
Fターム[3J552VD03]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 運転者情報,操作情報 (2,942) | アクセル操作 (1,839) | 操作量 (1,572) | 全開(キックダウンスイッチ) (38)
Fターム[3J552VD03]に分類される特許
1 - 20 / 38
車両の制御装置
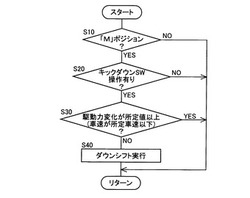
【課題】キックダウン操作に伴う自動変速機のダウンシフトに際して、ドライバに与える違和感を抑制する。
【解決手段】車両10において、車速Vが上昇する程、自動変速機18の各ギヤ段における最大駆動力Fmaxが減少傾向にある為に、車速Vが低い程、ダウンシフト時の駆動力変化(駆動力差ΔT)が大きくなることに対して、キックダウン操作時の車速Vが自動変速機18の現在のギヤ段毎に定められた所定車速V’以下である場合には、そのキックダウン操作に伴うダウンシフトが禁止されるので、ドライバに違和感を与える可能性がある程に駆動力変化が大きくなるようなダウンシフトが抑制される。
(もっと読む)
デュアルクラッチ式自動変速機

【課題】エンジン回転数吹き上げ中の駆動力が変速開始時点の駆動力を下回らないような目標エンジン回転数変化速度となるようにクラッチトルクを制御するデュアルクラッチ式自動変速機を提供する。
【解決手段】クラッチの係合制御を行う変速制御装置が、パワーオンダウン変速開始時点での原動機の出力トルクを変速開始時トルクとして演算する変速開始時トルク演算部と、原動機の現出力トルクから変速開始時トルクを減算した差を原動機のイナーシャトルクで除算して原動機の目標回転増速度を演算する目標回転増速度演算部と、原動機の回転数が低速段側の入力軸の回転数に同期するまでの間は、原動機の回転増速度が目標回転増速度以下となるように、高速段側のクラッチの伝達トルクを制御し、原動機の回転数が前記低速段側の入力軸の回転数に同期すると、低速段側の入力軸に対応する低速段側のクラッチを接続状態にするパワーオンダウン変速制御部とを備える。
(もっと読む)
車両の制御装置
【課題】キックダウンスイッチのオン故障をより的確に判定することのできる車両の制御装置を提供する。
【解決手段】アクセルポジションセンサーの出力電圧VAが下限ガード学習値未満であり(S102:YES)、かつキックダウンスイッチがオン(S103:YES)の状態が所定時間継続したとき(S104:YES)に、キックダウンスイッチのオン故障と判定する(S105)ことで、キックダウンスイッチのオン故障をより確実に判定できるようにした。
(もっと読む)
車両の駆動力制御装置
【課題】マニュアル変速モードにおいて、ドライバの選択した変速段を所定に維持しつつ、必要に応じてドライバの意思に合致した違和感のない自動変速を行うことができる車両の駆動力制御装置を提供する。
【解決手段】T/M_ECU20は、プライマリ回転数Npがキックダウン許可回転数Nth以下であり、且つ、アクセルペダル踏込量θaccがキックダウン許可踏込量θaccth以上である場合には、マニュアル変速モードの選択時においても、ドライバのアクセル操作から加速意思を判断して変速段を低速段側にキックダウンさせる。この場合において、駆動力特性のモードM毎にキックダウン許可回転数Nthを異ならせ、プライマリ回転数Npに基づいてキックダウンの自動実行を許可する回転数領域を、アクセル操作に対する応答性が高いモードMであるほど狭い領域に設定する。
(もっと読む)
車両用無段変速機の制御装置
【課題】複数の制御が混在する場合に、制御構造を簡素化する。
【解決手段】複数の変速制御態様(制御状態、制御モード)が1つの変数(状態S)を用いて表され、段階的に目標入力軸回転速度NIN*を変化させる段階的制御と連続的に目標入力軸回転速度NIN*を変化させる連続的制御とがその状態Sに基づいて選別されるので、例えば複数の変速制御態様が混在しても、前記段階的制御と前記連続的制御とが選別されて各々実行される為、制御構造が簡素化される。
(もっと読む)
建設機械及びその制御方法
【課題】満充電時でも発進し極低速で走行可能な建設機械及びその制御方法を提供する。
【解決手段】蓄電器14に接続された電動発電機11と、エンジン10とを備え、それらの出力が遊星ギヤ装置により合成されて駆動輪20へと伝達される建設機械1において、遊星ギヤ装置は、エンジン10の運転中に駆動輪20側への出力回転数が零になる場合に電動発電機11が逆回転するように構成し、遊星ギヤ装置と駆動輪20との間には変速機12を介設する。アクセル開度、車速、蓄電器14の蓄電量等に基づいてエンジン10、電動発電機11及び変速機12を制御する制御装置2を備える。蓄電器14の蓄電量が所定量以上に多く、停車乃至極低速状態でアクセルが踏み込まれていれば、制御装置2により、変速機12の前後進を進行方向と逆向きに切替えるとともに、電動発電機11に逆トルクを発生させることによって力行状態とする。
(もっと読む)
変速機の制御装置
【課題】 同期装置のスリーブのチャンファがギヤのドグ歯に係合する際のショックや異音を低減する。
【解決手段】 変速機の同期装置は、回転軸に結合されたハブと、ハブに相対回転不能かつ軸方向摺動可能に支持されてアクチュエータで駆動されるスリーブと、スリーブおよび前記ギヤ間に配置されたブロッキングリングとを備える。アクチュエータでスリーブを駆動し、スリーブのチャンファをブロッキングリングのチャンファに係合させることで回転軸およびギヤの回転を同期させた後に、スリーブのチャンファをギヤのドグ歯に係合させてギヤを回転軸に結合する。時刻gにスリーブチャンファがギヤのドグ歯に係合するときのアクチュエータの推力Fc1を、時刻e′にスリーブのチャンファがブロッキングリングのチャンファに係合完了するときのアクチュエータの推力Fb4よりも小さく設定し、スリーブのチャンファがギヤのドグ歯に係合するときのショックや異音を低減する。
(もっと読む)
無段変速機及びその制御方法
【課題】副変速機構の変速段の変更を伴うキックダウン変速であっても、スルー変速比を速やかに変速比大側に変化させ、駆動力の立ち上がり遅れ、変速フィーリングの悪化を防止する。
【解決手段】変速機コントローラ12は、副変速機構30の変速段を変更する場合、スルー変速比が目標スルー変速比となるように、副変速機構30の変速比を変化させつつ副変速機構30の変速比の変化方向と逆の方向にバリエータ20の変速比を変化させる協調変速を行う。しかしながら、アクセルペダルが踏み込まれたことで2速から1速への副変速機構30の変速段の変更を伴うキックダウン変速(2速キックダウン変速)が行われるときには、変速機コントローラ12は、協調変速に代えて、スルー変速比と目標スルー変速比のずれを許容しつつ副変速機構30の変速段を協調変速のときよりも速い速度で2速から1速に変更する非協調変速を行う。
(もっと読む)
自動変速機の変速制御装置および変速制御方法
【課題】運転者の要求する駆動力のより早い実現と、駆動トルク中断を回避したスムーズな変速を両立できる制御装置および制御方法を提案することにある。
【解決手段】アクセルオフ状態からのキックダウンのように、運転者が早急な加速を要求している場合は、摩擦伝達機構を解放して、駆動力源の動力の出力軸への伝達を一旦遮断状態としたのち、目的とする変速段の摩擦伝達機構を締結する。その他の変速の場合は、トルクを伝達していた摩擦伝達機構を徐々に解放しながら、次変速段の摩擦伝達機構を徐々に締結する。
(もっと読む)
自動変速機の変速制御装置
【課題】変速段の変速時における変速の応答性を確保できる自動変速機の変速制御装置を提供すること。
【解決手段】変速段の変速時に、変速前の変速段が2つの摩擦係合要素40を係合することにより形成されている場合に、2つの摩擦係合要素40のうち一方を解放し、他方を係合することによって形成される他の変速段を変速時の候補となる変速段である初期判断候補変速段とし、初期判断候補変速段に変速する際に解放する摩擦係合要素40と同じ摩擦係合要素40を解放し、初期判断候補変速段に変速する際に係合する摩擦係合要素40とは異なる摩擦係合要素40を係合することにより形成される変速段であり、且つ、変速前の変速段に対する変速比の変化する方向が同じ方向で、初期判断候補変速段とは変速比が異なる変速段を追加候補変速段とし、初期判断候補変速段と追加候補変速段とが存在する場合に、これらの変速段のうちより適切な変速段に変速する制御を行う。
(もっと読む)
自動変速機の変速制御装置
【課題】4係合要素のつかみ替えによる変速のときの変速ショックを防ぎながら、迅速な変速を実現する。
【解決手段】自動変速機が、第1の変速段(6速段)から第2の変速段(3速段)への変速のときに、4つの係合要素の作動を必要とするものにおいて、変速制御装置は、第1の係合要素B−1の解放を開始させた後に第2の係合要素C−2の解放を開始させ、第3の係合要素C−1の係合を完了させた後に第4の係合要素C−3の係合を完了させ、第3の係合要素C−1の係合を完了させる前に第2の係合要素C−2の解放を開始させる変速制御手段を有する。
(もっと読む)
車両の駆動装置の制御装置
【課題】車速制限手段による車速制限制御にキックダウンスイッチによるダウン変速がオーバーライドして実行される場合においても、加速応答性やドライバビリティの良好な車両の駆動装置の制御装置を提供する。
【解決手段】オーバーライド制御実行手段136により、車速制限手段134による車速制限制御の実行中に(S1)キックダウン判定手段132によりダウン変速の実行が判断され(S2)、車速制限制御の実行が中止されてダウン変速が実行される場合において、目標回転速度変化設定手段156(S3)により、オーバーライド制御実行手段136によらずキックダウンによるダウン変速が実行される場合とは異なる無段変速機18の入力軸回転速度の目標値NIN*の過渡変化NIN*OR(t)が設定され、目標値に追従するように制御される(S4)。
(もっと読む)
複数の伝達経路を有する変速機及びその制御方法
【課題】無段変速経路と直結駆動経路を並列に有する変速機において伝達経路の切換え応答性を向上させる。
【解決手段】変速機コントローラ300は、直結駆動経路が用いられている間、切換え機構130により直結駆動経路から無段変速経路に切り換えられることが予定されている車両の走行状態に基づいて無段変速機構140の待機変速比を設定し、無段変速機構140の変速比を待機変速比に制御する。
(もっと読む)
制御装置及び変速制御方法
【課題】 運転者の意図を的確に把握し、変速装置を最適に制御することができる制御装置する。
【解決手段】 アクセル開度センサ23で測定されたアクセル開度の情報を入力する入力部11と、所定条件が成立すると変速装置を高変速側から低変速側にダウンシフトさせる変速制御において、この変速制御を終了させるか否かを判定する判定しきい値を、アクセル開度の変化率に基づいて変更する処理と、変更された判定しきい値と現在のアクセル開度とに基づいて、自動変速機50をダウンシフトさせている変速制御を終了させるか否かを判定する処理とを実行するマイコン12とを有している。
(もっと読む)
車両の駆動制御装置
【課題】簡単な制御で加速フィーリングを向上することのできる車両の駆動制御装置を提供すること。
【解決手段】キックダウンの開始のときに、クラッチ4を半クラッチ状態としてクラッチ4の伝達トルクを低下させる。車両駆動トルクが落ち込まずに最適な加速特性が得られるように、クラッチ4の伝達トルクの制御に基づいて、CVT5の入力トルクを制御する。CVT5の変速比を厳密に制御する必要がない。クラッチ4の滑り率が例えば5%以下の正の値をとるように、CVT5の変速比を制御すれば十分であり、CVT5の伝達トルクを厳密に制御する必要がない。
(もっと読む)
ハイブリッド車両の制御装置
【課題】マルチモードタイプのハイブリッド車両において、現在の変速段よりも2つ以上離れた変速段へ変速を行う場合に、変速時間を短縮する。
【解決手段】ハイブリッド車両の制御装置は、内燃機関及びモータジェネレータを有し、2つ以上の係合要素における係合と解放とを切り替えることで3つ以上の変速段を実現すると共に、2つ以上の係合要素を同時係合状態にして変速段の切り替えを行う。変速制御手段は、現在の変速段よりも2つ以上離れた変速段へ変速する場合に、出力軸に動力を伝えない状態にする制御、及びモータジェネレータに対する回転数制御を行ってから、2つ以上離れた変速段へ直接切り替える。つまり、2つ以上の係合要素を解放してニュートラル状態にしてから、要求の変速段へ一気に切り替える制御を行う。これにより、変速開始から変速完了までの時間を効果的に短縮することができる。
(もっと読む)
車両の制御装置
【課題】自動変速機の係合要素の係合油圧の学習がダウンシフト時に良好に行なわれる車両の制御装置を提供する。
【解決手段】車両の制御装置は、複数の変速段を減速側にシフトさせるダウンシフト指示を入力するための入力部であるシフトレバー8004と、入力部からのダウンシフト指示に応じて自動変速機の変速を制御するECU8000とを備える。ECU8000は、ダウンシフト指示に応じて原動機の出力を増大させ、複数の係合要素のうちの第1の係合要素の係合油圧を制御パラメータに基づいて変速を進行させ、原動機の出力を減少させ、変速の進行度合いに基づいて制御パラメータを学習する。
(もっと読む)
車両の制御装置
【課題】リニアシフト制御を実行する車両の制御装置において、キックダウン操作時のドライバビリティを確保することが可能な制御を実現する。
【解決手段】アクセルペダルの操作量から加速を判定したときに、その加速判定時の車速を起点に加速用目標回転数ninlineを決定してリニアシフト制御を実行する(ST1〜ST3)。加速判定後、キックダウンスイッチがONとなったときには、加速用目標回転数を決定する車速を読み替えて、キックダウンスイッチON時の車速を起点に加速用目標回転数ninlineを決定してリニアシフト制御を実行する(ST4〜ST5)。このようにキックダウンスイッチON時に加速用目標回転数を決定する起点を読み替えることにより、キックダウンスイッチON時の到達回転数を常に最適回転数(最高出力回転数)に制御することが可能になり、ドライバビリティを向上させることができる。
(もっと読む)
車両の変速制御装置
【課題】内燃機関の出力変化が生じ得る場合に変速装置の耐久性低下を抑制する。
【解決手段】車両10は、変速装置としてCVT300を搭載する。また、車両10はFFVであり、エンジン200は、エタノール濃度DEが可変なエタノール混合燃料を使用可能に構成される。CVT300には、入力軸回転速度NINの上限を規定するWOTガード値NINWOTが車速Vに対応付けられる形で設定されている。このWOTガード値NINWOTは、WOT変速線としてECU100のROMに格納されたWOT変速線マップMP04に設定されている。ここで、WOT変速線は、乖離点に相当する車速V及び入力軸回転速度NINにおいて最大変速比γmaxを表す最大変速線からより低変速比側に乖離するが、この乖離点は、燃料中のエタノール濃度DEが高くなる程低車速且つ低入力軸回転速度側にシフトするよう設定される。
(もっと読む)
無段変速機及び鞍乗型車両
【課題】キックダウンが実行されている場合は、減速後、再加速時に、不必要にエンジンが吹き上がり、スムーズな加速感が得られない場合がある。
【解決手段】キックダウンモードでの制御中に、スロットル全閉後に加速される場合において、再加速時における制御目標値の制限値400をLow側に超えないように制御目標値を設定する。これにより、エンジンが吹き上がるのを防止できる。
(もっと読む)
1 - 20 / 38
[ Back to top ]