
Fターム[3J057GB12]の内容
油圧・電磁・流体クラッチ・流体継手 (17,432) | 制御のための検出又は入力信号 (3,026) | クラッチ (1,412) | 係合又は切断 (949) | クラッチ操作のストローク量 (153)
Fターム[3J057GB12]に分類される特許
1 - 20 / 153
ハイブリッド車両におけるトルク伝達特性の検出方法
【課題】車両を発進させることなく、またクラッチにダメージを与えることもなく、比較的正確なトルク伝達特性を得る。
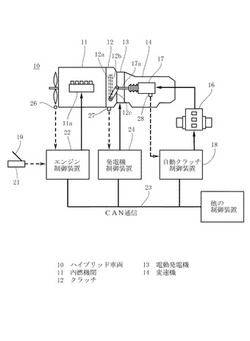
【解決手段】本発明のトルク伝達特性の検出方法は、内燃機関11にクラッチ12及び電動発電機13をこの順序に介して変速機14が連結されたハイブリッド車両10における方法である。変速機をニュートラルとしてクラッチを接続し内燃機関と電動発電機を同期して回転させる同期回転工程と、電動発電機により内燃機関の回転方向と逆方向に所定のトルクを発生させる所定トルク発生工程と、クラッチを切断方向に移動させて内燃機関と電動発電機の回転に差が生じた位置クラッチストロークを検出するストローク値検出工程とを順次繰り返してトルク伝達特性を得る。後における所定のトルクを、先の所定トルクより小さくすることが好ましい。
(もっと読む)
制御装置

【課題】クラッチのタッチ点の学習を、運転者の違和感を抑制しつつ、精度よく実行する技術を提供すること。
【解決手段】エンジンと、エンジンからの車輪側への動力伝達を遮断可能なクラッチと、クラッチと車輪との間を接続し、クラッチを介して伝達されたエンジンの動力を遮断することなく車輪に伝達する動力伝達機構と、を備える車両を制御する制御装置であって、車両の走行中に、エンジンが所定回転速度以上で回転駆動し、クラッチのトルク容量が0である状態で、クラッチを制御することによってクラッチのトルク容量を0の状態から増加させるトルク容量増加制御を行うトルク容量増加制御部と、トルク容量増加制御により、エンジンの回転速度の変化量が所定値となった状態におけるクラッチの制御値を特定可能な制御情報を記憶する制御である学習制御を、実行する学習制御部と、を備える。
(もっと読む)
変速装置
【課題】AT方式、AMT方式或いはDCT方式等、クラッチ操作が自動制御される変速装置において、運転者がクラッチをマニュアル操作して駆動力を調整でき、ドライバビリティの向上を図ること。
【解決手段】第1クラッチ74及び第2クラッチ75を有するDCT方式の変速機160において、クラッチレバー200の操作量に基づいて、クラッチ74,75のクラッチトルク容量を調整する動作指令値を決定してクラッチアクチュエータ77,78へ出力することにより、クラッチトルク容量を操作する。クラッチレバー200では、クラッチレバー200の操作量に対する操作反力の増加割合は、少なくとも2段階に変化する。
(もっと読む)
摩擦クラッチ装置
【課題】クラッチ継合動作不良が発生したときの原因をアクチュエータの故障または摩耗追従機構の故障のどちらかに判別して、動作不良の原因究明及び故障個所の修理を効率的に実施できるようにした摩擦クラッチ装置を提供する。
【解決手段】駆動側プレート2と、摩擦材31、32を有する従動側プレート3と、従動側プレート3を押動するプレッシャプレート4と、プレッシャプレート4を駆動するアクチュエータ4と、プレッシャプレート4の移動ストローク量を検出するストローク検出手段6と、従動側プレート3の摩擦材31、32の摩耗量に応じて駆動側プレート2とプレッシャプレート4との間の間隙長dを調整する摩耗追従機構7と、クラッチ継合動作不良が発生したときに、移動ストローク量の変化に基づいて動作不良の原因をアクチュエータ5の故障または摩耗追従機構7の故障のどちらかに判別する故障判別手段81と、を備える。
(もっと読む)
クラッチの摩耗自動調整機構の作動不良検出方法
【課題】車両の原動機からクラッチを介して変速機へ伝達される伝達トルクが所定の必要伝達トルクを満足しないトルク不足の状態となっていることを検出することが可能なクラッチの摩耗自動調整機構の作動不良検出方法を提供する。
【解決手段】クラッチの摩耗自動調整機構の作動不良検出方法は、クラッチの各摩擦部材が摩耗する前に、クラッチの伝達可能トルクTaとクラッチのストロークLとの初期関係線H0を設定する設定工程と、クラッチの伝達可能トルクTaが所定値であるときのストロークLを検出する検出工程と、検出工程における所定値の伝達可能トルクTa及び検出したストロークLを通過するように初期関係線H0を平行移動して摩耗後関係線Hxを定め、摩耗後関係線Hxを用いてクラッチの最大ストロークLzにおける最大伝達可能トルクTzxが所定の必要伝達トルクTr未満であると推定されるときに摩耗自動調整機構の作動不良であると判定する判定工程と、を備えている。
(もっと読む)
車両の動力伝達制御装置
【課題】AMTを搭載した車両に適用される車両の動力伝達制御装置であって、車両のユーザーがクラッチの動作異常の発生を容易に知ることができるものを提供すること。
【解決手段】この装置では、有段変速機がニュートラル状態にある場合において、クラッチストロークStの目標値が一定速度で変化するようにクラッチアクチュエータに供給される供給電流がフィードフォワード制御される。このときのStの実際値の推移がクラッチストロークセンサから取得される。Stの実際値の推移がStの目標値の推移に対して乖離する度合、及び/又は、Stの時間微分値dSt/dtの実際値の推移がdSt/dtの目標値の推移に対して乖離する度合に基づいて、「クラッチの動作異常が発生した」と判定される。この判定がなされると、ユーザーに警告がなされる。
(もっと読む)
車両の微動制御装置
【課題】本発明は、クラッチの保護を図りつつ、微動走行を容易に行うことが可能な車両の微動制御装置を提供する。
【解決手段】車両のクラッチのストロークを制御する制御手段を備え、当該制御手段は、車両停止状態から第1の所定量Ac1以下のアクセルオンにてクラッチを接続して車両を微動発進し、当該微動発進中にアクセルオフした場合に、クラッチのストロークを半クラッチ開始点St1以上の第2の所定量St2に保持して微動走行を行う。
(もっと読む)
車両用クラッチ制御装置
【課題】クラッチなどが過度に昇温した場合、駆動力の低下を回避すると共に、運転者に予期しない違和感を与えることがないようにした車両用クラッチ制御装置を提供する。
【解決手段】エンジンの出力を変速機に伝達する機械式摩擦クラッチとクラッチを開閉方向または締結方向に駆動するアクチュエータの少なくともいずれかが温度上昇を抑制すべき温度上昇抑制制御を必要とするか否か判断し、温度上昇抑制制御が必要と判断されるとき、目標クラッチ容量が所定値以上か否か判定し(S102)、所定値以上と判定されるときは運転者のクラッチペダル操作に所定時間内に追従するようにアクチュエータの動作を制御する一方、所定値以上ではないと判定されるときは運転者のクラッチペダル操作に所定時間より長い時間内に追従するように目標クラッチ容量を補正する(S104)。
(もっと読む)
機械式自動変速装置の制御システム
【課題】本発明は、変速時のショックを低減することのできる機械式自動変速装置の制御システムを提供する。
【解決手段】エンジントルク算出部(31)にて、エンジン(10)の回転速度と吸入空気量と、燃料噴射量とに基づいてエンジントルクTegを算出する。また、回転変化量算出部(32)にて、回転速度変化量aegを算出する。そして、クラッチトルク算出部(33)にて、エンジントルクTegと回転速度変化量aegとエンジン慣性モーメントIegと式(1)に基づいて、クラッチトルクTclを算出する。次に、クラッチストローク算出部(34)にて、クラッチトルクTclとクラッチストロークSclとの関係を示すマップよりクラッチストロークSclを算出し、クラッチ操作部(25)をクラッチストロークSclとなるように作動させる。
(もっと読む)
ハイブリッド車両の変速制御装置
【課題】各種変速状態においてクラッチアクチュエータ作動量の学習に適した変速状態を抽出し学習を行なうことによってクラッチアクチュエータ作動量の補正精度を向上させることが可能な変速制御装置を提供する。
【解決手段】対応関係補正手段は、エンジン回転数Neと自動変速装置の入力軸回転数Niとの差の絶対値|Ne−Ni|が所定値以上であることを判定する回転差判定手段と、変速時に変速作動が完了し、且つ差の絶対値|Ne−Ni|が所定値以上であることを条件とし、クラッチアクチュエータ作動量とクラッチトルクとの対応関係において、クラッチ制御手段によってクラッチアクチュエータに作動された目標クラッチトルクに対応するクラッチアクチュエータ作動量に対応するクラッチトルクの値を推定クラッチトルク演算手段によって演算された推定クラッチトルクTesに置き換えるクラッチトルク−作動量補正手段と、を有する。
(もっと読む)
車両の変速制御装置
【課題】製品毎のばらつきに基づくロッド作動量のばらつきを、簡易にかつ適切に学習し補正することが可能な変速制御装置を提供する。
【解決手段】エンジン11と、自動変速装置13と、目標クラッチトルクTrに制御するクラッチ30と、アクチュエータ61によって出力ロッド64をロッド作動量作動させるクラッチアクチュエータ17と、ロッド作動量Saに応じて油圧を発生させるマスタシリンダ65と、クラッチ30を切断および係合制御するスレーブシリンダ71と、クラッチトルク−作動量記憶手段51と、クラッチ制御手段52と、ロッド作動量検出手段67と、アクチュエータ電流検出手段28と、油圧発生時アクチュエータ電流Iocを検出し油圧発生時アクチュエータ電流Iocが検出された時に検出されたロッド作動量位置をクラッチトルクTcとクラッチアクチュエータのロッド作動量Saとの対応関係におけるクラッチ30の係合側の原点位置に置き換える原点位置補正手段53と、を有する。
(もっと読む)
車両制御装置
【課題】クラッチの学習において学習するトルクに偏りが生じることを抑制できる車両制御装置を提供すること。
【解決手段】制御可能なクラッチを介して車両の駆動輪と接続された第一動力源と、クラッチを介さずに駆動輪と接続された第二動力源と、を備え、第一動力源の出力トルクを学習対象のトルクまで増減させ、かつ当該増減させた分のトルクを打ち消すトルクを第二動力源に出力させて(S1,S2)、学習対象のトルクについてクラッチの学習を行う(S5〜S7)。
(もっと読む)
クラッチ駆動機構の制御装置
【課題】検出角度範囲の大きな高価な角度センサを用いることなく、カム部材の回転を検出する角度範囲を広く且つ精度良く検出可能な制御装置を得る。
【解決手段】カム面と当接して往復直線移動を行う作動部材35によりクラッチを接離させるクラッチ駆動機構と、カム部材25の回転角度を検出する角度センサ21を有するクラッチ駆動機構の制御装置において、前記カム面は、カム部材25の一方向の回転により作動部材35の直線移動を介して前記クラッチを接続させる第1カム面25d,25aと、第1カム面25aに連続し作動部材35の直線移動を介して前記クラッチを離断させる第2カム面25b,25cを備え、角度センサ21は、前記第1カム面の角度範囲が検出可能な状態に設置された角度センサ21aと、前記第2カム面の角度範囲が検出可能な状態に設置された角度センサ21bとで構成され、各角度センサの不感帯Eが重合しないようにする。
(もっと読む)
発進制御装置
【課題】ドライバの発進意図の有無を正確に判定する。
【解決手段】発進制御装置(ECU200)は、クラッチストロークセンサ129を介して、クラッチペダル10のストロークを検出する位置検出部201と、位置検出部201による検出結果に基づいて、ドライバの発進意図の有無を判定する意図判定部205と、意図判定部205によって、ドライバの発進意図が無いと判定された場合に、車両の発進を禁止する発進禁止部206と、を備える。
(もっと読む)
車両用自動クラッチの制御装置
【課題】車両自動クラッチにおいて、その応答性を向上させることができる車両用自動クラッチの制御装置を提供する。
【解決手段】クラッチストロークcltsの要求値cltsrと実際値cltsとの偏差Δcltsが所定値αを越える状態から、要求値cltsrと実際値cltsとの大小関係が反転した場合には、フィードバック制御を初期化する。このようにすれば、クラッチストロークcltsの要求値cltsrと実際値cltsとの大小関係が反転すると、フィードバックの制御量が零にリセットされる。したがって、フィードバック制御の積分項等が零となった状態から再計算されるので、例えばそれまでに蓄積された積分項が収束するのに要する時間遅れがなくなるため、クラッチアクチュエータ34の応答性が向上する。すなわち自動クラッチ14の応答性が向上する。
(もっと読む)
車両の制御装置
【課題】摩擦係合要素状態のばらつきに拘らず、駆動源回転数の吹け上がりを抑制することができる車両の制御装置を提供する。
【解決手段】本発明の車両の制御装置は、駆動源制御手段(図11)により、駆動源(エンジン)1からの出力トルクを制御するトルク指令値を、伝達容量検出手段(CL1ストロークセンサ)16により検出された摩擦係合要素(第1クラッチ)4における伝達トルク容量を超えない値に設定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時における第2クラッチの締結防止によるショック低減と、バッテリの劣化防止と、の両立を図ること。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータジェネレータ2と、第1クラッチ4と、第2クラッチ5と、バッテリ電力制限拡大制御手段(図12)と、を備える。モータジェネレータ2は、バッテリ8からの電力により駆動する。第1クラッチ4は、エンジンとモータジェネレータ2の間に介装され、モータジェネレータ2をスタータモータとするエンジン始動時に締結される。第2クラッチ5は、モータジェネレータ2とタイヤ7,7の間に介装され、エンジン始動時にスリップ締結される。バッテリ電力制限拡大制御手段(図12)は、エンジン始動時、最もモータトルクが必要な状態を含むエンジン始動領域を検知すると、通常時のバッテリ電力制限を一時的に拡大する電力制限拡大要求を出す。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時に接続される第1クラッチのトルク容量制御精度を向上させることにより、第1クラッチの耐久信頼性を確保しながら、エンジン始動時間やエンジン始動ショックのばらつき低減を達成すること。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータジェネレータ2と、第1クラッチ4と、第2クラッチ5と、第1クラッチトルク指令値補正制御手段(図9,図10)と、を備える。第1クラッチ4は、モータジェネレータ2をスタータモータとするエンジン始動時に接続される。第2クラッチ5は、エンジン始動時にスリップ締結される。第1クラッチトルク指令値補正制御手段(図9,図10)は、第1クラッチ4を接続するエンジン始動時、第1クラッチ伝達トルクをエンジン回転数から推定し、推定結果に基づいて、第1クラッチトルク指令値TTCL1を補正する。
(もっと読む)
車両用学習装置およびハイブリッド車両
【課題】クラッチに関する学習機会を適切に確保することができる車両用学習装置を提供すること。
【解決手段】エンジン1と、制御可能なクラッチ5と、クラッチを介してエンジンに接続された入力軸2Aと、車両100の駆動輪16に接続された出力軸2Bと、を有する変速機2と、変速機をニュートラルとした状態で駆動輪に動力を出力可能なモータジェネレータ3と、を備え、エンジンを運転させ、かつ変速機をニュートラルとした状態で、クラッチの係合度合いに関する学習制御を行う。
(もっと読む)
車両の前後進クラッチ制御装置
【課題】部品の寸法差や操作方法の差による影響を受けることなく、ペダル操作によるフィーリングの良い発進操作が常に安定して可能となる前後進クラッチ制御装置を提供する。
【解決手段】前後進クラッチ制御装置は、クラッチペダルOの操作角度検出結果に基づいて、前進クラッチ又は後進クラッチ35a,35bへの送油圧を制御可能に構成し、前記クラッチペダルOを踏み込んで前進クラッチと後進クラッチ35a,35bとを共に遮断した状態から、該クラッチペダルOの復帰操作の初期には、前記前進クラッチまたは後進クラッチ35a,35bのクラッチ板Sがミートする位置までクラッチピストンRをすばやく移動させるように所定の定圧で送油し、この送油中の圧力が設定圧力以上に達したときに、前記定圧での送油を中止して、クラッチペダルOの操作角度に応じて変更される圧力での送油に切り換えるように連繋するものである。
(もっと読む)
1 - 20 / 153
[ Back to top ]