
Fターム[3J102AA01]の内容
その他の軸受(磁気軸受、静圧軸受等) (9,013) | 軸受の種類 (959) | 磁気軸受 (404)
Fターム[3J102AA01]に分類される特許
81 - 100 / 404
制御型磁気軸受装置
【課題】 面倒な制御ゲインテーブルを作成する必要がなく、磁気浮上運転前の調整に時間を要しない制御型磁気軸受装置を提供する。
【解決手段】 制御型磁気軸受装置は、回転体4を1つの水平な制御軸X方向の所定の目標位置に磁気吸引力により非接触支持するために前記制御軸X方向の両側から回転体4を挟むように配置された1対の電磁石29Xa,29Xbを備えているものであって、回転体4の目標位置からの前記制御軸X方向の変位を検出する変位検出手段と、回転体を目標位置に支持するために各電磁石29Xa,29Xbに一定のバイアス電流および回転体4の前記変位によって変化する制御電流からなる励磁電流を供給する電磁石制御手段とを備えている。電磁石制御手段が、バイアス電流を常に0とするゼロバイアス制御を行うもので、かつ、前記変位に応じて適応的に変化するゲインで負帰還する単純適応制御を行うものである。
(もっと読む)
モータ制御装置

【課題】装置を追加することなく、停電が発生した場合でも、軸支持運転を比較的長時間保つことができるモータ制御装置を提供する。
【解決手段】停電検出器55が停電を検出したとき、駆動側制御回路11では、切替スイッチ56によって回転角速度指令値ω*を零に切り替えることにより、ベアリングレスモータ1を減速させ且つ駆動側のインバータ13を介してベアリングレスモータ1から直流リンク回路46側へベアリングレスモータ1の発電電力を回生するように駆動側のインバータ13を制御し、この回生電力が直流リンク回路46を介して軸支持側のインバータ14へ供給される構成とする。また、リミッタ下限値調整回路51では、電圧検出器54で検出される直流リンク電圧値VDCが直流リンク電圧設定値VDC*よりも低下したときに負の下限設定値を出力し、可変リミッタ57では、この負の下限設定値を可変リミッタ57の下限設定値として設定する構成とする。
(もっと読む)
タッチダウン軸受
【課題】空転停止性能に優れたタッチダウン軸受を提供する。
【解決手段】内輪61と、外輪62と、内輪61及び外輪62の間で転動可能に配置された転動体とを有するタッチダウン軸受であって、少なくとも1個の転動体63bの比重又は径を、他の転動体63aの比重又は径と異なるようにする。このように構成することにより、タッチダウン軸受が空転し始まる際、重量または径の異なる転動体が、慣性の違いから隣接する転動体に追いつくか、遅れるかして接触し、そのまま摺勤し続ける。この接触により、タッチダウン軸受の回転エネルギーを減少させ、タッチダウン軸受を早く停止させることができる。
(もっと読む)
スラストバランス調整装置及び回転機械
【課題】簡易な構成でコストを抑えつつスラスト軸受に作用するスラスト荷重を低減させることが可能なスラストバランス調整装置及び回転機械を提供する。
【解決手段】スラストバランス調整装置10は、回転体4に設けられたバランスピストン11と、バランスピストン11を回転可能に収容し、流体が流通可能に連通する略環状のバランス室12と、バランス室12内の外周側に設けられて流体の軸方向Aへの流通を制限し、相対的にバランスピストン11の軸方向A一方側を高圧室15に、他方側を低圧室16に設定する第一のシール手段13と、高圧室15または低圧室16の少なくとも一方に設けられてバランス室12とバランス室12の外側との流体の流通を制限する第二のシール手段14と、スラスト磁気軸受を駆動させて、バランスピストン11の軸方向Aの位置を調整して、高圧室15と低圧室16との圧力差を制御する圧力制御手段とを備える。
(もっと読む)
タッチダウン軸受
【課題】空転停止性能に優れたタッチダウン軸受を提供する。
【解決手段】磁気軸受とともに用いられる、内輪61と、外輪62と、内輪61及び外輪62の間で転動可能に配置された転動体63とを有する転がり軸受のタッチダウン軸受であって、内輪61及び外輪62のそれぞれの対向面の一方に半硬質磁性材料からなる半硬質磁性部材64が設けられている。円環状をなす一以上の磁石部材65が、半硬質磁性部材64に対向するように内輪61又は外輪62に設けられている。
(もっと読む)
浮上体のセンシング方法
【課題】センサ不使用による低コスト化と省スペース化が図れると共に、浮上体位置の検知精度を向上できる浮上体のセンシング方法を提供する。
【解決手段】磁気浮上している浮上体10の周囲に配置され、それぞれコア11、12とコア11、12に巻回されたコイル13、14とを有する複数の電磁石15、16を用いて浮上体10をセンシングする方法であって、各コイル13、14に共振回路17、18を形成するコンデンサ19、20をそれぞれ直列又は並列に設け、各コイル13、14間の電圧から浮上体10の位置を検出する。
(もっと読む)
移動体
【課題】リニアモータの原理を応用し、非接触で車輪を回転させることが可能な移動体の提供。
【解決手段】中空筒状の回転軸を有する車輪5と、車輪5の軸方向の側面に配置されたフレーム6と、車輪5の軸方向の側面に、フレーム6に向かって異種の磁極が車輪5の回転方向に交互に配置されるように設けられた永久磁石群10a,10bと、フレーム6の車輪5側に固定され、車輪5の回転方向に移動する移動磁界を発生させる誘導コイル群12a,12bと、フレーム6に支持され、車輪5の回転軸内に挿入された車軸11と、車輪5の回転軸の内周面および車軸11の外周面に、それぞれ同種の磁極が向かい合わされて配置されるように設けられた永久磁石対15a,15bとを有する。
(もっと読む)
ベアリングレスモータのパラメータ設定方法
【課題】ベアリングレスモータの制御において、軸支持変調式で用いるパラメータを、実際のモータの特性に応じて最適に設定する。
【解決手段】トルク電流指令値(imq*)を順次変化させていき、軸支持電流指令値(isq1*)が0のときの軸支持電流指令値(isd1*)を基に、第1の軸支持側制御系に用いる比例係数KA1,KC1を求め、軸支持電流指令値(isd1*)が0のときの軸支持電流指令値(isq1*)を基に、第1の軸支持側制御系に用いる比例係数KB1,KD1を求め、軸支持電流指令値(isq2*)が0のときの軸支持電流指令値(isd2*)を基に、第2の軸支持側制御系に用いる比例係数KA2,KC2を求め、軸支持電流指令値(isd2*)が0のときの軸支持電流指令値(isq2*)を基に、第2の軸支持側制御系に用いる比例係数KB2,KD2を求める。
(もっと読む)
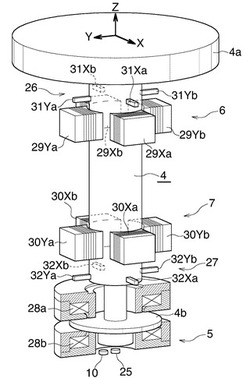
磁気浮上式回転体の回転推進装置
【課題】 発電部の構造を簡素化するとともに、1万回転数に及ぶ超高速回転を実現できる磁気浮上式回転体の回転推進装置を提供する。
【解決手段】 磁気浮上式回転体の回転推進装置において、発電部Bは、回転体中心部に配置されるアクリルパイプ71と、このアクリルパイプ71の外周部に配置されるスポンジリング72と、このスポンジリング72の外周に所定間隔で配置される4極の薄板状磁石73と、緩衝用スポンジ74と、アルミニウム管75、そのアルミニウム管75に所定間隔で8箇所に形成される穴76とを備え、前記スポンジリング72は、前記回転体のアルミニウム管75の内部に配置され、多孔質によって推進気体を緩衝し、前記回転体自体が質量保存の法則とエネルギー保存の法則を基本としてセルフコントロールできる機能を有する。また、前記回転体には、前記推進気体を吹き付けるノズルとを具備する。
(もっと読む)
転がり軸受装置
【課題】タッチダウン時において、転がり軸受が片当たりを繰り返すことを抑制できて転がり軸受が破損することを抑制できると共に、軌道輪の軌道面および転動体に焼付きが発生しにくい転がり軸受装置を提供すること。
【解決手段】ハウジング部材2の内周面に総玉軸受70を締まり嵌めにより内嵌して固定する。総玉軸受70の内輪32の内周面に、形状記憶合金製で周方向に波打つ環状の変形部材52の外周面を固定する。変形部材52の内周面に金属製の円筒部材54の外周面を固定する。
(もっと読む)
磁気軸受制御装置と方法
【課題】ロータの回転周波数と異なる外力が作用する場合でも、その外力の周波数を危険速度を通過させることができ、回転同期成分以外の周波数帯域の位相を進めることができ、回転体の加減速が早い場合でもトラッキングが外れることがなく、回転同期成分を抽出するPLL(フェーズロックドループ)が不要である磁気軸受制御装置と方法を提供する。
【解決手段】ロータ11の変位x,yに基づきロータを中立位置に保持するフィードバック制御器22と、予め設定した周波数範囲(ωf±Δω)のロータの変位信号x,y又はフィードバック制御器の電流指令信号Ix,Iyのみを抽出する広帯域フィルタ24と、抽出したx軸の入力信号に所定のゲインkをかけてy軸用電磁石12yの電流指令信号Iyに重畳させ、抽出したy軸の入力信号に所定のゲインkをかけてx軸用電磁石12xの電流指令信号Ixに重畳させるクロス回路28とを備える。
(もっと読む)
磁気軸受制御装置と方法
【課題】ロータの回転周波数と異なる外力が作用する場合でも、その外力の周波数を危険速度を通過させることができる磁気軸受制御装置と方法を提供する。
【解決手段】ロータ11の変位x,yに基づきロータを中立位置に保持するフィードバック制御器22と、ロータの回転周波数に同期する同期周波数ωNに基づきこれに一致する不釣合い力を相殺する同期フィードフォワード制御器24と、ロータの回転周波数に同期しない回転非同期周波数ωFに基づきこれに一致する不釣合い力を相殺する1又は複数の回転非同期フィードフォワード制御器26とを備える。
(もっと読む)
磁気軸受
【課題】工作機械の振動を低減して、工作機械の加工精度を向上させることができる磁気軸受を提供すること。
【解決手段】主軸2にラジアルロータ80及びアキシャルロータ90が取り付けられており、ラジアルロータ80及びアキシャルロータ90を浮遊状態に保持するXステータ81、Yステータ85及びZステータ91がケース6に取り付けられている。そのXステータ81、Yステータ85及びZステータ91は、それぞれX圧電素子84、Y圧電素子88及びZ圧電素子94を備えており、それら圧電素子は、制御装置7によって制御されることで伸縮される。その伸縮により、ラジアルロータ80及びアキシャルロータ90の浮遊位置が移動され、主軸2に取着されるエンドミルEがケース6に対して移動されるので、フライス盤100の振動を低減してフライス盤100の加工精度を向上させることができる。
(もっと読む)
ジャケット付きアキシアル磁気ベアリング
【課題】腐食性、酸性、または粒子を持つ気体雰囲気と接触しているロータを取り付けられている回転機械のための、ジャケット付きアキシアル磁気ベアリングを提供する。
【解決手段】磁気ベアリングは、ロータ6に固定され腐食性、酸性気体雰囲気に設置されているディスク状のロータアーマチャー7と、支持装置1に固定されているステータ磁気回路4とを有し、ステータ4の前記磁気回路は、少なくとも1つのコイル42,43と金属性保護カバー2,3中の強磁性体41とを有する。保護カバー2,3は、ウェブ20と外側フランジ22とチャネル−セクションカバー状の環状ジャケット3とを有する。環状ジャケット3は、内側および外側フランジ31,32とクロージャーウェブ30とを有し、環状ジャケット3の内側および外側フランジ31,32の自由端は、環状支持部2の内側および外側フランジ21,22の自由端に溶接されている。
(もっと読む)
圧縮機とそれを用いた冷蔵庫
【課題】摩擦損失の少ない軸受構造を有する圧縮機とそれを用いた冷蔵庫を提供する。
【解決手段】電動要素,フレーム,圧縮要素、前記電動要素と前記圧縮要素を繋ぐ軸、前記軸と同軸に設置される複数のリング形状の永久磁石を有する圧縮機において、内径側と外径側で異なる極となるよう着磁されたリング形状の永久磁石である回転側磁石21と、内径側と外径側で異なる極となるよう着磁されたリング形状の永久磁石である固定側磁石22を有する磁気軸受20を備え、磁気軸受20によりクランクシャフト7のスラスト方向を支持し、かつ、磁気軸受20からコネクティングロッド2までの間の距離を、滑り軸受もしくは転がり軸受1aからコネクティングロッド2までの間の距離よりも長くする構成を採用した。
(もっと読む)
集合磁石
【課題】 従来の永久磁石10と鉄片等の磁性体11を適切に組み合わせることで、強力な磁力を持つ集合磁石1の製造を実現し、これに伴い、磁石原料の使用量を減らしながら、磁力の強力な磁石を提供し、さらに、前記集合磁石を利用したマグネットカップリングを提供する。
【解決手段】 互いに反発する極性を向かい合わせた少なくとも2つの永久磁石10の間に、前記永久磁石10から発生する磁力を誘導するために任意の一方向に突出した磁力誘導部13Aを設けた磁性体11Aを挟み、前記永久磁石10の外側から前記磁性体11Aと同様の方向に磁力誘導部13Bを設けた磁性体11Bで挟み込んで固定し櫛歯状に構成した。
(もっと読む)
位置決め装置
【課題】バーミラーを用いることなく、干渉計の測長光路を減圧して位置決め精度を向上させることで、ステージ外部の減圧が困難な加工装置等への適用及び装置の小型化を可能にする。
【解決手段】位置決め装置の固定部であるベース1は、Yガイド面2を有し、Y凹空間部6、シール部7、Y軸受8を有するYスライダ3は、Yガイド面2に沿って移動する。X凹空間部9、シール部10、X軸受11を有するXスライダ5は、Yスライダ3上をXガイド面4に沿って移動する。干渉計25a及びミラー27a、27bは、Xスライダ5のX凹空間部9に配置され、干渉計25b及びミラー27c、27dは、Yスライダ3のY凹空間部6に配置される。各凹空間部6,9は、それぞれ排気ホース15、16によって減圧される。
(もっと読む)
磁気軸受制御装置
【課題】回路規模を大きくすることなくリップル電流の発生を抑制する。
【解決手段】
のこぎり波発生回路33,43は、互いに180度の位相差を有する同期信号S20a,S20bに同期してのこぎり波信号S33,S43をそれぞれ発生する。電流制御サブ回路61は、のこぎり波信号S33に同期しかつ、コイルL1の電流指令値It1と電流検出値Id1との差がゼロになるように、トランジスタTr1,Tr2をオン/オフ制御する。電流制御サブ回路62は、のこぎり波信号S43に同期しかつ、コイルL2の電流指令値It2と電流検出値Id2との差がゼロになるように、トランジスタTr3,Tr4をオン/オフ制御する。
(もっと読む)
XYステージ
【課題】 ステージの高さを抑え、かつ安定した位置決精度を保証できるようにする。
【解決手段】 互いに対向するガイド溝11を持つ一対のガイドレール10をX軸方向に設ける。一対のガイドレール10の間に平板状のX軸スライダ20を設けて、ガイド溝11に沿ってX軸方向の移動が許容され、Y軸方向の動きが規制されるようにする。X軸スライダ20を囲むように略コ字型のY軸スライダ30を装着する。X軸スライダ20に対してX軸方向の動きが規制されてX軸スライダ20がX軸方向に移動するとそれに伴ってX軸方向に移動し、X軸スライダ20に対してY軸方向の動きが許容されて、X軸スライダ20に対してY軸方向に移動できるようにする。一対のガイドレールのガイド溝11とX軸スライダ20との間、及びX軸スライダ20とY軸スライダ30との間にガスを供給して、そのガス圧によってX軸スライダ20及びY軸スライダ30を支持する静圧ガス軸受40、50をそれぞれ設ける。
(もっと読む)
燃料電池用圧縮機
【課題】固有振動数の低下の原因となる回転部分の全長の長大化を生じることなしに、ラジアルフォイル軸受22、31により、電動モータ13の回転軸10をできるだけ低速で速やかに浮上させると共に前記浮上を安定して維持できる燃料電池用圧縮機6を提供する。
【解決手段】前記ラジアルフォイル軸受22、31を、電動モータ13のステータ12の、軸方向の両端より外側に設けると共に、前記ステータ12の軸方向内方に凹入させて設けた空間52、56内にも挿入させて配置した。
(もっと読む)
81 - 100 / 404
[ Back to top ]