
Fターム[3J009FA26]の内容
Fターム[3J009FA26]に分類される特許
1 - 20 / 38
ギヤユニットおよびロボット
【課題】出力方向が互いに反対向きで、かつ同軸のインナー軸およびアウター軸に、それぞれ独立して動力を直接伝達可能で、しかもコンパクトなギヤユニットを提供する。
【解決手段】同心二軸の出力軸により構成され、出力方向を互いに反対向きとした同軸のインナー軸およびアウター軸と、それぞれ出力軸と直交する方向に延在し、インナー軸に連動連結する第1の入力軸およびアウター軸に連動連結する第2の入力軸とを備える。また、インナー軸の中途に取り付けられたインナーギヤと、アウター軸の基端に取り付けられたアウターギヤとを、互いに対向状態に配置する。そして、第1の入力軸と第2の入力軸とを、出力軸の軸方向に互いに所定距離だけ離隔して配置し、インナーギヤに第1の入力軸の第1入力ギヤを噛合させる一方、アウターギヤには第2の入力軸の第2入力ギヤを噛合させる。
(もっと読む)
ギヤユニットおよびロボット

【課題】同軸のインナー軸およびアウター軸に、それぞれ独立して動力を直接伝達可能としたコンパクトなギヤユニットを提供する。
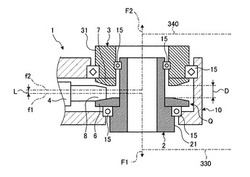
【解決手段】同心二軸の出力軸を構成する同軸のインナー軸(2)およびアウター軸(3)と、それぞれ出力軸と直交する方向に延在し、インナー軸(2)に連動連結する第1の入力軸(4)およびアウター軸(3)に連動連結する第2の入力軸(5)とを備える。インナー軸(2)に取り付けられたインナーギヤ(6)と、アウター軸(3)に取り付けられたアウターギヤ(7)とを、互いに対向状態に配置する。そして、第1の入力軸(4)と第2の入力軸(5)とを、出力軸の軸方向に互いに所定距離(L)だけ離隔して配置し、インナーギヤ(6)に第1の入力軸(4)の第1入力ギヤ(8)を噛合させる一方、アウターギヤ(7)には第2の入力軸(5)の第2入力ギヤ(9)を噛合させる。
(もっと読む)
ギアボックス及びこれを使用した二足歩行自動人形機械
【課題】構造の簡単化、制御の簡単化、マイコン等の電子部品の節約、電力の節約、全体の軽量化が図れたギアボックス及びこれを使用した二足歩行自動人形機械を提供する。
【解決手段】中空シャフト2と、正方角形の穴を彫ったギア4の中に通した磁石付シャフト1に付けた磁石11と、それらを挟む正転用ギア5と逆転用ギア19、その二つのギアを繋げる機能形状記憶合金6からなるギアボックス及びこのギアボックスを腕及び脚の間接部に使用した二足歩行自動人形機械。
(もっと読む)
ロボットおよびロボットシステム
【課題】アーム等の部位の位置ずれを防止すること。
【解決手段】実施形態に係るロボットは、減速機42aと、第1のシャフト61と、モータ41aと、第2のシャフト62と、外部ブレーキ44aとを備える。減速機42aは、入力部422へ入力される回転を減じて出力する。第1のシャフト61は、入力部422に対して接続される。モータ41aは、第1のシャフト61を回転させる。第2のシャフト62は、入力部422に対して接続される。外部ブレーキ44aは、第2のシャフト62の回転を規制する。
(もっと読む)
歯車構造体を有する変速装置のシリーズ、及び歯車構造体のシリーズ
【課題】歯車構造体の異なる複数種類の変速装置を、低コストに製造することができる変速装置のシリーズを提供する。
【解決手段】軸部材22の外周に第1歯車24及び第2歯車26が軸方向に並んで配置された歯車構造体を有する変速装置のシリーズであって、該シリーズは、歯車構造体A1を有する変速装置と、歯車構造体B1を有する変速装置を含み、該歯車構造体A1、B1は、それぞれ軸部材22の外周に第1歯部70及び第2歯部72が軸方向に並んで配置された共通のベース構造体74を備え、歯車構造体A1では、該ベース構造体74の第1歯部70をそのまま使用することによって当該歯車構造体A1の第1歯車24Aを構成し、歯車構造体B1では、前記ベース構造体74の第1歯部70の半径方向外側に、大径の第1歯車体80を、塑性流動を用いた結合で固定することによって当該歯車構造体B1の第1歯車24Bを構成する。
(もっと読む)
中間歯車減速機
【課題】本発明は、既存のモータとギヤヘッドを、これらを更に加工することなく組み合わせ可能にする装置の提供を目的としている。
【解決手段】本発明は、駆動源M1に歯車減速機GH2を組み付けるための中間歯車減速機1であって、駆動源M1の出力軸23との連結部8を有する入力軸6と、歯車減速機GH2の入力歯車34との連結部6aを有し、入力軸6を介して伝達された回転運動を歯車減速機GH2の入力歯車34に伝達する出力軸6と、歯車減速機GH2に取り付けるために、歯車減速機GH2の入力側取付部に対応する形状を有する歯車減速機取付部3,5と、駆動源M1に取り付けるために、駆動源M1の出力側取付部に対応する形状を有する駆動源取付部2,4とを備える。
(もっと読む)
偏心揺動型減速機を用いた産業用ロボットの旋回部構造
【課題】組み立て作業が容易でかつ安価に製作できる偏心揺動型減速機を用いた産業用ロボットの旋回部構造を提供する。
【解決手段】駆動モータ54の出力歯車56の回転を円筒状歯車61に伝達するアイドル歯車70を、特定の1つのクランクピン40aの入力側端部に回転可能に支持させるようにしたので、該アイドル歯車70を単に前記クランプピン40aに支持させるだけでよく、しかも、アイドル歯車70、入力歯車60の双方に噛み合う円筒状歯車61の軸方向長はこれら両歯車70、60の離隔側端距離より若干長い程度で充分である。
(もっと読む)
ロボットアーム駆動装置
【課題】人工筋肉をアクチュエータとして利用したロボットアームの可動範囲を広げると共にアーム先端からの反力によるアクチュエータの故障を防ぐロボットアーム駆動装置を提供する。
【解決手段】プーリ201と、プーリに直結したリンク213と、ワイヤー207,208,211,212と、電動機202とを備えたロボットアーム駆動装置であって、ウォーム203と、ウォームホイール204と、ワイヤー巻き取りプーリ205,206と、ワイヤー案内機構214,215と、またワイヤーの途中には人工筋肉209,210を備え、前記電動機で前記ウォームを駆動し、前記ウォームの回転を前記ウォームホイールに伝達し、前記ウォームホイールのシャフトに前記ワイヤー巻き取りプーリを備え、前記ワイヤーの張力により、前記プーリを駆動する。ウォームギアは負荷側からのトルクが電動機に伝わりにくいので、電動機を壊す事がない。
(もっと読む)
ヘキサポッド
独立した継ぎ手に装着された少なくとも5本、好ましくは6本のロッドがその上に配置された、好ましくは板状の受け器を備え、各ロッドのもう一方の端はマウンティングに接合されており、全てのマウンティングが移動路に沿って動くことができる、ヘキサポッドである。各マウンティング(8)を独立した支持部(3)に配置し、各マウンティング(8)がそれぞれの支持部(3)に沿って移動可能であるか、またはそれぞれの支持部(3)が対応のマウンティング(8)とともに移動可能であるかのいずれかであり、支持部(3)が環または環の一部であるか、あるいは二次元または三次元的な回旋状の空間形態を有し、閉じたまたは開いた移動路を規定している。 (もっと読む)
マニピュレータ用関節部
【課題】組立てが容易でコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】基部アーム及び回動アームの端部同士を連結し、端部を支点として前記回動アームを回動させるマニピュレータ用関節部である。マニピュレータ用関節部は、基部アームの端部に配設された関節軸と、回動アームの端部に形成されたユニット装着孔に嵌合する円筒状のハウジングと、該ハウジングの内部に配設され回動アームを関節軸に対して回転自在に支持する複列の転がり軸受と、を有する軸受ユニットと、を備える。ハウジングには、軸方向一方側の外周面に外径側に突出する鍔部が形成され、軸方向他方側の外周面に雄ネジ部が形成され、雄ネジ部にナットを螺合させることにより、回動アームが鍔部とナットに挟まれて軸受ユニットに固定される。
(もっと読む)
ウォームギヤの軸受構造
【課題】 ウォームギアのスラスト方向のがたつきを抑え、作動異音を抑制出来るウォームギヤの軸受構造を提供すること。
【解決手段】 ウォームギヤの軸受構造は、ウォーム部11とウォーム部11の一端側に設けられた軸部12と軸部12に一体形成されたスラスト支持部13とを備えたウォームギヤ10と、ウォームギヤ10が回転可能に配設されるハウジング20と、ウォームギヤ10とハウジング20との間に配設され、ウォームギヤ10からスラスト方向にかかる力を受ける軸受30、31と、を備え、軸受30、31は、スラスト支持部13とハウジング20との間に配設されて構成される。
(もっと読む)
駆動装置
【課題】特性が異なる2つのアクチュエータを組み合わせたハイブリッド型の駆動装置を提供する。
【解決手段】駆動装置は、直線運動を生成するエアシリンダと、エアシリンダの駆動を制御するエアシリンダ制御部と、エアシリンダで生成される直線運動に基づいて直線動作する第1作用部と、回転運動を生成する電気モータと、電気モータに連結されたウォームとウォームにかみ合うウォームホイールからなるセルフロック機能の無いウォーム機構又はセルフロック機能の有るウォーム機構を含む変換部と、電気モータの駆動を制御する電気モータ制御部と、第1作用部に連結されるか又は係合可能であり、変換部で生成される直線運動に基づいて直線動作する第2作用部を備えており、エアシリンダ制御部はエアシリンダを駆動して第1作用部に一定の推力を加え、電気モータ制御部は電気モータを駆動し、第2作用部を介して第1作用部に、推力と第1作用部に加わる外力との合力の作用方向とは逆方向に規制力を加えながら、第1作用部の動作速度と位置を制御する。
(もっと読む)
可変剛性機構及びロボット
【課題】小型の機構で安全性と制御性能を両立できるようにするとともに、最も剛性を高くした状態での剛性を非常に高くすることができる可変剛性機構及びロボットを提供する。
【解決手段】固定部材と、収縮量によってばね定数が変化する非線形ばねと、固定部材との位置を非線形ばねによって支持される支持部材と、非線形ばねに力を加えて非線形ばねの収縮量を変化させる加圧部材と、加圧部材の位置を動かすための剛性調節アクチュエータとを有し、支持部材は、少なくとも1つの突起部を備え、突起部はそれぞれ非線形ばねによって挟まれており、剛性調節アクチュエータは固定部材と加圧部材との位置を変化させる。
(もっと読む)
回転駆動機構の取付構造
【課題】歯車間のバックラッシの調整を作業者の経験等に依存することなく簡単に行うことができる回転駆動機構の取付構造を提供する。
【解決手段】従動回転機構20の第1歯車21と、回転駆動機構の1種である減速機40の第2歯車41とを噛合させる際のバックラッシを調整する。フレーム50の減速機取付部30に、同一円周上に位置するように等間隔で複数のボルト挿通孔80を形成し、減速機40のケーシング43にボルト挿通孔80と連通するように第2歯車41の回転中心に対して偏心した同一円周上に位置する複数のネジ穴70を形成する。ネジ穴70とボルト挿通孔80とが連通するようにケーシング43の取付位置を変更し、その際に第1歯車21と第2歯車41との間のバックラッシが所望の値となる状態を選び、ボルト挿通孔80を通してネジ穴70にボルト75を螺合し、ケーシング43を取り付ける。
(もっと読む)
内歯歯車式変速機及び変速機の設計方法
【課題】内歯歯車を用いた変速機において高効率で高変速比が得られるとともに構造の簡易性を確保し、小型化を図ることができる構造を実現する。
【解決手段】本発明の内歯車式変速機100は、複数の歯車を備えた変速機であって、内歯歯車111と、内歯歯車の軸線に対して平行に固定された軸線を有し、内歯歯車と噛合する第1の外歯歯車112と、第1の外歯歯車と同軸に連結され第1の外歯歯車より大径の第2の外歯歯車113と、第2の外歯歯車に対して第1の外歯歯車の内歯歯車に対する噛合位置とは反対側に平行に固定された軸線を有し、該反対側から第2の外歯歯車と噛合し第2の外歯歯車より小径に構成された第3の外歯歯車114とを具備し、内歯歯車と第3の外歯歯車の軸線が一致し、第3の外歯歯車の軸線方向の少なくとも一方側が内歯歯車に対して回転自在に軸支される。
(もっと読む)
マニピュレータ用関節部
【課題】組立てが容易でコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】基部アーム3及び回動アーム4の端部同士を連結し、前記端部を支点として回動アーム4を回動させるマニピュレータ用関節部6である。この関節部は、基部アームの端部に固定した関節軸9と、回動アームの端部に組付けられ、内部に並列に2個配設した転がり軸受により関節軸を回転自在に支持する軸受ユニット8と、回動アームに関節軸回りの回動を伝達する駆動機構10,11とを備えている
(もっと読む)
ギヤードモータ
【課題】 モータの出力軸に設けられた円筒歯車と、それに噛み合うフェースギヤとの減速比を極めて容易に変更することができるギヤードモータを提供することを目的とする。
【解決手段】 出力軸に円筒歯車を有するモータと、初段歯車としてフェースギヤを備える歯車減速機とからなるギヤードモータにおいて、前記歯車減速機30の前記初段歯車に用いるフェースギヤ32として、歯数の異なる歯車を選択可能に構成し、前記モータ20の出力軸20aに設けられる円筒歯車22を、前記歯車減速機30の初段歯車として組み付けられる前記フェースギヤ32のうち最も歯数の多い歯車から最も歯数の少ない歯車まで共通に噛合することが可能な長さに形成し、前記初段歯車のフェースギヤ32の歯数を選択して、減速比を変更可能にしたギヤードモータ。
(もっと読む)
ギヤードモータ
【課題】 モータの出力軸に設けられた円筒歯車と、それに噛み合うフェースギヤとの減速比を極めて容易に変更することができるギヤードモータを提供することを目的とする。
【解決手段】 出力軸に、はすば歯車を用いた円筒歯車を有するモータ20と、初段歯車として、前記はすば歯車に噛合するフェースギヤを備える歯車減速機30とからなるギヤードモータにおいて、前記円筒歯車22と前記初段歯車を、互いの軸が交差しないようにオフセットさせて噛合させ、前記初段歯車を、前記歯車減速機30のケース31内の異なる箇所に軸支可能に構成し、前記異なる箇所の軸支位置で、前記初段歯車として減速比の異なるフェースギヤ32,35を選択的に組み付け可能にしたギヤードモータ。
(もっと読む)
産業用ロボット
【課題】サーボモータを駆動源とした旋回台又はア−ムとを有する産業用ロボットにおいて、減速機がロボットに組付けられた後、減速機の交換や旋回台又はア−ムを取り外すことなく、関節機構の減速比を簡単に変更できる構造を有する産業用ロボットを提供。
【解決手段】サーボモータ駆動軸軸心 15bに対し偏心した円周面 15aを持ちサーボサーボモータ12を固定したモータ取付け部材17と、偏心した円周面 15aに嵌合する補合円周面25を有し旋回台又はア−ム 2上面に設けたモータ取付けフランジ26と、を有し、
嵌合する補合円周面25に対し偏心した円周面 15aを相対回転することにより、前記モータ駆動軸軸心 15bと減速機入力軸軸心 13bとの距離を可変にでき、
ピニオン14のみを交換することにより、サーボモータ12と減速機出力軸21の減速比を可変にできることを特徴とする産業用ロボット。
(もっと読む)
直交型減速機
【課題】出力軸に対する最終段歯車の位置変更や、最終段歯車と軸受の位置決め用のスペーサが不要な、部品点数が削減できる直交型減速機を得る。
【解決手段】ギヤケースの中心部に位置するように設けられた第1歯車を有する駆動軸11と、上記駆動軸に対し軸方向が直交する方向に配設され、かつ上記ギヤケースに対して、上記駆動軸の方向から見て左右任意の向きに取り付け可能に支承され、上記第1歯車に係合する第2歯車及びこの第2歯車に同軸に設けられた第3歯車を有する第2第3歯車軸組立体22と、この第2第3歯車軸組立体に対し軸方向が平行で少なくとも一端部が上記ギヤケースから突出され、かつ上記ギヤケースに対して上記駆動軸の方向から見て左右任意の向きに取り付け可能に支承され、上記第3歯車に直接または他の減速歯車を介して係合する最終段歯車を有する出力軸23を備えるように構成した。
(もっと読む)
1 - 20 / 38
[ Back to top ]