
Fターム[3J552PA54]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 目的(一般) (9,045) | 制御精度の向上 (599)
Fターム[3J552PA54]の下位に属するFターム
オーバーシュート,アンダーシュート防止 (64)
ハンチング防止 (54)
無駄時間補正 (18)
Fターム[3J552PA54]に分類される特許
161 - 180 / 463
無段変速機の制御装置
【課題】車両停止時の変速の際や微速走行時において燃費の悪化を抑制しながら、無段変速機の変速比を最大変速比γmaxに確実に保持することが可能な制御を実現する。
【解決手段】車速が判定閾値B以下で、かつ、当該無段変速機の変速比が判定閾値A以上のときに、最大変速比判定条件が成立したと判定して、プライマリシーブ油圧の下限ガード処理を解除して、プライマリシーブ油圧を、通常制御時のプライマリ側油圧アクチュエータの油圧以下に下げる。このような制御により、車両停止時に無段変速機の変速比を確実に最大変速比γmaxに保持することができる。しかも、セカンダリシーブ油圧を上げることなく、変速比を最大変速比γmaxにすることができるので、燃費の向上をはかることができる。また、微速走行時に、変速比が増速しなくなり、駆動力不足による発進不良を回避することができる。
(もっと読む)
自動変速機の変速制御装置

【課題】ドライバの操作にばらつきがある場合であっても適切なダウンシフトを行う自動変速機の変速制御装置を提供する。
【解決手段】自動変速機20の変速制御を行う変速制御装置30を、車両の加速度を演算する加速度演算手段33,34と、加速度演算手段によって演算された加速度に基づいて変速判定値を演算する変速判定値演算手段36と、変速判定値演算手段によって演算された変速判定値を微分する変速判定値微分手段37と、変速判定値の微分値が閾値を超えた場合に自動変速機のダウンシフトを許可するとともに、変速判定値の微分値が閾値未満である場合にダウンシフトを禁止する変速制御手段39とを備える構成とする。
(もっと読む)
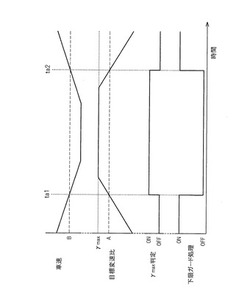
車両の制御装置および制御方法
【課題】無段変速機の変速制御においてオーバーシュートに起因した回転停滞の発生を抑制して、運転者の意図に応じた車両の挙動を応答性よく実現する。
【解決手段】ECUは、目標値NIN_T(1)を決定するステップ(S100)と、切換タイミングを決定するステップ(S102)と、プライマリプーリ回転数NINが目標値NIN_T(1)に収束する場合(S104にてYES)、目標値NIN_T(2)を決定するステップ(S106)と、最終目標値NIN_FTを決定するステップ(S108)と、変速制御を実行するステップ(S110)とを含む、プログラムを実行する。
(もっと読む)
車両用自動変速機の変速制御装置
【課題】プリシフトの予測精度を向上した車両用自動変速機の変速制御装置を提供することにある。
【解決手段】変速機制御ユニット100は、所定の変速段を達成しているときに変速機出力軸の回転数、または車速、またはアクセルペダルの踏み込み量のうち、少なくとも一つのパラメータを用いて次の変速段を予測する。そして、現在の変速段の達成のために使用されていない方のクラッチが連結された変速機入力軸と変速機出力軸とを、所定の同期噛合い機構によって選択的に連結することにより所定の変速段に待機せしめるプリシフト制御を行う。運転者の右折意思または左折意思を示す方向指示器の操作がなされた場合には、変速機制御ユニット100は、所定の同期噛合い機構を操作し、現在の変速段よりもダウンシフト側に待機せしめるプリシフト制御を行う。
(もっと読む)
車両の制御装置
【課題】本発明は、エンジンと、エンジンをアシストする駆動モータを備えた車両の制御装置において、運転者がイメージする加速度に適したエンジン音を演出して、運転者の満足度を向上できる車両の制御装置を提供することを目的とする。
【解決手段】後輪10aを駆動するエンジン11と、該エンジン11をトルクアシストする駆動モータ17とを備えたハイブリッド車両1の制御装置であって、後輪10aとエンジン11との動力伝達経路中に設けられたスリップ制御可能なロックアップクラッチ56及び歯車変速機構60の摩擦締結機構90と、ロックアップクラッチ56及び歯車変速機構60の摩擦締結機構90のスリップ量を制御するECU20とを備え、ECU20が、加速時における駆動モータ17によるモータアシスト量が大きいほどロックアップクラッチ56及び歯車変速機構60の摩擦締結機構90のスリップ量が大きくなるよう制御した。
(もっと読む)
車両用変速機の制御装置
【課題】車両用変速機の制御装置において、油圧センサの故障判定の精度を向上するとともに故障判定の機会を増やすことができる車両用変速機の制御装置を提供する。
【解決手段】ECUは、ユーザからの変速指示に基づいて要求された変速段への変速を開始し(ステップS12)、|Pm−Pa|を算出する(ステップS13)。|Pm−Pa|が判定閾値αthよりも小さいと判定するか(ステップS14でYes)、変速が完了したと判定するまで(ステップS15でYes)、|Pm−Pa|の算出処理(ステップS13)および|Pm−Pa|がαthよりも小さいか否かの判定処理(ステップS14)を行う。|Pm−Pa|がαthよりも大きいと判定して(ステップS14でNo)、変速が完了したと判定した場合(ステップS15でYes)、アキューム圧センサ214またはマスタ圧センサ216が異常であると判定する(ステップS16)。
(もっと読む)
自動変速機の制御装置
【課題】的確な登坂制御実行判定を実現できる自動変速機の制御装置を提供する。
【解決手段】コントローラ5は、あらかじめアクセル開度に応じた理想エンジントルク特性を記憶した理想エンジントルク特性記憶部21と、アクセル開度から理想エンジントルク特性を参照して得られた理想エンジントルクに基づいて、アクセル開度に応じた車両の理想加速度を算出する理想加速度算出部22と、車両の実加速度を算出する実加速度算出部23と、理想加速度と実加速度とに基づいて、登坂制御実行用パラメータを算出する登坂制御実行用パラメータ算出部24と、登坂制御実行用パラメータがあらかじめ設定した登坂制御実行判定閾値よりも大きい場合、登坂制御を実行させるように自動変速機を制御する変速制御部25と、を備える。
(もっと読む)
作業車の走行制御装置
【課題】走行用の駆動力(トルク)の不足を避けながら、エンジンに大きな負荷が掛からないようにすることができ、しかも、そのことを的確に行うことができる作業車の走行制御装置を提供する。
【解決手段】エンジンの動力が伝達される走行用の静油圧式無段変速装置7の可変容量型の油圧モータ7Mにおける容量変更用の操作部7Maが低速側に移動するのを高速側に移動操作する操作力にて保持する保持手段56と、保持手段56の操作力を変更調整する操作力調整手段58と、操作部7Maの位置を検出する位置検出手段89の検出情報に基づいて、操作部7Maを設定目標位置に維持させるように操作力調整手段58の作動を制御する制御手段79が、操作部7Maが設定目標位置よりも低速側に移動しても、設定上限値を超えて保持手段56の操作力を増加させない形態で操作力調整手段58の作動を制御するように構成されている作業車の走行制御装置。
(もっと読む)
流量制御弁の制御装置
【課題】作動油の供給元から供給先への流量および作動油の供給先から排出路への流量が実質的にゼロとなるヌル点を温度変化および経時変化に対応して精度高く推定する。
【解決手段】ECUは、ポンプ停止中であって(S100にてYES)、アクチュエータが駆動中ではなく(S102にてNO)、低下時間の計測が許可中であって(S104)、かつ、アキューム圧が予め定められた値A以下である場合に(S106にてYES)、計測を開始するステップ(S108)と、アキューム圧が予め定められた値B以下である場合に(S110にてYES)、計測された時間よりヌル点の補正を実施するステップ(S112)と、低下時間の計測を禁止するステップ(S114)とを含む、プログラムを実行する。
(もっと読む)
自動変速機の制御装置
【課題】変速開始点において推定した供給圧が実際の圧力よりも低い場合は、変速開始点で検出した入力トルクと供給圧とのデータの蓄積を行わないようにして、目標供給圧の信頼性を高める。
【解決手段】供給圧推定部40は変速開始点での変速機の変速状態と目標供給圧Pcとに基づき摩擦締結要素に供給されている供給圧Piを推定する。サンプルデータ記憶部41は変速開始点での入力トルクTiと供給圧Piとを記憶し順次更新する。目標供給圧算出部44は入力トルクTiに基づいて設定した基本供給圧Poを、サンプルデータ記憶部41に記憶されている入力トルクTiと供給圧Piとに基づいて設定した補正定数ac,bcで補正して目標供給圧Pcを設定する。データ更新判定処理部42は変速開始点以降の減速比εの変化が予め設定した判定値SL1,SL2の一方を超えた場合、今回の入力トルクTiと供給圧Piの蓄積を中止する。
(もっと読む)
電磁弁
【課題】コスト高を招くことなく、コンタミの侵入を防止することができる電磁弁を提供する。
【解決手段】ノズル31の鍔部32の鍔部端面33に、一端が鍔部32の外周面61に開口するとともに他端がノズル31の中央穴41の内周面62に開口する連通溝63を鍔部32の周方向に延設し、鍔部端面33を電磁部端面に面接した状態で中央穴41を外部に連通する呼吸路67を形成可能に構成する。連通溝63を外側直線部71と円弧部72と内側直線部73で構成し、円弧部72に第一浅溝部82と第二深溝部83と第三浅溝部84と第三深溝部91と第三浅溝部92を順に形成する。これにより、連通溝63に、各深溝部81,83,91,101で構成された段部を間隔をおいて複数設ける。
(もっと読む)
巻掛け伝動機構の油圧制御装置
【課題】可動シーブの油圧を封入するバルブのフェール中およびフェール解除後における変速精度の悪化を低減する巻掛け伝動装置の油圧制御装置を提供すること。
【解決手段】可動シーブ5aに給排される圧油を閉じ込める閉止弁10が固着した場合に、その時点における変速制御弁の指示流量と実流量との差を補正する学習値を保存する。この学習値を、閉止弁10の固着が解除された時点における変速制御弁の補正値に適用することによって、閉止弁10の固着解除後の変速精度を向上させることができ、燃費の悪化を低減することができる。また、閉止弁10が固着している場合であっても、学習が継続されるので、閉止弁10の固着解除処理中の変速精度の悪化を低減することができる。
(もっと読む)
車両の制御装置
【課題】内燃機関とトルクコンバータ付きの変速機とを備えた車両の制御装置に関し、停車中や低車速でも高い精度で内燃機関の目標トルク及び目標回転数を計算することができるようにする。
【解決手段】n22/T2とtとの関係で表されるトルクコンバータ特性Aと、n22/T2とCPとの関係で表されるトルクコンバータ特性Bとを予め求めて制御装置10に記憶しておく。T2の目標値とn2の計測値とからn22/T2の値を計算し、その値をトルクコンバータ特性Aに当てはめることでトルク比tの値が求められる。また、n22/T2の値をトルクコンバータ特性Bに当てはめることで容量係数CPの値が求められる。トルク比tの値が定まることで、トルク比tとT2の目標値とからT1の目標値が算出され、さらに容量係数CPの値が定まることで、トルク比tと容量係数CPとT2の目標値とからn1の目標値が算出される。
(もっと読む)
電動機械装置
【課題】 電磁弁だけ、あるいはTCUだけを交換しても、適正に補正が実行できる自動変速機の油圧制御装置の提供にある。
【解決手段】 出荷前に、TCU4から各電磁弁2に指示電流を与えて特性ズレを測定して補正電流値(ΔIc)を求め、TCU4のEEPROMに記憶する。また、出荷前にTCU4から各電磁弁2に指示電流を与えて特性ズレを測定し、それを制御側補正電流値(ΔItcu)として記憶する。また、補正電流値(ΔIc)から制御側補正電流値(ΔItcu)を差し引いて各電磁弁2毎の動作側補正電流値(ΔIsol)を求めて記憶する。そして、電磁弁2を交換する際は、交換後の動作側補正電流値(ΔIsol’)に入れ換えてΔIc’=ΔItcu+ΔIsol’に変更する。またTCU4を交換する際は、交換後の制御側補正電流値(ΔItcu’)に入れ換えてΔIc’=ΔItcu’+ΔIsolに変更する。
(もっと読む)
自動変速機の学習制御装置
【課題】クラッチツークラッチ変速に際して自動変速機の入力軸トルクが変化する状況となっても、nt吹きの発生を抑制することができる学習制御を実行可能な自動変速機の学習制御装置を提供する。
【解決手段】クラッチツークラッチ変速時に変速機入力軸回転数が上昇した場合、その上昇タイミングにおいてエンジントルクの増加があったか否かを判定する。そして、変速機入力軸回転数の上昇の開始がエンジントルクの増加に起因しない場合、上記変速機入力軸回転数の上昇は、クラッチのトルク容量不足であると判断し学習制御を実行する。変速機入力軸回転数の上昇の開始がエンジントルクの増加に起因する場合には学習制御を禁止する。
(もっと読む)
自動変速機の初期化装置。
【課題】電動駆動手段で変速操作を行う自動変速機の、変速操作の違和感や変速不良、誤変速を低コストで防止して生産効率を高められる初期化装置を提供する。
【解決手段】本発明に係る自動変速機の初期化装置は、自動変速機内に設けた基準面1Aに対して、シフト方向Aと直交するセレクト方向Bに軸線を向けて同セレクト方向に移動可能なシフト部材の一部が接触するまで第1の電動駆動手段701を作動し、基準面1Aとの接触後、シフト方向に移動することで複数の変速段のシフト操作を行う複数のシフトレール部材のうち、基準変速段を操作するシフトレール部材の目標シフトラグ部材に対して当該シフトラグに対応するアーム部材が接触するまで第1及び第2の電動駆動手段701,702を作動し、アーム部材52が目標シフトラグ部材42に接触した位置を、アーム部材52のセレクト方向Bでの原点位置とする。
(もっと読む)
自動変速機の制御装置
【課題】電動機の駆動開始直後のトルクを瞬時に補正することができ、コイル温度が変化しても駆動開始直後(過渡時)のギア動作を適切に補正することが可能となる変速機の制御装置を提供する。
【解決手段】ギアチェンジ終了判定手段と、電動機停止判定手段と、変速開始前の停止中の電動機に所定電圧を印加する状態と印加しない状態を所定間隔で交互に繰り返し前記電動機のコイル抵抗を推定するコイル抵抗推定手段を備え、前記ギアチェンジ終了判定手段と電動機停止判定手段とにより電動機が停止していると判断した場合に、変速開始前の電動機停止中に、前記コイル抵抗推定手段によって算出したコイル抵抗値に応じて変速開始後の前記電動機に印加する指令電圧の初期値を所定期間において補正するようにした。
(もっと読む)
自動変速機の制御装置
【課題】低μ路発進処理を行う自動変速機の制御装置にあって、低μ路発進処理の実行と中断が頻繁に繰り返されることに起因する運転者の違和感を軽減することのできる自動変速機の制御装置を提供する。
【解決手段】電子制御装置は、車両が低μ路を走行中であると低μ路判定がなされたことを条件に、低μ路発進処理を実行して自動変速機の発進変速段を2速に設定する。電子制御装置は、低μ路発進処理が開始されてからイグニッションスイッチがオフ操作されないうちは(ステップS220:NO)、同低μ路発進処理を継続する(ステップS240)。
(もっと読む)
トロイダル型無段変速機の変速制御装置
【課題】トロイダル型無段変速機における変速制御で必要とする制御ゲインの数を少なくする。
【解決手段】入力ディスク1と出力ディスク1との間にパワーローラ2が配置され、そのパワーローラ2を油圧サーボピストン5,6によって移動させてパワーローラ2を傾転させることにより変速を生じさせ、かつ油圧サーボピストン5,6に給排する油量を電流値に応じて制御する流量制御弁9,10を備え、パワーローラ2の目標位置と実際位置との偏差と制御ゲインに基づいて電流値を制御する変速制御装置において、入力回転数に応じて予め定められている制御ゲインKxを使用して流量指令値を求める流量指令値算出手段14と、前記油量と前記電流値との予め求められた関係を利用し、かつ前記流量指令値算出手段14によって求められた流量指令値に基づいて電流値を求める電流値算出手段18とを備えている。
(もっと読む)
制御装置及び変速制御方法
【課題】 運転者の意図を的確に把握し、変速装置を最適に制御することができる制御装置する。
【解決手段】 アクセル開度センサ23で測定されたアクセル開度の情報を入力する入力部11と、所定条件が成立すると変速装置を高変速側から低変速側にダウンシフトさせる変速制御において、この変速制御を終了させるか否かを判定する判定しきい値を、アクセル開度の変化率に基づいて変更する処理と、変更された判定しきい値と現在のアクセル開度とに基づいて、自動変速機50をダウンシフトさせている変速制御を終了させるか否かを判定する処理とを実行するマイコン12とを有している。
(もっと読む)
161 - 180 / 463
[ Back to top ]