
Fターム[3F204BA04]の内容
クレーンの細部(制御、安全) (2,955) | 荷物係合要素の種類 (205) | 荷物係合要素 (205) | スプレッダー (72)
Fターム[3F204BA04]に分類される特許
1 - 20 / 72
走行式クレーン及び走行式クレーンの改修方法
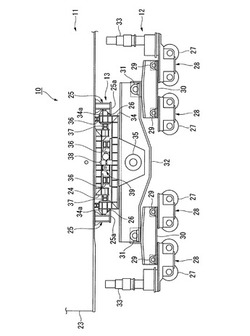
【課題】地震発生時にクレーン本体を走行部に対して横行方向へ相対移動させるスライド機構を有し、短い工期と安価なコストでの製作が可能な走行式クレーンを提供する。
【解決手段】本発明に係る走行式クレーン10は、クレーン本体11と、クレーン本体11を支持するとともに、所定の走行方向に走行可能な走行部12と、クレーン本体11または走行部12の一方に、他方に対して走行方向と直交する横行方向に転動可能に設けられ、クレーン本体11を鉛直方向に支持する荷重支持ローラ36と、クレーン本体11と走行部12との間に設けられ、横行方向に復元力を作用するコイルスプリング及び横行方向に減衰力を作用するオイルダンパを有する復元・減衰機構39とを備えるものである。
(もっと読む)
クレーン、その免震方法、及びクレーンの横行体の制御方法

【課題】地震の発生時に、重心を安定する位置に確保し、走行装置の脱輪、及びクレーンの倒壊を防止することができるクレーン、その免震方法、及びクレーンのトロリーの制御方法を提供する。
【解決手段】荷役作業中の地震の発生時に、トロリー12を重心安定停止位置P1へ横行させて、免震クレーン1の重心g1を海側脚2と陸側脚3の略中間の位置に確保し、また、休業時にトロリー12の係留位置P3を重心安定停止位置P3にして、予めクレーン1の重心g3を海側脚2と陸側脚3の略中間の位置に確保しておくように構成する。
(もっと読む)
岸壁クレーン及びその制御方法
【課題】
大規模地震に対応した免震構造及び制振構造を有するクレーンを提供する。つまり、あらゆる地震動の周期特性に対して免震及び制振することのできるクレーンを提供する。
【解決手段】
脚構造物3と走行装置2を有する岸壁クレーン1において、前記岸壁クレーン1が少なくとも、振動解析用モデルにおいて質点と見なせる第1質量体及び第2質量体を有し、地表面5と前記第1質量体の間に第1免震装置11を設置し、前記第1質量体と前記第2質量体の間に第2免震装置12を設置する。
(もっと読む)
荷役用クレーンの走行制御装置
【課題】この発明は、荷役用クレーンの走行開始時に、走行方向への風荷重によってコンテナクレーンが押し流されることを防止することを目的とする。
【解決手段】荷役用クレーンの走行方向への駆動力を供給する走行モータを備え、荷役用クレーンの走行停止時に、走行方向の風速に応じて走行モータのトルクを制御し、荷役用クレーンを零速度状態とする。零速度状態における走行方向の風速と走行モータのトルクとを入力パラメータとして、走行方向の風速と走行モータのトルクとコンテナクレーン係数と間に成立する関係式から、コンテナクレーン係数を算出する。荷役用クレーンの走行開始直前において、走行開始直前の走行方向の風速とコンテナクレーン係数とを入力パラメータとして上述の関係式から起動トルクを算出する。ブレーキを閉めた状態において、起動トルクが確立したことを確認しブレーキを開放する。
(もっと読む)
荷役時間を短縮する港湾荷役機器の制御方法と港湾荷役機器
【課題】消費電力する電力量を変えずに、荷役時間を短縮する港湾荷役機器の制御方法と港湾荷役機器を提供する。
【解決手段】コンテナを、コンテナの巻上げ下げ開始から基準速度V0まで、コンテナの荷重に係わらず、定トルク領域A2の最大トルクである第1最大トルクTmによる一定の第1加速度で巻上げ下げし、基準速度V0から荷重から算出される最大速度Vmaxまで、定出力領域A2で定められる速度に反比例する最大トルクである第2最大トルクTvと保持用トルクTwとの差分である第2トルクを、予め定めた一定時間毎に算出し、算出した第2トルクにより一定時間毎に可変する第2加速度で巻上げ下げするようにクレーンのモータを制御する。
(もっと読む)
クレーン
【課題】
大規模地震動に対応した大きなスライド距離を得ることができる免震構造を有する経済的なクレーンを提供する。
【解決手段】
走行装置4と、走行装置4の上部に固定し且つ走行方向yに延伸したシルビーム5を有するクレーン1において、走行装置4とシルビーム5の間に免震ユニット2を設置し、免震ユニット2が、走行装置4の上部に突設した2本の走行装置側アーム10と、走行装置側アーム10からそれぞれ懸吊した2つのリンク部材11と、シルビーム5に固定した2つのシルビーム側アーム12を有しており、リンク部材11の上部を走行装置側アーム10に傾動自在に連結し、リンク部材11の下部をシルビーム側アーム12に傾動自在に連結し、走行装置側アーム10がシルビーム5を懸吊する。
(もっと読む)
荷役システム
【課題】設備費用を抑えかつ作業の迅速性を考慮しつつ省エネルギー化を図ること。
【解決手段】制御装置16の判定部161bが、荷役計画情報に基づき、管理装置30から指示された荷役作業が迅速性を要しない作業であるか否かを判定し、動作制御部161cが、荷役作業が迅速性を要しない作業であると判定部161bによって判定された場合に、ヤードクレーン1a,1bが協働して力行動作および回生動作を行うように各ヤードクレーン1a,1bの動作を制御する。
(もっと読む)
クレーン装置
【課題】バースバーとの距離をレーザ距離センサで正確に検出する。
【解決手段】コンテナヤード内のレーンに沿って延設されたバスバー8からの給電電力で電動機30,31,32を駆動することにより、コンテナヤード内の任意のレーンでコンテナの巻上げ下げを行う門型のクレーン装置であって、バスバー8に立設されて反射面に防食塗装が施された帯板状の反射板8Bに対し、レーザ光L1を出射してその反射光L2を受光することにより、反射板8Bまでの距離を検出するレーザ距離センサ2Sを備え、レーザ距離センサ2Sからレーザ光L1を出射する方向を、反射面と垂直な方向に対して角度を有し、かつ反射光L2の一部をレーザ距離センサ2Sで受光しうる方向とする。
(もっと読む)
コンテナターミナル
【課題】
大規模地震(例えばレベル2地震動)が発生した場合であっても、岸壁クレーンの転倒事故、走行輪の浮き上がり及び破壊事故を防止し、且つ、復旧作業を容易に行うことのできるコンテナターミナルを提供する。
【解決手段】
岸壁クレーン2と、岸壁30を有するコンテナターミナル1において、岸壁クレーン2が、脚構造物5と、脚構造物5から海側又は陸側にそれぞれ立設した複数のアーム3を有しており、岸壁30が、岸壁クレーン2の海側又は陸側で、且つ岸壁クレーン2の走行方向yにそれぞれ延設した水平部材31を備えたガイド4を有しており、地震発生時に、岸壁クレーン2のアーム3が、ガイド4の水平部材31と接触して岸壁クレーン2を支持するように構成した。
(もっと読む)
クレーンの制御方法
【課題】スプレッダを巻下ろしてコンテナに接近させる際に、スプレッダとコンテナの衝突を防止し、且つ、短時間でスプレッダとコンテナの接触を実現したクレーンの制御方法を提供する。
【解決手段】主巻ワイヤロープに吊られたスプレッダと、スプレッダと海上用輸送コンテナの間の距離を計測する距離計測センサを有するクレーン1の制御方法において、センサでスプレッダとコンテナ間の距離Lxを計測する距離計測ステップと、距離Lx及びスプレッダのブレーキ時の加速度から上限速度Vxを算出する算出ステップと、スプレッダ7の移動速度を上限速度Vxに制御する減速ステップを有する。
(もっと読む)
コンテナクレーン
【課題】走行方向及び海陸方向の免震力を発揮するコンテナクレーン。
【解決手段】コンテナクレーンにおいて、クレーン本体4と走行装置11,12の間に積層ゴム21を設ける一方、前記走行装置11,12を構成している主イコライザ17と中間イコライザ18の間に積層ゴム21を設け、かつ、何れか一方の積層ゴム21をクレーン本体4の走行方向yに配した把持部材22,22によって把持し、他方の積層ゴム21をクレーン本体4の走行方向11,12と交差する海陸方向Xに配した把持部材22,22によって把持する。
(もっと読む)
クレーンの制御方法及びその制御装置
【課題】
クレーンによるコンテナの荷役の際に、主巻ワイヤロープにコンテナの荷重がかかる瞬間に発生するロープの跳ね上げを抑制し、機械室等への損傷を低減し、かつ、荷役速度が上昇するクレーンの制御方法及びその制御装置を提供する。
【解決手段】
主巻ワイヤロープ10を、スプレッダ7に設置した速度制限手段13の作用により制限されている制限速度で巻き取り、コンテナ4を荷揚げするクレーン1の制御方法において、コンテナ4の荷揚げ作業が、主巻ワイヤロープ10のたるみを、制限速度V0より速い第1速度V1で巻き取るたるみ取り工程と、主巻ワイヤロープ10を制限速度V0より遅い第2速度V2で巻き取るロープ緊張工程を有する。
(もっと読む)
コンテナクレーン
【課題】コンテナクレーンのブームを立ち上げて休止している時(ブームアップ時)の車輪の浮き上がりを防止する。
【解決手段】コンテナクレーン1の走行装置11,12にアンカー17を設け、該アンカー17が、前記走行装置11,12に昇降可能に設けた棒状体18と、該棒状体18に設けられ、かつ、コンテナヤードFに設けた縦穴21の上端開口部22に設けた張出部23と係合する係止部19とから形成されている。
(もっと読む)
コンテナターミナル
【課題】大規模地震(例えばレベル2地震動)が発生した場合であっても、岸壁クレーンの転倒事故を防止し、且つ、復旧作業を容易に行うことのできるコンテナターミナルを提供する。
【解決手段】岸壁クレーンと、岸壁30を有するコンテナターミナルTにおいて、岸壁クレーンが、走行装置2と、走行装置2に設置した走行輪3を有しており、岸壁30が、走行輪3を誘導して且つ岸壁クレーンの走行方向に形成した走行溝4を有しており、走行溝4が、走行輪3と接触する底部5と、底部5から岸壁表面7にかけて形成した傾斜部6を有する。
(もっと読む)
岸壁クレーン
【課題】
地震発生時に逸走防止装置が解除され、クレーン1が走行方向yに摺動又は走行できるように構成した解除機能付逸走防止装置を有するクレーンを提供する。
【解決手段】
嵌入溝12に嵌入するアンカー11を含む逸走防止装置を有するクレーンにおいて、クレーン1が解除機能付逸走防止装置10を有しており、解除機能付逸走防止装置10が、アンカー11の一端に連結してアンカー11を懸吊するアンカー連結部材13と、アンカー11の水平方向の移動を拘束するアンカーホルダ8を有しており、地震発生時に、アンカー連結部材13によるアンカー11の懸吊が解除され、アンカー11が自重で嵌入溝12内に落下し、アンカー11の上端部がアンカーホルダ8の下端部よりも低い位置となる構成を有する。
(もっと読む)
岸壁クレーン
【課題】地震発生時に、走行装置の走行輪の浮き上がりを防止することができる岸壁クレーンを提供する。また、耐震性能を向上した岸壁クレーンを提供する。
【解決手段】走行装置2と脚構造物3を有した岸壁クレーン1において、脚構造物3が、海側脚32と陸側脚33を連結する水平材7と、水平材7の下面に沿って摺動可能に設置した複数のスライダ機構8と、複数のスライダ機構8にそれぞれ設置した海側揺脚4及び陸側揺脚5を有し、地震発生時に、スライダ機構8が水平材7に対して摺動自在となる制御を行う構成を有している。
(もっと読む)
岸壁クレーン
【課題】免震装置を有する岸壁クレーンにおいて、大規模地震に対応できる岸壁クレーンを提供する。特に、スライド長さが±1000mm以上の免震装置を有した岸壁クレーンを提供する。
【解決手段】免震装置を有する岸壁クレーンにおいて、免震装置2が、底板4と、天板5と、底板4と天板5の間に配置した複数の転動体3と、それぞれの転動体3の位置を予め定めた範囲内で拘束し且つ回転可能に保持するリテーナと、底板4と天板5の相対位置を固定する固定装置を有し、底板4が下方に凸となる曲面状の底板接触面6を有し、天板5が下方に凸となる曲面状の天板接触面7を有しており、転動体3が、略球状又は角を滑らかに形成した略円柱状であり、通常時に、複数の転動体3が天板5を支持し、地震発生時に、固定装置を解除して免震装置2を作動させ、転動体3が底板4上を転動及び摺動し、天板5が転動体3上を摺動する。
(もっと読む)
荷役用クレーンの走行位置制御装置
【課題】荷役用クレーンの走行位置をコンテナに的確且つ速やかに一致させると共に、手間やコスト増を抑制するる。
【解決手段】走行レール上を走行し、その走行方向に隙間を空けて並べられた複数コンテナ3のうち対象コンテナの中心位置に、走行位置を合わせてコンテナを荷役する荷役用クレーンの走行位置制御装置において、走行方向について荷役用クレーンと同期して移動し、走査角度範囲内16に複数コンテナ3が含まれるように取り付けられ、走査角度ごとにコンテナ表面までの距離を計測する走査型の距離計10を備える。計測された距離とその走査角度18とを関連付けた測定データを記憶する。記憶された複数の測定データに基づいて対象コンテナの中心位置と荷役用クレーンの位置との走行方向に関する相対距離を算出する。相対距離を零に近づけるように荷役用クレーンを走行させる。
(もっと読む)
振れ検出装置、振れ検出方法、及びクレーン
【課題】簡易な構成で吊荷の振れ変位量を正確に検出することができる振れ検出装置、振れ検出方法、及びクレーンを得ることを目的とする。
【解決手段】トロリに設けられたセンサによりコンテナを把持するスプレッダに設けられたレーザ光源の位置を検知することで吊荷の振れ変位量が検出される。そして、オフセット誤差導出部64が、吊荷の振れ角度、トロリの速度の微分値、及び振れ変位量の2階微分値に基づいてオフセット誤差を導出し、減算部66が、オフセット誤差を検出した振れ変位量から減算することで、オフセット誤差を検出した振れ変位量から除去する。
(もっと読む)
クレーン制御装置、及びクレーン装置
【課題】クレーン装置におけるエンジンの燃費の改善を図る。
【解決手段】運転モードを、バッテリ52から負荷30及び40に電力を供給する運転モードA、負荷30から回生される回生電力によりバッテリ52を充電する運転モードB、エンジン発電機21及びバッテリ52から負荷30及び40に電力を供給する運転モードC、エンジン発電機21からバッテリ52を充電する運転モードDを切り替える。そして、運転モードCでは、バッテリ52からの放電電流と、エンジン発電機21からの発電電流とを負荷30及び40に対して供給する。また、運転モードAから運転モードCに移行する際には、負荷の増大に先立って、バッテリ充電率SOCと負荷30及び40の大きさに応じた、バッテリ52の放電電流と、エンジン発電機21の発電機電流とによる給電収支(例えば、バッテリ52とエンジン発電機21の負荷分担比率)を予め設定しておく。
(もっと読む)
1 - 20 / 72
[ Back to top ]