
Fターム[3J552RB11]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 車両走行状態 (2,755) | 定速走行時(オートクルーズ) (92)
Fターム[3J552RB11]に分類される特許
1 - 20 / 92
Vベルト式無段変速機のベルト係脱許可判定装置
車両の走行制御装置
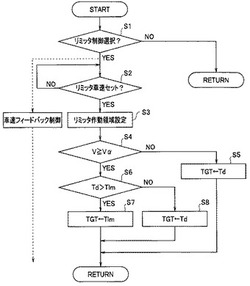
【課題】車速制限制御に切り換えられた際に、自車両の車速を制限車速に滑らかに収束させると共に、不自然な変速を防止する。
【解決手段】自車両の車速リミッタ作動領域に入っているか否かを調べ(S4)、リミッタ作動領域内に入った場合、ドライバのアクセル操作に基づくドライバ要求トルクTdとリミッタ制御のリミッタ要求トルクTlmとを比較し(S6)、Td>Tlmの場合、リミッタ要求トルクTlmを目標トルクTGTとして設定し(S7)、Td≦Tlmの場合、ドライバ要求トルクTdを目標トルクTGTとして設定し(S8)、自車両の車速をリミッタ車速に円滑に収束させる。また、このとき、クルーズ制御における仮想アクセル開度を用いてリミッタ制御時の変速を制御することで、不自然な変速を防止する。
(もっと読む)
変速制御装置

【課題】自動変速モード中に運転者によって手動変速モードの割り込み操作が行われた場合に、運転者の走行意思に沿って自動変速モードに復帰させる変速制御装置を提供する。
【解決手段】自動変速モード中に手動変速操作が行われた場合は手動変速モードに切り換え、手動変速操作後に自動変速モードに自動復帰する自動変速モード復帰手段を備える変速制御装置において、自動変速モード復帰手段は、自動変速モード中に、変速機のシフトアップ及びシフトダウンの手動変速操作を検出する手動操作検出手段と、手動変速操作が実行された時の車両の走行状態を判別する第1走行状態判別手段と、手動変速操作後の車両の走行状態を判別する第2走行状態判別手段と、変速機のシフトアップ及びシフトダウンの手動変速操作と、手動変速操作時及び手動変速操作後の走行状態とから、自動変速モードへの自動復帰の状態を切り換える。
(もっと読む)
車両用変速制御システム
【課題】簡単な操作で所望の定速走行が実現する車両用変速制御システムを簡単な構成で提供する。
【解決手段】変速制御システムは、無段変速装置20の変速値を設定する変速制御部62と、無段変速装置20に対する変速指令を変速制御部62に与える変速操作具と、変速制御部62に対して、定速モード時の変速値である定速モード変速値を変更する変更指令、定速モードへの移行を指令する移行指令、定速モードからの離脱を指令する離脱指令を与える定速走行操作手段と、定速走行操作手段による移行指令に基づいて記憶部から読み込んだ定速モード変速値での定速モードを変速制御部に実行させる定速走行管理部63を備えている。
(もっと読む)
無段変速機の挟圧制御装置
【課題】 ベルト式無段変速機の無端ベルトのスリップを防止しながら動力伝達効率の向上を図る。
【解決手段】 無端ベルトのスリップを防止するための両プーリの何れか一方の必要軸推力を求め、推定したトルク比と目標トルク比との偏差に基づく補正係数により必要軸推力を補正し、補正した必要軸推力に基づいて何れか一方のプーリの側圧を制御するので、ベルト式無段変速機の定常運転時には、トルク比のフィードバックにより必要軸推力の推定値の誤差が吸収されてプーリ側圧の制御精度が向上するだけでなく、ベルト式無段変速機の伝達トルクの変化時のようにプーリ側圧を瞬時に応答させる必要が生じた場合には、フィードフォワード制御により必要軸推力が瞬時に応答することで無端ベルトのスリップを防止することができ、制御精度および制御応答性の両立が可能になる。
(もっと読む)
車両の変速制御装置
【課題】クルーズ時におけるエンジンの低Ne化の制御中において、車両に振動が発生した場合に、迅速に共振から回避することができ、しかも、車速の変動を抑えることができる車両の変速制御装置を提供する。
【解決手段】クルーズ走行状態と判定されると、目標エンジン回転数Npを所定のクルーズ回転数に設定すると共に、車速Vが一定となる関係で、無段変速機106により、変速比を小さくしつつ、エンジン回転数Neを目標エンジン回転数Npに向けて低下させるエンジン回転数低下制御部236と、エンジン回転数の低下制御中に、振動抑制制御判定部238により、車体振動値Saが所定値Sth以上であると判定したときに、無段変速機106により、エンジン回転数Neを制御して、車体振動値Saが所定値Sth未満になるように制御する第1振動抑制制御部240及び第2振動抑制制御部242とを有する。
(もっと読む)
無段変速機の制御装置
【課題】増加分(余裕分)を走行状態に応じて持ち替えることで、動力伝達要素の滑りを防止すると共に、プーリとの間の磨耗を防止し、プーリの小型・軽量化を可能にした無段変速機の制御装置を提供する。
【解決手段】理論トルクTiを算出し(S12)、それが増加するほど増加するように設定された所定トルク1,2,3のいずれかを算出された理論トルクに基づいて選択して第1余裕トルクT1を算出し(S14からS22)、理論トルクに所定の係数(K2)を乗じた値が余裕トルク下限値以上となるよう第2余裕トルクT2を算出し(S44)、安定走行状態にあるか否か判定し(S28からS32)、第1余裕トルクと第2余裕トルクの小さい方を選択し、選択された余裕トルクと理論トルクを加算して保証トルクTxを算出し(S46からS50)、それに基づいて作動油の供給を制御する(S62)。
(もっと読む)
車両の駆動制御装置
【課題】駆動側が遠心式のベルト式無段変速機と電子スロットル部とを備える構成で、電子スロットル部のモードに合わせた適切なドリブン推力を設定し、燃料の節約を図ることができる車両の駆動制御装置を提供する。
【解決手段】電子スロットル制御部31は、選択された運転モードに応じて吸気絞り弁21の開度を制御し、従動側接圧力可変部36は、所定車速を越えると、又は、スロットルグリップ26の開度が一定の状態が継続すると、従動プーリー51とベルト45との接圧力を低減させるようにした。
(もっと読む)
運転支援装置
【課題】運転支援装置に関し、周囲の走行環境の変化に応じた協調的な安定走行を実現する。
【解決手段】変速機19を搭載した車両の運転支援装置において、変速比に応じた駆動輪の最大トルクと、走行状態に応じて駆動輪に要求される要求トルクとを演算する演算手段3を設ける。
また、車両の周囲の他車両の走行状況を検出する検出手段2を設ける。
さらに、演算手段3で演算された最大トルク及び要求トルクと、検出手段2で検出された走行状況とに基づき、変速比の変更の要否を判定する判定手段4を設ける。
(もっと読む)
作業車両
【課題】オペレータに負担を掛けないで、負荷の大きい作業をしている場合は、オートクルーズ機能が解除できるオートクルーズ装置を搭載した作業車両の提供である。
【解決手段】エンジン3の回転数を一定の回転数に設定するアクセルレバー101と、踏み込み量に対応して静油圧式変速装置7のトラニオン軸30の回動角度をトラニオン軸駆動モータ66を介して調整するHSTペダル9とを設けた作業車両のオートクルーズ走行時に、主変速クラッチセンサ63による主変速が低速側で、副変速レバー12の副変速が高速側である場合は、エンジン回転数が前記一定の回転数から所定値以上低下するとオートクルーズ機能を解除するオートクルーズ解除機能を有する制御装置100を備える。エンジン回転数が低下したらオートクルーズ走行を解除することで、高速における一定車速による高負荷作業をしないことからエンジンストップ等のトラブルを回避できる。
(もっと読む)
自動変速機の制御装置
【課題】変速が繰り返される運転状態が発生することを抑制する自動変速機の制御装置を提供する。
【解決手段】クルーズ制御手段(6)は、クルーズ制御中であると判定した場合は、クルーズ制御中に任意の一定速度に維持する燃料噴射量とエンジン回転数から擬似的な吸気量を算出し、算出された擬似的な吸気量とエンジン回転数に基づく変速マップを参照して変速機(4)を制御し、変速マップによって変速機(4)を制御しているときに、シフトビジーが発生したと判定した場合は、エンジン回転数が高回転側でシフトアップが行われるように変速マップを補正する。
(もっと読む)
車両制御装置
【課題】力行可能な電動機を備えた車両において、燃費を向上できる車両制御装置を提供すること。
【解決手段】エンジンと、予め定められた所定領域R1内の動作点で動作することができる電動機と、エンジンおよび電動機と車両の駆動輪とを接続する変速機と、を備え、変速機を所定の変速比に変速させる所定変速制御を実行可能であり、所定の変速比は、車両に要求される要求出力に対応する電動機の動作点を所定領域内の動作点P1とする変速比、あるいは要求出力に対応する電動機の動作点を所定領域の近傍の動作点P11とする変速比である。
(もっと読む)
車両用自動変速機の制御装置
【課題】車両走行中であってもソレノイドバルブの学習を実施することができる車両用自動変速機の制御装置を提供する。
【解決手段】セレクトソレノイドバルブ88およびシフトソレノイドバルブ90に供給されるマスタ圧Pmを略零の状態に制御した状態で、セレクトソレノイドバルブ88のソレノイド124およびシフトソレノイドバルブ90のソレノイド140に基準電流cを出力し、その基準電流cと実際に流された計測実電流dとに基づいて補正ゲインKを算出するため、走行中に基準電流cが出力されてもセレクトアクチュエータ76およびシフトアクチュエータ78が作動することがないので、車両走行中であっても補正ゲインKを算出することができる。
(もっと読む)
オートクルーズ制御装置
【課題】高い加速性能を必要としない状況では極力低いエンジン回転数での走行を行うことで、低燃費で経済的な巡航走行を行うことのできるオートクルーズ制御装置を提供すること。
【解決手段】オートクルーズ走行中の車間距離制御実行時(S1)には、車両負荷度、エンジン出力、シフトアップ後のエンジン回転数の判定を行い(S2、S4、S5)、高い加速度を必要としない前走車追従時にはシフトアップを実施する(S6)。
(もっと読む)
車両の定車速制御装置
【課題】定車速走行中にクラッチを踏むこと無くギヤがニュートラル位置になってしまった場合や、ギヤがニュートラル位置にある状態で定車速走行制御がセットされた場合におけるエンジン回転数の急激な上昇を防止することが出来る車両の定車速制御装置の提供。
【解決手段】車両のエンジン回転数を計測するエンジン回転数検出手段(1)と、車速を計測するエ車速検出手段(2)と、定車速走行を行なうか否かを決定する制御装置(10)を備え、前記制御装置(10)は、エンジン回転数と車速からギヤ比を決定し、決定されたギヤ比と定車速走行におけるギヤ比の範囲を比較して、車両に定車速走行を行なわせるか否かを決定する機能を有している。
(もっと読む)
自動変速装置
【課題】本発明は、走行装置の自動変速装置において、トロイダル変速機構を用いた自動変速装置の構成とし、バリエータの傾倒角変更を自動制御して滑らかな自動変速が行える自動変速装置を提供することが課題である。
【解決手段】入力ディスク4b,4bと出力ディスク4a,4aの間に設けるバリエータ5の傾倒角を変更することで変速伝動するトロイダル変速機構4と、遊星機構61と、高・低クラッチ30を設けたミッションケース1の自動変速装置において、設定速度変化率から算出する設定車速と、車速センサ150で検出する実走行車速を比較し、実走行車速が設定車速を越えるとバリエータ5の傾倒角変更出力を低下させる出力抑制手段を設けたことを特徴とする自動変速装置の構成とする。
(もっと読む)
自動車の自動変速機の制御方法
【課題】道路勾配に応じて簡単な操作で運転プログラムが割当てられる、クルーズコントロールを備えた自動車の制御方法を提供する。
【解決手段】クルーズコントロールを備えた自動車の自動変速機の制御方法は、変速機制御がクルーズコントロールのもとで外的影響、特に道路勾配に関連する別個の運転プログラムに切換えるものである。この運転プログラムは外的影響に応じて更新される。状態「設定」で別個の運転プログラムに切換えられ、状態「復帰」で運転プログラムが直ちに又は制御状態「設定」に到達した後に初めて作動されるように、変速機制御を調整することができる。
(もっと読む)
エンジンと発電機との間のトランスミッションのための定常状態と過渡部の制御
【課題】エンジンで駆動される発電機の一定速度での駆動を提供する。
【解決手段】可変出力を所望の速度値を有する入力に変換するためのシステムであって、システムは、トランスミッションを含む、第1の速度Ve、第2の速度Vgenおよび入力に対するパワー需要(Pdem)に対応するデータを生成するものである比率設定ポイントコントローラは、データを受信し、利用可能パワーPav、システムの安定性レベルS、U1、U2、第1の速度Veに対する所望の値、およびトランスミッション比率に対する所望の値と変化の速度を計算する。比率コントローラは、トランスミッションを作動させることで、トランスミッション比率を、変化の所望の速度に従って所望の値に変える。速度コントローラは、第1の速度Veを、第2の速度Vgenが所望の速度値に対応するまで変化させる。
(もっと読む)
移動農機
【課題】使用頻度の高いエンジンの高回転域で、安定した作業速度を確保して作業の高能率化を図ることができるようにした移動農機を提供しようとするものである。
【解決手段】エンジン2の出力回転数を変更するアクセルペダル87と、前記アクセルペダル87の操作位置を検出するアクセルセンサ92を備え、前記アクセルセンサ92の出力に基づき、アクセルセンサ92の出力に対応するエンジン2回転数が、エンジン2の出力回転数として得られるように、前記出力回転数を制御するように構成する移動農機において、前記出力回転数の上限を設定する上限設定手段30,99,100を備え、前記アクセルセンサ92の出力に対応するエンジン2回転数が、前記上限設定手段30,99,100により設定した上限回転数よりも高い場合には、前記上限回転数が前記出力回転数として得られように、前記出力回転数を制御するように構成したものである。
(もっと読む)
車速制御装置
【課題】未知の負荷変動に対する応答性に優れた車速制御装置を提供すること。
【解決手段】目標駆動力(目標エンジン出力PeT )が、典型的なエンジン回転速度フィードバック制御にカスケードされた車速フィードバックから演算される。目標車速VT および実車速VR の偏差に基づく第1のフィードバック量FD1と、要求車速VS 及び実車速VR の偏差に基づく第2のフィードバック量FD2との加算値に基づいて、より大きな目標駆動力が演算される。第2のフィードバック量FD2は、要求される応答を実現するフィルタ(一次応答モデル、レートリミッタ等)によって要求車速を演算し、次いで、その要求車速と実車速を比較することで得られる。未知の負荷変動に対してエンジン出力の非常に迅速な補償を自動的に行い、車速を精度良く制御する。
(もっと読む)
1 - 20 / 92
[ Back to top ]