
Fターム[3F204DC06]の内容
クレーンの細部(制御、安全) (2,955) | 位置検出器の種類 (130) | 光学的 (58)
Fターム[3F204DC06]の下位に属するFターム
Fターム[3F204DC06]に分類される特許
1 - 20 / 24
吊荷周辺の物体の高さ情報通知システム
クレーンの制御方法
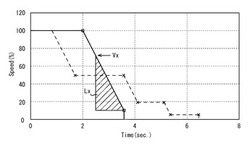
【課題】スプレッダを巻下ろしてコンテナに接近させる際に、スプレッダとコンテナの衝突を防止し、且つ、短時間でスプレッダとコンテナの接触を実現したクレーンの制御方法を提供する。
【解決手段】主巻ワイヤロープに吊られたスプレッダと、スプレッダと海上用輸送コンテナの間の距離を計測する距離計測センサを有するクレーン1の制御方法において、センサでスプレッダとコンテナ間の距離Lxを計測する距離計測ステップと、距離Lx及びスプレッダのブレーキ時の加速度から上限速度Vxを算出する算出ステップと、スプレッダ7の移動速度を上限速度Vxに制御する減速ステップを有する。
(もっと読む)
グラブバケット式アンローダのバラ物陸揚げ方法

【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時は、横行方向前方の巻上げロープの巻き込みと横行方向後方の巻上げロープの繰り出しを同期させ、且つ横行方向後方の巻上げロープの繰り出しを遅らせることによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出すことによりグラブバケット53を前方へ振り出させるようにし、バラ物を掴んだグラブバケット53は、前方への振り出しと同時に開放を行ってバラ物をホッパ10内へ投入する。
(もっと読む)
ロープトロリ式アンローダのバケット位置決め方法
【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時には横行方向後方の巻上げロープを巻き込むことによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出してグラブバケット53をトロリ7が走行して来た方向の前方へ振り出させて槽8'内へ着地させることにより、槽口9直下よりも前後外側奥部のバラ物80を陸揚げ可能にした。
(もっと読む)
荷役用クレーンの走行位置制御装置
【課題】荷役用クレーンの走行位置をコンテナに的確且つ速やかに一致させると共に、手間やコスト増を抑制するる。
【解決手段】走行レール上を走行し、その走行方向に隙間を空けて並べられた複数コンテナ3のうち対象コンテナの中心位置に、走行位置を合わせてコンテナを荷役する荷役用クレーンの走行位置制御装置において、走行方向について荷役用クレーンと同期して移動し、走査角度範囲内16に複数コンテナ3が含まれるように取り付けられ、走査角度ごとにコンテナ表面までの距離を計測する走査型の距離計10を備える。計測された距離とその走査角度18とを関連付けた測定データを記憶する。記憶された複数の測定データに基づいて対象コンテナの中心位置と荷役用クレーンの位置との走行方向に関する相対距離を算出する。相対距離を零に近づけるように荷役用クレーンを走行させる。
(もっと読む)
移載システム
【課題】横移載時にも被搬送物を載置台の所定位置に移載する。
【解決手段】移載システム(100)は、天井に敷設された軌道(1)に沿って走行しつつ被搬送物(3)を搬送する搬送車(2)と、軌道より下方に設けられる載置台(4)との間で被搬送物が横移載方式で移載可能である。移載システムは、(i)搬送車に把持される被搬送物を載置台の所定位置に載置する載置動作を行う際の被搬送物の移載位置を表す載置位置情報、及び(ii)載置台上の被搬送物を搬送車が把持する把持動作を行う際の被搬送物の移載位置を表す把持位置情報を記憶する記憶手段(101)と、載置動作を行う場合、載置位置情報の移載位置で移載が行われるように、他方、把持動作を行う場合、把持位置情報の移載位置で移載が行われるように搬送車を制御する制御手段(102)とを備える。
(もっと読む)
クレーンの振れ止め制御装置
【課題】二重振り子構造、単振り子構造を含むクレーン搬送システムにおいて、速度パターンを持たずに、吊り荷の振れ止めを高精度に実現可能としたクレーンの振れ止め制御装置を提供する。
【解決手段】吊り荷及びその支持構造が単振り子構造または多重振り子構造を構成し、クレーン本体の台車を駆動して吊り荷を目標位置まで搬送するクレーン搬送システムにおいて、吊り荷503の振動による振れ角度を検出する振れ角センサ512と、吊り荷の速度検出値及び位置検出値をフィードバックして吊り荷を目標位置まで搬送するための第1の操作量を演算し、かつ、前記振れ角度を無線通信によりフィードバックして吊り荷の振れ止めを行うための第2の操作量を演算する演算制御手段としてのアシスト制御部101と、第1の操作量及び第2の操作量を加算して前記台車に与える手段と、を備える。
(もっと読む)
画像生成システム
【課題】フックの周辺を鉛直斜め上方から見下ろしながらクレーンを操作する操作者に対して有益な画像情報を提示できる画像生成システムを提供すること。
【解決手段】画像生成システムは、天井クレーンに取り付けられて隣の天井クレーンを撮像するカメラであり、天井クレーンの走行方向に平行に延びる光軸を有するカメラと、その光軸に平行な方向に天井クレーンと共に移動するマークに含まれる対象点のその光軸に垂直な平面におけるその光軸までの固定距離と、天井クレーンから天井クレーンまでのクレーン間距離が所定値となるときにカメラが撮像する画像におけるその固定距離の画像上の大きさとに基づいて、カメラが撮像した画像上に複数のクレーン間距離を示す目盛りを描画する目盛り描画手段とを備える。
(もっと読む)
スラブ搬送装置
【課題】熱間圧延スラブをクレーンで搬送するスラブ搬送装置として、熱間圧延スラブの垂れによる他の設備との接触を適切に防止することができるスラブ搬送装置を提供する。
【解決手段】熱間圧延スラブ2をクレーン10で搬送するスラブ搬送装置であって、搬送する熱間圧延スラブ2の垂れを検知する垂れ検知センサー11を備えている。
(もっと読む)
コイル吊り上げ方法及びリフター
【課題】運転室でクレーン操作を行う作業者が、自ら目視によりクレーン装置を操作してコイルを吊り上げて移動させる際に、コイルと作業者との距離や、作業者の技能等に関わりなく、短時間で確実にコイルを垂直上方向に吊り上げる技術を提供すること。
【解決手段】コイル支持用アーム部を備えたリフターを、作業者の目視により操作してコイルを吊り上げるコイル吊り上げ方法であって、リフターの所定位置に固定されたレーザー光線発生手段から照射されるレーザー光線を、作業者の目視によりコイルの所定位置に導くことにより、コイルとリフターを位置合わせした上でコイル支持用アーム部でコイルを把持する。
(もっと読む)
スタッカクレーンの制振方法
【課題】製造コストの上昇を招くことなく、発生する昇降台の自由振動の振幅を小さくして、作業効率を向上させるスタッカクレーンの制振方法を提供する。
【解決手段】増速領域、等速領域、及び減速領域を備えた速度パターンで走行レール11上を往復走行可能な走行台車12と、これに立設された昇降マスト13と、搬送物13aを搭載し昇降マスト13に沿って昇降する昇降台14を有するスタッカクレーン10の制振方法であって、昇降台14及び搬送物13aの重量と昇降台14の高さ位置に基づいて、スタッカクレーン10の固有振動周期を予め求め、この2倍以上の整数倍の時間に増速領域及び減速領域の時間を設定し、増速領域及び減速領域の各加速度パターンを、左右対称の増加及び減少加速度と負の増加及び負の減少加速度として、搬送物13aを搭載した昇降台14の増速領域及び減速領域の終了後に発生する自由振動の振幅を小さくする。
(もっと読む)
搬送走行車
【課題】機械の構造的変更や部材の個体差がある場合においても、昇降量の精度を維持することが可能な搬送走行車を提供する。
【解決手段】天井走行車5は、所定の領域にFOUP4を搬送するものであって、走行部と保持部60と昇降部61とを備えている。走行部は、レール3に沿って走行する。保持部60は、FOUP4を保持する。昇降部61は、保持部60を吊り下げるベルト59を含む。昇降部61は、走行部に搭載され、保持部60を昇降させる。ベルト59は目盛りを有する。昇降部61は、ベルト59の目盛りに基づいて保持部60の昇降位置を測定する。
(もっと読む)
スラブベンディングに応じるクレーンのトング位置制御装置及びその方法
スラブベンディングに応じるクレーンのトング位置制御装置を開示する。側面感知手段(20)は、スラブ(S)の側面を把持するクレーン(10)のトング(11)に設置され、前記スラブ(S)のベンディングにより生ずる空隙を検出する。距離感知手段(30)は、前記スラブ(S)と前記クレーン(10)間の距離を感知する。前記制御部(40)は、前記スラブ(S)のベンディングによる空隙情報を用いて前記トング(11)の最終グリップ位置を調節する。前記空隙情報は、前記側面感知手段(20)及び前記距離感知手段(30)によって検出される。  (もっと読む)
(もっと読む)
クレーン制御システム装置
【課題】 中抜き、中落し時に吊具もしくは吊具に保持されたコンテナと既存に積まれているコンテナとの衝突を防止または回避することができるクレーン制御システム装置を提供する。
【解決手段】 トロリーに設置されるものであって、あるコンテナの積み上げ/積み下ろしする位置に隣接する他のコンテナと前記あるコンテナとの空隙の中心の鉛直上方に配置された複数個の検出器(20A,20B)と、前記検出器が走査し検出する前記空隙方向の距離を演算し、前記あるコンテナと前記他のコンテナとの衝突を前記距離と規定値との比較に基づいて判断する第1の演算処理部(30)と、前記演算処理部(30)において衝突が判断された場合、クレーンの巻上または巻下速度を制限する第2の演算処理部(31)と、を備えた。
(もっと読む)
レーザーポインタを用いた天井クレーンによる搬送方法及び天井クレーンシステム
【課題】レーザーポインタにより指示された3次元空間における目標搬送位置へ搬送物を搬送する方法及び天井クレーンを提供する。
【解決手段】コントローラを介して自動運転される天井クレーンを用いて搬送物を搬送開始位置から目標搬送位置の真上までの3次元空間における搬送径路に沿って自動的に搬送する方法であって:スポット光を撮像するための複数のカメラを設置し;レーザーポインタによりレーザー光線を目標搬送位置床表面に照射してスポット光を生成し;該生成されたスポット光を少なくとも1台のカメラで撮像し、該撮像データを利用してスポット光重心位置の3次元空間座標を決定し;前記3次元空間座標を前記目標搬送位置データとして利用して前記コントローラによって前記搬送径路を決定し、該搬送径路に沿って前記搬送物を前記搬送開始位置から前記目標搬送位置の真上まで自動的に搬送する;ことを含む自動搬送方法。
(もっと読む)
位置決め制御装置
【課題】エンコーダのプリセットに要する時間を大幅に短縮することができ、位置決めデータの記憶容量が制限されることが無い位置決め制御装置を提供する。
【解決手段】本発明にかかる位置決め制御装置20は、移動体を駆動するサーボモータ13と、サーボモータ13の回転量を検出するインクリメンタル型のエンコーダ21と、位置決め制御信号とエンコーダ21からの検出信号を受けてサーボモータ13を駆動制御するサーボドライバ22と、直線軌道における移動体の位置を計測するレーザ距離計23と、移動体の位置決めデータを記憶していてサーボドライバ22に位置決め制御信号を出力する制御装置16と、を備え、制御装置16は、電源投入後、移動体の位置決め制御動作に先立って、レーザ距離計23からの計測データを用いてエンコーダ21をプリセットする。
(もっと読む)
スプレッダの衝突防止装置
【課題】2台のスプレッダを操作して、コンテナヤードに混在する40ft型コンテナと20ft型コンテナを同時に取り扱うという作業において、スプレッダによるコンテナの誤吊り上げや衝突事故を防止するとともに、作業の効率化を図る。
【解決手段】スプレッダの本体フレーム10の底面に、横行方向の中心軸上に所定の間隔をおいて第1超音波センサー群20と、走行方向の中心軸上に所定の間隔をおいて第2の超音波センサー群21とを配置して、第1超音波センサー群20の検出信号に応じてスプレッダの巻き下げ速度を制御し、第2超音波センサー群21の検出信号に応じてコンテナの種類を識別する。
(もっと読む)
ツインスプレッダの位置検出装置
【課題】ツインスプレッダを用いたコンテナの取り扱い作業において、コンテナの位置を正確に検知する装置を提供する。
【解決手段】ツインスプレッダを構成する2台のスプレッダのそれぞれにおいて、四隅に第1の非接触式センサーを、長手方向の中心線上の両端部に第2の非接触式センサーを、それぞれ下向きに設置し、それらの非接触式センサーを扇形に組み付けられた3台の一次元レーザセンサーで構成する。
(もっと読む)
クレーンの積み降ろし位置決定方法およびその装置
【課題】クレーンで吊り上げた被搬送物を地上運搬車の荷台に精度よく積載するための積み降ろし位置決定方法と積み降ろし位置決定装置を提供する。
【解決手段】クレーンで吊り上げた被搬送物を停車した地上運搬車の荷台に積み降ろすに際し、地上運搬車の停車位置の後方に設置した距離センサーで荷台後部の左右両幅端部の位置を測定し、該両幅端部の位置から荷台の幅方向の中心を求め、この中心と吊り上げた被搬送物の幅方向中心とが一致するようクレーンを移動させ、その後、被搬送物を荷台上に積み降ろすことを特徴とするクレーンの積み降ろし位置決定方法。
(もっと読む)
ごみ処理工場用自動クレーンの制御装置
【課題】ごみピット内に投入されるごみを、そのごみ質を色調にて捉えてクレーンを制御することにより、ごみ質の均一化を図ることができるようにしたごみ処理工場用自動クレーンの制御装置を提供すること。
【解決手段】2台一対のカメラ2a、2bのステレオ視による視差を利用してごみピットP内に堆積したごみ高さを計測するごみ高さ計測手段と、ごみ高さ計測手段により計測されたごみ高さの情報をごみ高さマップとして記憶するごみ高さ記憶手段と、ごみ高さの情報よりごみの色調を判別して記憶するごみ色調記憶手段とを備え、ごみ色調マップに基づいてごみピットP内の異質ごみGaを特定し、異質ごみGaを攪拌するようにクレーン1を制御する。
(もっと読む)
1 - 20 / 24
[ Back to top ]