
Fターム[3G093AA03]の内容
車両用機関又は特定用途機関の制御 (95,902) | 機関の用途 (9,333) | 車両用 (7,853) | 四輪駆動車 (76)
Fターム[3G093AA03]に分類される特許
21 - 40 / 76
車両運転支援装置及び車両運転支援方法
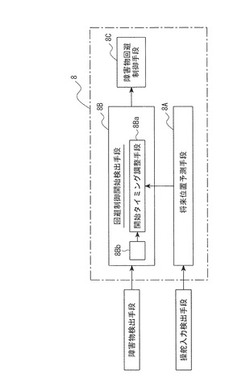
【課題】運転者に違和感を与える制御を低減しつつ、側方障害物に対する支援制御を適切に行うことが可能な車両運転支援を提供する。
【解決手段】自車両の側方に存在する障害物を検出すると、所定時間後の自車両の将来位置を予測する。また、その予測した自車両の将来位置に基づき障害物に対するリスク度合いを算出する。そして、その算出した障害物に対するリスク度合いに応じて、障害物への接近を防止するように自車両を制御する。ただし、運転者の前記障害物と反対側の隣接車線への車線変更の意思を検出した場合には、障害物への接近を防止する制御を抑制する。
(もっと読む)
内燃機関の始動装置

【課題】内燃機関の始動装置において、内燃機関の停止途中であっても速やかに再始動ができる技術を提供する。
【解決手段】内燃機関のクランクシャフトと連動して回転するリングギアと、リングギアに噛み合うピニオンを有するスタータモータと、内燃機関を停止させるときであって機関回転数が変動しつつ下降している最中において、該機関回転数が該機関回転数の平均値以下のときにはピニオンをリングギアに噛み込ませることを許可し、該機関回転数が平均値よりも高いときにはピニオンをリングギアに噛み込ませることを禁止するピニオン制御装置と、を備える。
(もっと読む)
車両の駆動力制御装置
【課題】適正且つ効率的に駆動力を制御する車両の駆動力制御装置を提供する。
【解決手段】転倒検出手段の出力信号が所定時間連続して検出された場合に車両が転倒状態であると判定する転倒判別手段と、転倒検出手段の出力信号が所定時間に所定回数断続して検出された場合に車両が悪路走行状態であると判定する悪路判別手段と、を有する。悪路判別手段が悪路走行状態であると判定した時、エンジン制御手段がエンジン出力を所定の割合低下させる。
(もっと読む)
車両の駆動力制御装置
【課題】サイドブレーキやパーキングブレーキの操作を解除したときに、車両が後方にずり下がってしまうのを防止しつつ、モータの三相のうちの一相に電流が集中するのを防止する。
【解決手段】車両の駆動力制御装置は、インバータ9を制御する4WDコントローラ24と、サイドブレーキ51及びパーキングブレーキ52のオン及びオフ状態を検出するブレーキ操作検出部53と、電動モータ3と後輪1RL,1RRとの間を接続及び遮断する電磁クラッチ11とを備える。4WDコントローラ24は、サイドブレーキ51又はパーキングブレーキ52がオン状態であり、かつ電磁クラッチ11が接続状態にある場合、インバータ9を三相短絡にする。
(もっと読む)
車両用駆動制御装置
【課題】エンジントルクを主駆動輪側及び電気変換部への配分を最適化する。
【解決手段】前輪を駆動するエンジン2と、エンジン2から入力するトルクで駆動される発電機7と、発電機7の電力で駆動されて後輪を駆動するモータ4と、を備え、トルクコンバータ51を介してエンジン2から前輪にトルクを伝達する車両において、電気変換トルク比がトルクコンバータ51のトルク比以上であると判定したときに、モータトルク指令を出力する。つまり、電気変換部がトルクコンバータよりもエンジントルクを大きく増幅するときに、モータトルク指令を出力する。これにより、同じエンジントルクから大きなトルクを発生させることができ、またエンジントルクを低減できるので低燃費化が可能である。
(もっと読む)
車両の電力制御装置
【課題】例えば、車両が障害物を緊急に回避する緊急回避時に生じる各種アクチュエータにおける電力不足を解消する。
【解決手段】緊急回避時に各アクチュエータで必要となる電力を賄えるように、オルタネータが発電する発電量(Pg)の上限値である発電量Pg1より大きい目標発電量Pg2に発電量の上限値を設定する。オルタネータは、車両の緊急回避時において、ECUによる制御下で、目標発電量(Pg2)を上限値として発電量を一時的に増大させる。オルタネータが発電する発電量が増大することによって、オルタネータから各アクチュエータに供給される電力が増大し、各動作部分を動作させるために十分な駆動力を当該動作部分に供給可能なようにアクチュエータを駆動することが可能である。したがって、アクチュエータにおける電力不足が発生することなく、車両は緊急に障害物200を回避することが可能である。
(もっと読む)
車両用運動制御装置
【課題】ドライバに減速感を感じさせることなくアンダーステアを抑制する車両用運動制御装置を提供する。
【解決手段】運動制御装置を、車両の後輪70を駆動するモータ50と、モータに電力を供給する電力供給手段110,120と、車両の旋回時におけるアンダーステアを検出する挙動検出手段100と、ドライバからの加速要求を検出する加速要求検出手段14と、車両がアンダーステアでありかつ加速要求が検出された際に、モータに後輪を駆動させてアンダーステアを抑制する方向のヨーモーメントを発生させる挙動制御手段130とを備える構成とする。
(もっと読む)
車両の制駆動力制御装置
【課題】制動力と駆動力とを自動制御して車両の走行を行う極低速維持制御に対し、オイル温度の上昇に伴う極低速維持制御の強制終了を行うことなく、且つ頻繁な極低速維持スイッチON操作の煩わしさを無くすことができる車両の制駆動力制御装置を提供する。
【解決手段】車両の制動力と駆動力とを同時に自動制御して車両の走行を行うCRAWL走行中に、オイル温度が第1の油温閾値に達した場合には、スロットルバルブ12の開度を小さくし、CRAWL走行を一時的に休止することでオイル温度を低下させる。その後、オイル温度が第2の油温閾値まで低下した時点で、スロットルバルブ12の開度を復帰させ、CRAWL走行を再開させる。これにより、ドライバの操作を必要とすることなく、CRAWL走行の自動再開が可能になる。
(もっと読む)
省燃費運転評価システム
【課題】登坂走行の判定手段を必要とせず、より単純な手順で省燃費運転の評価ができる省燃費運転評価システムを提供する。
【解決手段】計測されたエンジン回転数、アクセル開度、車速、および燃料消費量の各信号を受信してそれらを記録し、かつそれらの信号データを基に演算して運転者への勧告表示を行う記録表示手段(7)とを有しており、その記録表示手段(7)に勧告表示の判断を行うための加速度判定値(A0)を予めを入力しておき、前記信号データから演算した加速度値Aをその加速度判定値(A0)と比較し勧告表示領域にある(A>A0)と判断されれば記録表示手段(7)に勧告表示をする。
(もっと読む)
車両走行制御装置
【課題】自動走行制御を不可能にしてしまうような異常の検知
【解決手段】車両の車速の調整を行うエンジン100を目標制御量に基づいて制御する第1ECU(エンジンECU9)と、車速が目標車速となるように目標制御量を算出して第1ECUへと出力する第2ECU(自動走行制御ECU8)と、を備え、その第1ECUは、エンジン100の回転数又は発生する制御量が所定値を超えた際に目標制御量に基づくエンジン100の制御を禁止させるべき異常状態にあるとの判定を行う異常判定部(システム限界判定部91)を設けること。
(もっと読む)
駆動制御装置
【課題】4WD車におけるファイナルドライブへの高負荷を抑制することの可能な駆動制御装置を提供する。
【解決手段】4WDと2WDとを切り換えるトランスファを備えた車両の駆動制御装置であって、前後輪のファイナルドライブの少なくともいずれか一方の油温を検出し、該検出した油温が高温判定温度α1を越える場合に(S1〜S6)、所定のエンジン制御、好ましくは該エンジン制御による車速制限を実行する(S7)ようにしたことを特徴とする。
(もっと読む)
車両のトランクションコントロール装置
【課題】モータ駆動輪側の出力制限分だけエンジン駆動輪側を出力上昇させる時における、エンジン駆動輪のトランクションコントロール性能が低下するのを防止する。
【解決手段】後輪駆動モータが出力制限中で、それを前輪駆動用エンジンの出力増大で補償する時、前輪速Vwfがトランクションコントロール(TCS)用設定スリップ相当駆動輪速Vwsを越えようとしたら(前輪が加速スリップしそうになったら)、エンジン出力を低下するトランクションコントロールにより当該スリップを防止する。ところでVwsを実線で示す固定値とせず、波線で示すように、モータ出力制限量が大きいほど(エンジン出力増大量が大きいほど)小さくなるよう変更する。よって、出力増大されるエンジンがVwfを図示のごとくVwsに向け急上昇させても、Vwfが変更後のVwsに直ぐに到達してこれを越えることがなく、Vwfを速やかにVwsに収束させ得る。
(もっと読む)
ハイブリッド車両の駆動装置
【課題】燃費向上が可能なハイブリッド車両の駆動装置を提供する。
【解決手段】駆動源としてエンジン10およびモータ20を備えるハイブリッド車両1において、エンジン10およびモータ20と車両1の前輪30との間に配置された遊星歯車機構50と、車両の後輪60とエンジン10との間に配置された変速機構40とを備える。モータ20の出力軸が、遊星歯車機構50のキャリアに連結されることが望ましい。
(もっと読む)
4輪駆動車用加速スリップ検出装置
【課題】 登坂路面等、加速度センサ値の積分によっては適切な車体速を得られない場合であっても、スリップ状態を確実に検出可能な4輪駆動車用加速スリップ検出装置を提供する。
【解決手段】 4輪駆動車用加速スリップ検出装置において、車輪速に基づき車輪加速度を算出する車輪加速度算出手段と、前記車輪加速度が加速スリップ判断閾値を上回った際に車両の加速スリップ状態と判断する加速スリップ判断手段と、前記加速スリップ状態と判断された際に前記車輪加速度が前記スリップ判断閾値を下回り、かつアクセルオフと判断された場合、前記加速スリップ状態の判断を解除する加速スリップ判断解除手段とを有することとした。
(もっと読む)
車両およびその制御方法
【課題】内燃機関の始動時に生じ得る過大な電力による蓄電装置の充電を抑制すると共に内燃機関の始動時に生じ得る駆動力の急変を抑制する。
【解決手段】バッテリの入力制限Winに基づく標準間欠禁止車速Vpr1とシーケンシャルシフトポジションであるときのシーケンシャル間欠禁止車速Vpr2とパワーモードが設定されているときのパワーモード間欠禁止車速Vpr3とのうち最小のものを間欠禁止車速Vprとして設定する(S400〜S480)。そして、車速Vが間欠禁止車速Vpr未満のときにはエンジンの間欠運転を伴ってバッテリの入出力制限Win,Woutの範囲内で駆動軸に要求トルクTr*を出力して走行し、車速Vが間欠禁止車速Vpr以上のときにはエンジンの間欠運転を禁止してバッテリの入出力制限Win,Woutの範囲内で駆動軸に要求トルクTr*を出力して走行する。
(もっと読む)
車両の制振制御を行う駆動制御装置
【課題】 車両のピッチ・バウンス制振制御のための駆動出力制御を実行するガソリンエンジン車の駆動制御装置に於いて、制振制御の実行中に、吸入空気量の変動が制限されることなく、より良好な制振効果が得られるようにすること。
【解決手段】 本発明の駆動制御装置は、車輪トルクに基づいてピッチ・バウンス振動振幅を抑制するようエンジンの駆動トルクを制御する制振制御部と、エンジンのアイドル回転速度を制御するための吸入空気量を制御するアイドル回転速度制御部とを含み、制振制御の実行時にアイドル回転速度制御部が吸入空気量を低減し、制振制御のための吸入空気量の可変範囲を拡大する。
(もっと読む)
自動車の走行性を調整する装置および方法
本発明は、車両、特に自動車の少なくとも一つの車輪の駆動を制御する装置であり、車輪を駆動させるエンジン(50)、エンジン制御手段(40)、車両の運転者が望む加速レベルに関する情報を供給する手段(62)、車両の加速レベルに関する情報を供給する手段(22)、および、種々の情報を受けるコンピューター手段(70)を有する電気制御手段でなる。コンピューター手段(70)は、車両の加速レベルを運転者が望む加速レベルに合うようにしている。この装置は、さらに車両の傾きの情報を供給する手段を有する。 (もっと読む)
四輪駆動車の制御装置
【課題】四輪駆動を維持したまま、四輪駆動車の副駆動輪への駆動力伝達系の自励振動の発生防止又は抑制を図ることができる四輪駆動車の制御装置の提供。
【解決手段】エンジンの駆動力を車輪に伝達する駆動力伝達系の自励振動を制御する四輪駆動車の制御装置であって、自励振動の発生又は発生の予兆を検知する自励振動検知手段1と、自励振動検知手段1によって自励振動の発生又は発生の予兆が検知された場合に、ブレーキペダル操作と独立に、四輪駆動車の主駆動輪及び/又は副駆動輪に所定の制動力を作用させる制動力制御手段2とを備える。
(もっと読む)
車両の安定性を改善するための車両システムの制御方法
車両の安定性を制御する改良方法が、アクティブヨーコントロールシステム、アンチロックブレーキングシステムおよびトラクションコントロールシステムといった車両安定性制御システムの協調動作によって提供される。これらの方法は、路面摩擦係数μ、車輪スリップおよびヨー偏差を含む路面情報の認識を使用する。該方法は、引き続き、必要に応じて、アクティブダンピングシステムの設定及び/又は駆動トルクの配分を修理して、サスペンションにおけるダンピングを増加/低減させ、かつ車輪でのトルク適用をシフトさせ、それにより車両における著しい荷重のシフトを防ぎ、及び/又は車両ドライバビリティおよび快適性を改善する。アクティブダンピングシステムまたはトルク配分の調整は、予め運転者によって選択されたいずれかの特性を一時的にオーバライドする。  (もっと読む)
(もっと読む)
ハイブリッド車両の制御方法
【課題】モータ走行からハイブリッド走行への移動する際のクラッチ締結時の滑りを減少させ、ショックを低減させる。
【解決手段】ハイブリッド車両10は、内燃エンジン12と、エンジン始動用のISGモータ14と、後輪を駆動するメインモータ26と、エンジン出力軸と前輪車軸との間に設けられたCVTプーリーベルト32と、内燃エンジンの出力軸とCVTの入力軸31との間に設けられたクラッチ16と、バッテリ24と、ハイブリッドコントローラ50と、を備える。ハイブリッドコントローラは、メインモータ26のみの車両走行状態からエンジン駆動力を追加するべきと判定したとき、クラッチ16が開放された状態でISGモータ14でエンジン12を始動させ、CVT入力速度が目標締結速度となるようにCVTの変速比を制御し、エンジン速度を検出し、CVT入力速度を検出し、両者の差が所定の範囲内となったとき、クラッチ16を締結させるように各要素を制御する。
(もっと読む)
21 - 40 / 76
[ Back to top ]