
Fターム[3G093DB04]の内容
車両用機関又は特定用途機関の制御 (95,902) | パラメータ、検出(機関以外) (18,896) | 回転数(回転速度) (1,537) | 車輪の回転数(回転速度) (711) | 従動輪の回転数(回転速度) (138)
Fターム[3G093DB04]に分類される特許
121 - 138 / 138
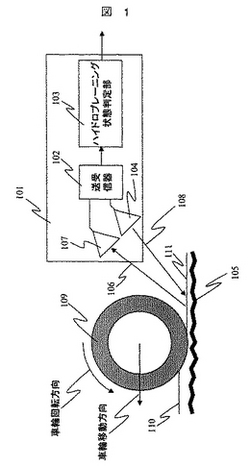
ハイドロプレーニング状態判定装置
【課題】
湿潤路を走行中に車輪と路面との接触が断たれ、ハイドロプレーニングが発生したことを正確に判定する。
【解決手段】
送信波を送信する送信機能と、前記送信機能で送信した送信波の反射波を受信する受信機能と、前記送信機能から送信する送信波を車輪の後ろの路面に送信し、送信波の路面からの反射波を前記受信機能で受信して、ハイドロプレーニングの発生状態を判定するハイドロプレーニング状態判定機能とを備えたことを特徴とするハイドロプレーニング状態判定装置。
(もっと読む)
鞍乗り型輸送機器用操縦制御装置

【課題】スロットルグリップの操作に加え、ライダの体重移動に応じて駆動力を制御することの可能な鞍乗り型車両用操縦制御装置を提供する。
【解決手段】スロットルグリップ回動トルクセンサ11及びスロットルグリップ回動トルク演算部34でスロットルグリップ回動トルク要素TH'を算出し、さらにスロットルグリップ疑似開度演算部36で積分してスロットルグリップ疑似開度要素THを算出する。また、ハンドル荷重センサ12及びハンドル荷重演算部38でハンドル荷重FFを検出するとともに、左右のステップ荷重センサ13,14と左右のステップ荷重演算部40,41で左右のステップ荷重FR,FLを検出し、さらに重心移動要素演算部42で重心移動要素Fを算出する。そして、これらの要素を考慮に入れて目標スロットル開度THtargetを決定し、PID制御によりスロットルバルブを回動させる。
(もっと読む)
自動車の制御装置及び制御方法
【課題】ドライバによって異なる運転状態及び制御機能に対応し、ドライバの意図通りに自動変速機搭載車を運行するパワートレイン制御装置及び制御方法を提供することにある。
【解決手段】現在の走行状態及びドライバ操作量等を検出するための制御用センサ1と、ドライバの意図を把握するためのドライバ意図把握手段2と、複数の運転モードの中から上記把握手段で把握した運転モードを選択する運転モード選択手段3と、前記運転モード選択手段で選択されたモードに応じて複数の制御機能を選択する制御機能選択手段4と、前記制御用センサ1及び制御機能選択手段4の信号を用いて制御用アクチュエータ5の制御量を演算する制御量演算手段6とにより構成される。
(もっと読む)
スリップ防止システム
【課題】 従来のスリップ防止システムでは、スリップが発生した場合にエンジンの出力を制御せずに、単にクラッチ等の伝達機構で車軸への駆動力を調節するものであるので、半クラッチ状態においては、エンジンのエネルギーが無駄に消費される問題がある。
また、対地速度センサを用いてスリップを判断する技術に関しては、車軸等の回転数を計測する回転数センサ以外に当該対地速度センサを設ける必要があり、しかも対地速度センサは高価であるために、作業車両の製造コストが高くなる問題がある。
【解決手段】 制御装置2は、前側左車軸11a等の車軸の回転数センサから各車軸の実回転数を検出し、他方、エンジン回転数センサ6と変速比検出センサ7とから得られる情報で各車軸の推定回転数算出し、実回転数と推定回転数との回転数差が、設定回転数以上である場合にスリップが発生したと判断する。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】電動機が上限回転数を超えて駆動されるのを抑止する。
【解決手段】遊星歯車機構を介してエンジンと第1モータと駆動軸とが接続されると共に駆動軸に第2モータが接続されたハイブリッド車において、燃料タンクに取り付けられた残量計からの燃料残量Fuが所定残量Fref未満となってからの走行距離Lが所定距離Lrefを超えたとき(S130〜S180)、所定トルクTrefを上限としてエンジン22から出力するトルクを制限すると共に(S190,S200)、要求トルクTr*が駆動軸に出力されるようエンジンと二つのモータを制御する。これにより、燃料切れ直前に一時的に遮断された燃料供給が回復したときにエンジントルクが急増するのを抑制でき、第1モータが上限回転数を超えて駆動されるのを抑止できる。
(もっと読む)
車両の出力特性制御装置
【課題】摩擦係数が低い路面からスムースに発進する車両の駆動力制御装置を提供する。
【解決手段】エンジンと、アンチロックブレーキシステムと、アクセルの踏み込み量を検出するアクセル踏込量検出手段と、前記アクセル踏み込み量に応じて目標駆動力を設定し、この目標駆動力となるように前記エンジンの出力応答特性を制御する出力応答特性制御手段(41)と、前記アンチロックブレーキシステム作動時に車両走行路面の摩擦係数を算出する路面摩擦係数演算手段(30)と、算出された摩擦係数に応じて前記出力応答特性を変化させる出力応答特性変更手段(42)とを備えたことを特徴とする車両の出力特性制御装置である。
(もっと読む)
車両の制御装置
【課題】燃料供給を再開する際に実際にロックアップ解除状態になっていない状態でのトルクショックを防止する装置を提供する。
【解決手段】ロックアップ締結信号を受けたときにエンジン(1)と変速機(23)とを直結状態とし、ロックアップ解除信号を受けたときにエンジン(1)と変速機(23)とを非直結状態に戻すロックアップ機構(22)と、ロックアップ領域にあるときにロックアップ締結信号を出力し、ロックアップ領域にないときにロックアップ解除信号を出力する手段(32)とを備える車両の制御装置において、燃料供給カットの指示が出たときにエンジンへの燃料供給をカットする手段(6)と、前記燃料供給カットの指示の後に燃料供給再開の指令が出たときに目標空燃比を一時的にリッチ化する処理を行う手段(6)と、実際にロックアップ解除状態にあるか否かを判定する手段(6)と、この判定結果より実際にロックアップ解除状態にないときには前記一時的なリッチ化処理を禁止する手段(6)とを備える。
(もっと読む)
自動変速機の制御装置
【課題】 傾斜路等におけるアイドルストップ後のエンジン再始動時に、違和感のない発進が可能な自動変速機の制御装置を提供すること。
【解決手段】 アイドルストップ制御を行う自動変速機の制御装置において、駆動輪の回転数相当値を検出する回転数検出手段と、エンジン再始動直後に前記回転数検出手段により検出された回転数が上昇しているかどうかを判断し、上昇しているときは傾斜路と判断し、上昇していないときは平坦路と判断する路面傾斜判断手段と、前記複数のフェーズに応じてエンジンの入力トルクを制限するトルクダウン量をエンジン制御手段に対して出力するトルクダウン制御手段と、前記路面傾斜判断手段により傾斜路と判断されたときは、前記トルクダウン量が大きくなるように補正するトルクダウン量補正手段とを設けた。
(もっと読む)
車両のエンジン始動装置
【課題】 車両の走行中にエンジンを自動停止させて燃費等の向上をはかりつつ、自動変速機をニュートラル状態として逆駆動の影響を確実に抑制し、なおかつ再加速要求に応じてエンジンを自動的に再始動させる際のドライブ状態への切換えを迅速に行わせる。
【解決手段】 ECUは、走行中にドライブ状態からニュートラル状態に切り換えるとともにエンジンを自動停止させ、さらに緩減速時には、エンジン停止後、変速段G101を車速V101に応じて順次低速段側にシフトさせる一方、急減速時には、エンジン停止後、変速段G102をニュートラル状態としつつ、摩擦要素をプリチャージ状態とする。
(もっと読む)
車両の制御装置
【課題】 エンジン自動停止、自動始動が正常でないことを、運転者が容易に認識できるようにする。
【解決手段】 少なくともエンジン2を含む駆動力発生手段と、前記駆動力発生手段で発生させた駆動力を変速して駆動輪Wに伝達する変速機6と、前記駆動力発生手段により駆動され変速機6に油圧を供給するメカニカルオイルポンプ11と、エンジン2の停止時に起動されて変速機6に油圧を供給しエンジン2の始動時に停止する電動オイルポンプ12と、を備え、所定の条件下でエンジン2を自動停止および自動始動する車両1の制御装置において、電動オイルポンプ12が故障か否かを判定する故障判定手段を備え、前記故障判定手段により電動オイルポンプ12が故障であると判定された場合にも、エンジン2の自動停止処理および自動始動処理を実行することを特徴とする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】燃料カットや効率の良い回生を行うハイブリッド車両制御装置提供。
【解決手段】ハイブリッド車制御装置で、アクセル開度又はスロットル開度を含む運動状態にて、内燃機関が駆動力を発生する必要ないか否かの制御判定手段と、スロットル開度と車速にて、自動変速機の変速段選択手段と、制御判定手段により内燃機関が駆動力を発生する必要がないと判定され、且つ変速段選択手段により選択された最終変速段が現在選択されている変速段よりも2段以上高速段であるか否かの2段アップシフト判定手段と、その手段により所定の条件を満足すると判定されたとき、現在から1段ずつ最終変速段まで順次変速制御するとともに、変速段制御に同期及び並行して、半締結状態に一定時間なるようにロックアップクラッチを制御した後に最終変速段の直前から最終変速段への変速に同期して直結状態になるようロックアップクラッチを制御する2段アップシフト制御手段。
(もっと読む)
パワートレインの制御装置
【課題】 無段変速機のステップ変速時における実変速開始時点を精度良く判定する。
【解決手段】 無段変速機の変速比をステップ的に変化させる変速をおこなう際に、変速制御開始前の前記無段変速機の入力回転数に基づいて求められる推定入力回転数と実際の入力回転数との偏差から検出される実際の変速の開始に合わせて、前記無段変速機が連結された内燃機関の出力トルクを増大させるパワートレインの制御装置において、前記変速の内容に基づいて判断しきい値を設定するしきい値設定手段(ステップS6)と、そのしきい値設定手段で設定された前記判断しきい値と前記偏差とを比較して実際の変速の開始を判定する変速開始判定手段(ステップS10)とを備え、その変速開始判定手段で実際の変速の開始が判定された場合に、前記内燃機関の出力トルクを増大させるように構成されていることを特徴としている。
(もっと読む)
車両のモータトラクション制御装置
【課題】 部品保護と加速不良の改善との両立を図ることができる車両のモータトラクション制御装置を提供すること。
【解決手段】 駆動輪を駆動する動力源に装備された少なくとも1つのモータと、駆動輪の駆動スリップを検出し、モータトルクダウン制御により駆動輪のグリップを回復させるモータトラクション制御手段と、を備えた車両のモータトラクション制御装置において、駆動輪のスリップ相当値を検出する駆動輪スリップ相当値検出手段を設け、前記モータトラクション制御手段は、駆動スリップ発生時に路面伝達駆動力を確保するトルクダウン制御を行うドライバビリティ制御部を有し、モータトラクション制御中、駆動輪スリップ相当値が大きい値であるほど、前記ドライバビリティ制御部にて算出されるトルクダウン量を大きくする補正を行う手段とした。
(もっと読む)
車両のモータトラクション制御装置
【課題】 モータトラクション制御時、部品保護とスタビリティの確保との両立を図ることができる車両のモータトラクション制御装置を提供すること。
【解決手段】 駆動輪を駆動する動力源に装備された少なくとも1つのモータと、駆動輪の駆動スリップを検出し、モータトルクダウン制御により駆動輪のグリップを回復させるモータトラクション制御手段と、を備えた車両のモータトラクション制御装置において、前記モータトラクション制御手段には、部品保護のための第1トルクダウン量を演算する部品保護制御部と、車両挙動を安定させるための第2トルクダウン量を演算するスタビリティ制御部と、を有し、前記モータトラクション制御手段は、前記部品保護制御部による第1トルクダウン量と前記スタビリティ制御部による第2トルクダウン量のうち、トルクダウン量が大きい方を制御目標トルクダウン量として選択する手段とした。
(もっと読む)
パワートレインの制御装置
【課題】 イナーシャトルク補正量算出時の演算負荷を低減する。
【解決手段】 無段変速機がステップ変速を行う際に出力トルクを変化させるエンジンが前記無段変速機に連結されているパワートレインの制御装置において、変速中の入力軸回転数変化量と無段変速機の各部材の慣性モーメントとから、変速中のイナーシャトルク補正量の平均値を求めるイナーシャトルク平均補正量算出手段(ステップS15)と前記イナーシャトルク補正量の平均値からスロットル要求開度を算出するスロットル開度算出手段(ステップS17)とを有しており、変速中の入力軸回転数変化量に基づいて、変速中のイナーシャトルク補正量の平均値が求められる。変速中のイナーシャトルク補正量の平均値が求められるので、平滑化処理等を行う必要が無く、電子制御装置の演算の負荷を軽減することができる。
(もっと読む)
車輌の駆動力制御装置
【課題】低速旋回中に前輪がトラクション制御される場合に前輪及び後輪の駆動力を適正に制御することにより、低速旋回中に前輪がトラクション制御される場合の車輌の安定性及び走行性を従来に比して向上させる。
【解決手段】前輪用駆動装置(10)と、後輪用駆動装置(28)と、車輪の駆動スリップ率が過大であるときにはトラクション制御を行うトラクション制御装置(26、36)とを有し、前輪用駆動装置及び後輪用駆動装置の一方を主駆動装置とし他方を副駆動装置とする車輌の駆動力制御装置であって、車輌が低速旋回している状況に於いて前輪についてトラクション制御が実行されるときには(S50、110)、前輪の駆動スリップ状態に応じて前輪用駆動装置の駆動力を低下させると共に、後輪の駆動トルクが前輪の駆動トルクを越えないよう車輌の旋回度合に応じて後輪用駆動装置の駆動力を制御する(S120、150、160)。
(もっと読む)
車両の自動変速装置
【課題】 ダブルクラッチ制御でエンジン回転の上昇が遅いとき、その回転上昇を早め、変速時間の長期化及び変速不能を防止する。
【解決手段】 機械的なシンクロ機構を有しないメインギヤの変速に際し所定のシンクロ制御を実行し、且つ変速機のシフトダウンの際に所定のダブルクラッチ制御を実行するものにあって、ダブルクラッチ制御が、クラッチ断及びギヤ抜き後、エンジン回転を所定の目標エンジン回転まで上昇させてクラッチを接し、目標メインギヤ段におけるドグギヤ回転をスリーブ回転付近まで上昇させる制御を含み、ダブルクラッチ制御の開始から所定時間が経過してもなおエンジン回転が目標エンジン回転に到達しなかったときは、目標エンジン回転を高める制御を行う。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】 パラレルハイブリッド車両において、モータMG2の制御に起因する振動を抑制し、乗り心地を向上する。
【解決手段】 エンジン、モータMG1、モータMG2および車軸をプラネタリギヤを介して結合する。エンジンおよびモータMG1から出力された動力をモータMG2で補償して要求動力を車軸から出力する。この制御では、まず上記補償に必要なトルクをモータMG2の仮目標トルクとして設定する。この仮目標トルクになまし処理を施して目標トルクを決定する。車両の走行状態に応じてなまし処理の程度を変える。停車中にエンジンの始動が開始された場合は、高い応答性でモータMG2を制御して車軸へのトルク変動を適切に相殺する。通常走行中にはやや低い応答性でモータMG2を制御して運転者のアクセル操作に対し滑らかに出力トルクを変える。
(もっと読む)
121 - 138 / 138
[ Back to top ]