻取パッケージ2側の糸Y’を糸継ぎ手段に案内する。
(もっと読む)
糸継ぎ装置および糸継ぎ方法
【課題】 巻取パッケージ側の糸端と給糸側の糸端とを糸継ぎする際に、巻取パッケージの表面を傷めずに巻取パッケージに巻かれた糸欠点部分を確実に捕捉し全て除去可能とする糸継ぎ装置および糸継ぎ方法を提供することである。
【解決手段】 糸継ぎ部材と、巻取パッケージの表面に接近して糸端を吸引して糸継ぎ部材まで案内する糸端捕捉手段1と、巻取パッケージを糸解舒方向に回転させる逆転手段2とを備えて、前記糸端捕捉手段1を、巻取パッケージの表面に接近して糸端を吸引する捕捉位置1Bと、糸の不良部分を連続吸引する吸引位置1Cと、吸引した糸端を糸継ぎ部材まで案内する待機位置1Aとに移動自在とする糸継ぎ装置Pとし、前記吸引位置1Cを巻取パッケージPW1から離れた位置とする糸継ぎ方法とした。
(もっと読む)
糸巻取機
【課題】所謂ダイレクトドライブ方式の糸巻取機において、糸継要求があったとき等のパッケージ逆転を伴う糸端引出し作業時に、パッケージ径の大小にかかわらず繰出し量を安定化させ、生産効率を向上できる構成を提供する。
【解決手段】巻取チューブに糸が巻かれて形成された糸層の径を検出する径センサと、前記糸層の周面に近接して糸端を吸い込むとともに当該糸端を糸継装置に案内する糸端引出し作業を行う糸端捕捉案内手段と、を備える。上記糸端引出し作業の際に各部を制御する制御装置は糸端繰出し量制御手段を備え、この糸端繰出し量制御手段は、パッケージ駆動モータを前記巻取ボビンを逆転駆動するように制御するとともに、前記径センサで検出された糸層の径に応じて前記巻取ボビンの逆転速度又は逆転時間をn段階(ただし、nは2以上の整数)で変化させるように制御する。
(もっと読む)
空気紡績機および紡績システム
【課題】空気紡績機において、紡績速度の高速化を図ろうとすると、糸継ぎの継ぎ目品質の低下を招くだけでなく、糸継ぎ成功率の低下により機械効率が低下して高速化に反する結果を招くだけでなく、糸欠点除去等の糸継ぎ動作に要する時間自体が、高速化に反する要因となる。
【解決手段】糸欠点を除去した完成品としての二次パッケージを形成する材料としての一次パッケージ、を製造する空気紡績機であって、紡績糸8を製造する空気式紡績装置10と、紡績糸8の有無を検出する糸検出装置20と、紡績糸8を巻き取って一次パッケージ1を形成する一次巻取り装置40と、一次パッケージ1の満巻時もしくは糸検出装置20による糸無し検出時に、一次巻取り装置40より一次パッケージ1を払い出させる玉揚げ台車6と、を備える。
(もっと読む)
糸巻取機における糸継方法、及び糸巻取機
【課題】 糸巻取機において、成功率の高い糸継方法を提供する。
【解決手段】 供給される糸4を巻き取るパッケージ6を支持するクレードル7と、このクレードル7に備えられるとともに、そのモータ軸が前記パッケージに連結されるモータ21と、前記パッケージ6の周面に接触して回転可能なローラ8と、前記パッケージ6を前記ローラ8から離間させるようにクレードル7を移動させる離間機構9と、を有する構成において、前記離間機構9によりパッケージ6を前記ローラ8から離間させた状態で、前記モータ21によりパッケージ6を糸巻取時とは反対方向に回転させて口出しを行い、この口出しされた糸端と供給側の糸とを糸継ぎする。
(もっと読む)
1 - 18 / 18
[ Back to top ]