
Fターム[3H001AB06]の内容
サーボモータ (417) | 油空圧制御回路の要素(その他) (74) | 流量制御弁(絞り弁) (13)
Fターム[3H001AB06]に分類される特許
1 - 13 / 13
ポジショナ
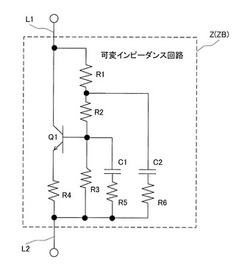
【課題】低周波のノイズの影響に強いポジショナを提供する。
【解決手段】入力ラインL1と出力ラインL2との間に能動負荷Zとして可変インピーダンス回路ZBを設ける。可変インピーダンス回路ZBは、直流の電流信号に対するインピーダンスが低く、交流の電流信号に対するインピーダンスが高いという特性を有し、ラインL1,L2間に接続された抵抗R1とR2とR3との直列回路と、ラインL1にそのコレクタが接続され、そのベースが抵抗R2とR3との接続点に接続されたトランジスタQ1と、トランジスタQ1のエミッタとラインL2との間に接続された抵抗R4と、抵抗R2とR3との接続点にその一端が接続されたコンデンサC1と、コンデンサC1の他端とラインL2との間に接続された抵抗R5と、抵抗R1とR2との接続点にその一端が接続されたコンデンサC2と、コンデンサC2の他端とラインL2との間に接続された抵抗R2とから構成されている。
(もっと読む)
ポジショナ

【課題】基本機能を犠牲にすることなく、確実に、調節弁の開度制御の速応性や整定性などの制御性を向上させる。
【解決手段】供給電流Iが取り得る電流の範囲を複数の電流範囲に区分し、この電流範囲の区分毎に基本機能回路部7が実施する調節弁2の開度制御の制御形態(単ループ制御、二重ループ制御など)を定めたテーブルTB1をメモリ5に格納しておく。CPU4は、供給電流Iの実際値を検出し、基本機能回路部7に振り向けることが可能な余剰電流があるか否かを判断する。この場合、4mAを超える供給電流を余剰電流とみなし、その余剰電流を基本機能回路部7に配分するように、電流調整部8へ指令を送る。また、供給電流Iの区分に応じ、テーブルTB1に定められている制御形態で開度制御を実施するように、基本機能回路部7に指示する。
(もっと読む)
フォークリフト
【課題】車体の地上高さや駆動輪の輪重等を簡単に調整できるようにする。
【解決手段】駆動輪10を上下に揺動するためのドライブシリンダ11と、補助輪20を上下に揺動するためのキャスタシリンダ21と、ドライブシリンダ11の第1室とキャスタシリンダ21の第1室とを接続する第1管路31と、ドライブシリンダ11の第2室とキャスタシリンダ21の第2室とを接続する第2管路32と、作動油ポンプ81と制御弁73,74,75との間を第1管路31に接続する第3管路91と、第3管路91を開閉する切換バルブ90とを備え、制御弁73,74,75は、アンロード状態のときに絞り回路が構成されるようになっており、センサー94の検出結果に基づいて、制御弁73,74,75がアンロード状態のときに、作動油ポンプ81を駆動して切換バルブ90を開く調整動作を行う。
(もっと読む)
デジタル液圧制御装置
本発明は、少なくとも2つのバルブ要素列であり、そのバルブ要素列の一方が供給ラインを制御装置出力に接続可能であり、そのバルブ要素列の他方が該制御装置出力を出口ラインに接続可能であるところの少なくとも2つのバルブ要素列を有するデジタル液圧制御装置に関する。その制御装置において、各バルブ要素列における複数のバルブ要素は、並列に接続され、個別に、或いは、互いに異なる組み合わせで同時に切り換え可能である。1つのバルブ要素列における複数のバルブ要素は、それぞれ異なる流れ断面を有する。本発明によると、最小流れ断面を有するバルブ要素は、バルブ要素列に2つ存在する。さらに、差動シリンダと4つのバルブ要素列を有するデジタル液圧制御装置とを含むシステムユニットが記載される。4つのバルブ要素列のうちの2つは、共通の制御装置出力で、差動シリンダの圧力室の一方に接続され、一方で、他の2つのバルブ要素列は、共通の制御装置出力で、その差動シリンダの圧力室の他方に接続される。2つの圧力室における圧力の独立した調節のおかげで、その差動シリンダは、正確に調節可能なリニアアクチュエータとして使用され得る。 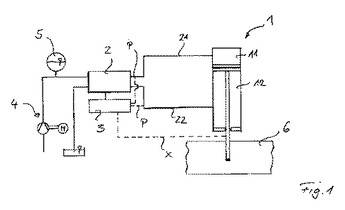 (もっと読む)
(もっと読む)
流量を制御する装置
流量を制御する装置が開示される。本明細書で開示される流量制御装置の例は、第1の端部で弁座、および第2の端部で排気座と動作可能に接続される供給プラグを有する信号段継電器を備える信号段と、シールが、流圧フィードバック力を排気座へ加えるためのフィードバック面積を提供するように、供給プラグと動作可能に連結されるシールと、を含む。 (もっと読む)
アクチュエータおよび制御方法
【課題】非線型特性によるサーボ弁の制御性低下を防止する。
【解決手段】中空のシリンダと、シリンダに収容されて、シリンダと共に一対の圧力室を形成しつつ、シリンダに対して相対移動するピストンと、一対の圧力室の各々を、作動流体の圧力源または排気部に対して連通または遮断させる一対の制御弁と、シリンダに対するピストンの位置を検出する位置検出器と、一対の圧力室の少なくとも一方から作動流体を排気させる排気弁と、位置検出器が検出する位置が所与の目標位置に近づくように、制御弁を制御する制御部とを備える。
(もっと読む)
アクチュエータおよび制御方法
【課題】複動型シリンダを有するアクチュエータの動作を安定させる。
【解決手段】中空のシリンダと、シリンダに収容されて、シリンダと共に一対の圧力室を形成しつつ、シリンダに対して相対移動するピストンと、一対の圧力室の各々を、作動流体の圧力源または排出部に対して連通または遮断させる一対の制御弁と、シリンダに対するピストンの位置を検出する位置検出器と、一対の圧力室の各々における作動流体の圧力を個別に検出する一対の圧力検出器と、位置検出器が検出する位置が所与の目標位置に近づき、且つ、圧力検出器が検出する圧力の平均が所与の目標圧力に近づくように、制御弁を制御する制御部とを備える。
(もっと読む)
弁の不感領域判別方法
本発明は、削岩装置のアクチュエータの制御に用いる比例制御弁(8)の不感領域判別方法であって、制御弁(8)を電気的Pコントローラ(12)で制御し、アクチュエータの動きを表す座標系におけるアクチュエータの位置を別個の位置検出器で測定することを含むものである。不感領域は、制御弁(8)のPコントローラと差分値との積によって判別する。 (もっと読む)
制御弁の制御ループにおける診断を実行する方法および装置
【課題】制御弁用のニューマチック制御ループにおいて診断を実行する方法および装置。
【解決手段】ポジショナ14に通常設けられた圧力センサ85,86,88およびは変位センサ68、84は、制御ループの動作パラメータを検出すべく用いられる。プロセッサは、これらのセンサからのフィードバックを受信し論理サブルーチンに従って故障信号を生成するようにプログラミングされている。この論理サブルーチンは、スプール弁26の流出ポート52,54を通る制御流体の質量流量を計算することと、制御ループ内の漏洩および遮断を検出すべく制御流体の他のパラメータと比較することとを含みうる。故障がいったん検出されると、その故障の根本原因である場所が、故障時点の制御ループの動作パラメータを特徴づけすることにより特定されうる。
(もっと読む)
シリンダ遮断バルブを有する油圧システム
【課題】 油圧システムに関する。
【解決手段】 油圧システムは油圧アクチュエータの近傍にアイソレータを内蔵することにより事故を防止する。アイソレータは油圧アクチュエータに接続された第1ポートと、第1及び第2ポート間に接続された電気動作型遮断バルブを有する第2ポートを有する。圧力リリーフバルブは油圧アクチュエータの圧力があるレベルを超えると圧力を逃がすことにより応答し、遮断バルブが電気の無印加で開口させ、油圧アクチュエータ内の圧力を解放させる。制御バルブアセンブリは油圧アクチュエータから遠隔にあり、流体源と油圧アクチュエータ間の流量を計測するため第2ポートに接続されている。
(もっと読む)
アクチュエータ
【課題】電動又は油圧の何れを用いても可動ロッドを動作させることができる、冗長性を備えたアクチュエータを提供する。
【解決手段】シリンダ21と、このシリンダ21内に配置されるとともに、当該シリンダ21への作動油の給排により移動するピストン22と、このピストン22に連結される可動ロッド23と、この可動ロッド23の内部に少なくとも一部が挿入されるネジ軸29と、このネジ軸29に螺合され、前記ピストン22と一体的に移動可能なナット30と、前記ネジ軸29を正逆いずれにも回転駆動することが可能な電動モータ13と、を備える。
(もっと読む)
圧着装置
【課題】 別途に高速のアクチュエータなどを用いることなく、1つの差圧シリンダにてマシンタクト(作業速度)を高める。
【解決手段】 圧力開放側,加圧側の切換ステージを有する第1電磁切換弁22を含み加圧流体源PSと第1シリンダ室10aとの間を接続する高圧側の第1圧力制御回路20と、圧力開放側,加圧側の切換ステージを有する第2電磁切換弁32を含み加圧流体源PSと第2シリンダ室10bとの間を接続する低圧側の第2圧力制御回路30と、原点位置でピストン11を検出する第1センサS1および原点位置から離れた中間位置でピストン11を検出する第2センサS2とを備え、原点位置から中間位置まての間は第1電磁切換弁22を加圧側ステージ22a,第2電磁切換弁32を圧力開放側ステージ32a側としてピストン11をスムーズに移動させ、中間位置以降は第1,第2電磁切換弁22,32をともに加圧側ステージ22a,32bとして差圧動作状態とする。
(もっと読む)
流体作動式シリンダ用の位置制御システム
位置制御システムを使用して、流体作動式シリンダ12を制御するが、これはハウジング20内に位置して動程の第1端限界22と第2端限界24の間を移動するピストン18によって画定される少なくとも1つの流体チャンバ14を有する。このシステムは、少なくとも2つの電子起動式比例流制御弁26、30を含み、それらは、シリンダの各口それぞれに連結されて、少なくとも1つのチャンバに出入りする流体流れを選択的に、比例的に制御する。少なくとも1つの圧力感知器38、40が設けられて、各チャンバそれぞれについての流体圧力を測定する。少なくとも1つの分離型位置感知器42が、シリンダの中点に隣接して位置して、ピストンの個別の中心位置を感知する。制御装置44はプログラムを含み、動作可能に接続されて、少なくとも1つの圧力感知器によって測定された圧力と、少なくとも1つの位置感知器によって測定された位置とに応答して、少なくとも2つの弁の起動を制御する。  (もっと読む)
(もっと読む)
1 - 13 / 13
[ Back to top ]