
Fターム[3K039AA08]の内容
車両の外部照明装置、信号 (9,386) | 共通 (1,843) | 回路 (1,314) | デジタル回路 (364) | マイコン利用 (335)
Fターム[3K039AA08]に分類される特許
41 - 60 / 335
前照灯配光制御装置
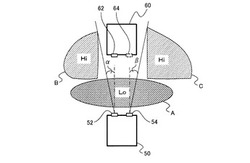
【課題】前方車両の一対のランプのうち片方が点灯していない場合であっても、前方車両の運転者を幻惑しないような前照灯の照射方向の制御を行う前照灯配光制御装置を提供する。
【解決手段】自車両50前方の画像を取得し、取得画像から前方車両60画像を抽出すとともに、レーダで、自車両50から前方車両60までの距離を取得する。取得した距離が所定の値より小さい場合に、抽出した前方車両画像から前方車両のランプ62,64を抽出し、抽出したランプ62,64が両灯点灯状態か片灯点灯状態かを判定する。前方車両のランプが両灯点灯状態であると判定した場合は、自車両50の前照灯52,54の照射領域内において、前方車両のランプ62.64を含む領域を照射しないように遮蔽領域を設定し、片灯点灯状態であると判定した場合には、遮蔽領域を、両灯点灯状態であると判定した場合の遮蔽領域よりも左右に広いマージン角α、βを持たせて設定する。
(もっと読む)
撮像装置及びこれを備えた物体検出装置、並びに、光学フィルタ及びその製造方法

【課題】光量が大きく異なっている複数の光源体をより短い時間間隔で連続して検出することを課題とする。
【解決手段】撮像領域内に存在する物体からの光を、光学フィルタを介して、受光素子(撮像画素a,b,c,・・・)が2次元配置された画素アレイで構成された画像センサにより受光することで、撮像領域内を撮像する撮像装置において、上記光学フィルタは、透過率が低い光透過領域(撮像画素b,d,e,gに対応したフィルタ領域)と透過率が高い光透過領域(撮像画素a,c,f,hに対応したフィルタ領域)が、撮像画素単位で、上記画素アレイの2次元方向へ交互に配置されている透過率調整層を有する。
(もっと読む)
ライト検出装置、ライト検出プログラム、およびライト制御装置
【課題】撮像画像中から他車両のライトを検出するライト検出装置において、車両のライトに類似する特徴を有する光源を識別し、車両のライトを良好に検出する。
【解決手段】ライト制御システム1においては、自車両の周囲を撮像した撮像画像を取得し(S110)、撮像画像中の光源を抽出する(S120)。そして撮像画像中を複数に区分した領域毎に他車両が存在する確度が設定された領域確度マップに基づいて、該光源毎に光源が他車両のライトである確度を表す領域確度を演算する(S150)。また各光源における形状を含む特徴量が車両のライトが有する特徴量と一致する確度に応じて、各光源が他車両のライトである確度を表す特徴確度を演算し(S150)、各光源に対して領域確度および特徴確度に基づく最終確度を演算し、予め設定された閾値以上となる最終確度を有する光源が他車両のライトである旨を出力する(S150,S190)。
(もっと読む)
ヘッドライトのエルボー点検出方法
【課題】 明確なカットオフラインを検出することが困難なヘッドライトについても、エルボー点を精度良く検出することができる方法を提供する。
【解決手段】 ヘッドライトから照射される照射光の配光パターンを撮像して配光画像を得て、前記配光画像の照度を所定軸方向に沿って微分処理を行い、前記配光画像の照度の微分値の分布である照度微分値分布を求め、前記照度微分値分布に基づいてエルボー点を検出する。
(もっと読む)
ヘッドランプの配光制御手段
【課題】前方への配光を制御して対向車両へのビームをマスクすることにより対向車両の運転者に眩惑を与えないようにするとともに、より重要な領域を運転者に注視させることが可能なようにヘッドランプの配光を制御する。
【解決手段】対向車両の相対距離が第1所定値以上では、対向車両の領域が照射制限されると共に、少なくとも対向車両よりも対向車線側が照射される配光パターンを照射させ、相対距離が、第1所定値未満かつ第2所定値以上では、対向車両の領域及び前記対向車両よりも対向車線側が照射制限された配光パターンを照射させ、相対距離が、第2所定値未満では、対向車両に対する照射制限が解除された配光パターンを照射させる。
(もっと読む)
オートライト制御装置
【課題】ライトが点灯不要時に点灯することを抑制可能なオートライト制御装置を提供する。
【解決手段】オートライト制御装置は、車外を照らすライト、車外の照度を検出する照度センサ、照度センサの出力に基づきライトを点灯するライトECU、および、車両前方障害物と車両との距離Bを検出する障害物距離センサを備える。ライトECUは、ライトが消灯している状態で、障害物距離センサの検出した距離Bが所定の距離B1よりも近い場合(S3:YES)、ライトの点灯を抑制する点灯抑制制御(S7)を行う。これにより、車両の停止に伴い、運転者が運転を終了することからライトの点灯を不要と感じるとき、ライトの点灯が抑制される。
(もっと読む)
車載ヘッドランプの光軸制御装置
【課題】車載ヘッドランプの光軸制御装置に関し、光軸補正を行うのに適した走行状態を高い精度で判別する。
【解決手段】車載ヘッドランプ5の光軸角度を上下方向に調整する調整手段6と、駆動輪に作用する駆動トルクTdを演算する駆動トルク演算手段2bと、車両10の走行時の抵抗トルクTrを演算する抵抗トルク演算手段2cとを備える。また、駆動トルクTd及び抵抗トルクTrに基づき、車両が静走行状態であるか又は動走行状態であるかを判別する判別手段3を備える。さらに、判別手段3で車両10が静走行状態であると判別されたときに調整手段6による光軸角度の調整を許可し、動走行状態であると判別されたときに調整を禁止する制御手段4を備える。
(もっと読む)
車載ヘッドランプの光軸制御装置
【課題】車載ヘッドランプの光軸制御装置に関し、光軸補正を行うのに適した走行状態を高い精度で判別する。
【解決手段】車載ヘッドランプ5の光軸角度を上下方向に調整する調整手段6と、駆動輪に作用する駆動トルクTdを演算する駆動トルク演算手段2bとを備える。また、車両10の走行時の抵抗トルクTrを演算する抵抗トルク演算手段2cと、車両10の走行時のロール角θyを演算するロール角演算手段2fとを備える。さらに、駆動トルクTd,抵抗トルクTr及びロール角θyに基づき、車両10が静走行状態であるか又は動走行状態であるかを判別する判別手段3を備える。
また、判別手段3で車両10が前記静走行状態であると判別されたときに調整手段6による光軸角度の調整を許可し、動走行状態であると判別されたときに調整を禁止する制御手段4を備える。
(もっと読む)
車載ヘッドランプの光軸制御装置
【課題】車載ヘッドランプの光軸制御装置に関し、光軸補正を行うのに適した走行状態を高い精度で判別する。
【解決手段】車載ヘッドランプ5の光軸角度を上下方向に調整する調整手段6と、車両10の駆動輪に作用する駆動トルクTdを演算する駆動トルク演算手段2aとを備える。また、駆動トルクTdに基づき、車両10が静走行状態であるか又は動走行状態であるかを判別する判別手段3を備える。さらに、判別手段3で車両10が静走行状態であると判別されたときに調整手段6による光軸角度の調整を許可し、動走行状態であると判別されたときに調整を禁止する制御手段4を備える。
(もっと読む)
車両のランプ制御装置
【課題】車両の左右に設けたサブランプを制御することにより安全を確保する一方で、当該サブランプの点灯による無用な混乱を防止する。
【解決手段】左右のサブランプLCL,RCLをランプ制御するランプ制御ユニットECUを備え、ターン信号(SWT)又は操舵角信号(Sθ)からなるメイン情報信号に基づいてサブランプLCL,RCLを第1の点灯状態で点灯し、メイン情報信号以外のサブ情報信号(CAM1,CAM2,NAV,SV)に基づいてサブランプLCL,RCLを第1の点灯状態よりも目立ち易さが低い(顕著性が低い)第2の点灯状態で点灯する。例えば、進行方向側のサブランプを第1の照射光量で点灯して進行方向の安全を確保し、両側又は進行方向と反対側のサブランプを第1の照射光量よりも低い第2の照射光量で点灯することで運転者に対する違和感を防止し、かつ他車や歩行者が勘違いすることを防止する。
(もっと読む)
車両のランプ制御装置
【課題】対をなすランプにおけるランプ制御のタイミングを同期させることを可能にした車両のランプ制御装置を提供する。
【解決手段】対をなすランプLHL,RHLの一方に設けられたマスターECU1と、他方に設けられたスレーブECU2を備え、マスターECU1はランプ制御信号に基づいて一方のランプLHLをランプ制御する手段12と、当該ランプ制御信号をスレーブECU2に送信して他方のランプRHLをランプ制御するように構成し、マスターECUはタイミング制御手段として、送信したランプ制御信号を受信して一方のランプLHLをランプ制御するための手段14を備え、両方のランプLHL,RHLのランプ制御のタイミングを同期させる。
(もっと読む)
車両用灯具の制御装置および車両用灯具システム
【課題】加速度センサを用いて車両用灯具の光軸調節を実施するオートレベリング制御の精度を高める技術を提供する。
【解決手段】レベリングECU100は、加速度センサ110で検出される、水平面に対する車両の傾斜角度を導出可能な加速度を受信するための受信部102と、加速度センサ110が車両300に搭載された状態におけるセンサ側の軸と車両側の軸との理想的な位置関係を示す理想軸位置情報を保持するメモリ108と、車両300が所定の基準姿勢にあるとき加速度センサ110で検出される基準加速度を用いてセンサ側の軸と車両側の軸との理想的な位置関係からのずれを算定し、理想軸位置情報を補正する補正部1041と、補正された理想軸位置情報を用いて現在の加速度から車両300の傾斜角度を導出し、光軸調節を実施する調節指示部1042とを有する。
(もっと読む)
リンプホーム報知車両
【課題】リンプホームモードを周囲に報知するリンプホーム報知車両を提供する。
【解決手段】車両各部の故障診断結果に応じて故障時にエンジンを停止又は抑制制御するリンプホーム制御部2と、リンプホーム制御部2がエンジンを停止又は抑制制御するときに、ハザードランプ3を点滅させるハザードランプ制御部4とを備える。
(もっと読む)
ヘッドライトによる照射角度変更制御装置を備えた自動車。
【課題】従来の車は、ヘッドライトを照射し、直進、カ−ブでも曲進方向に対しライトは直進方向のライト照射システムである。ハンドル角度センサ−を備え、進行方向を的確に照射する、ヘッドライトのライト座を備えた、自動車照射角度変更制御装置を提供する。
【解決手段】現在のヘッドライトは1体であるが、ライト反射板、ライト座の2つから成る、ヘッドライトを有し、ライト座駆動モ−タ−にてライト座を曲進方向のみの、照射角度変更装置であり、ハンドルを右、又は左に第1所定角度範囲以上回動すると、ハンドル角度センサ−が働き、カーブ、交差点等曲進方向のライト座制御装置に信号を送る、ライト座制御装置は受信信号を演算、加工してライト座駆動モ−タ−に信号を送りライト座を、曲進方向に第2所定角度範囲内での、照射角度変更制御装置とを具える。
(もっと読む)
認識対象検出装置
【課題】処理負荷を抑えつつ、認識対象の検出精度を向上させる。
【解決手段】ハイダイナミックレンジ特性を有するイメージャを備える車載カメラによって撮像された、車両前方の画像を表す画像データを取得し(S11)、取得した撮像画像から処理対象画像を抽出する(S12)。そして、処理対象画像に対し、4種類のしきい値を用いて二値化処理を行い(S13A,S13B,S13C,S13D)、各二値化処理で生成した4種類の二値画像のそれぞれに基づいて認識対象を検出する認識処理を行う(S14A,S14B,S14C,S14D)。認識処理の結果、いずれかの二値画像から認識対象が検出されたと判定した場合には、ヘッドライトの点灯状態をロービームにし(S15:YES,S16)、いずれの二値画像からも認識対象が検出されなかったと判定した場合にはハイビームにする(S15:NO,S17)。
(もっと読む)
画像処理装置および配光制御方法
【課題】明るさが変化する車両の走行環境において、歩行者等に対するドライバの視認性を向上させる。
【解決手段】画像処理ECU32は、取得した車両前方の撮像画像を、車両から前方のそれぞれの領域までの距離に応じて区画された複数のブロックに分割する画像分割部70と、複数のブロックの画像情報に基づいて、該ブロックに対応する領域のそれぞれについて雰囲気の明るさを推定する明るさ推定部72と、車両からの距離が異なる複数の領域の推定された雰囲気の明るさに基づいて、前照灯ユニットの光により照射が可能な照射領域における雰囲気の明るさの変化を予見する明るさ予見部74と、を備える。
(もっと読む)
車両用灯具の制御装置および車両用灯具システム
【課題】加速度センサを用いて車両用灯具の光軸調節を実施するオートレベリング制御の精度を高める技術を提供する。
【解決手段】レベリングECU100は、加速度センサ110で検出される、路面角度θrと車両姿勢角度θvとを含む合計角度θを導出可能な加速度を受信するための受信部102と、車両用灯具の光軸調節を制御するための制御部104とを備える。制御部104は、合計角度θから、第1計算方法に基づいた第1暫定車両姿勢角度θv1と第2計算方法に基づいた第2暫定車両姿勢角度θv2とを導出し、第1暫定車両姿勢角度θv1および第2暫定車両姿勢角度θv2の一方を他方との差が小さくなるよう補正して、補正された暫定車両姿勢角度を車両姿勢角度θvとし、当該車両姿勢角度θvに応じて車両用灯具の光軸調節を指示する制御信号を出力する。
(もっと読む)
車輌用前照灯
【課題】 小型化を図る。
【解決手段】 開口を有するランプハウジング2とランプハウジングの開口を閉塞するカバー3とによって形成された灯室5に配置されると共にエイミング支点部と二つのエイミング作用部を有しエイミング作用部に対する作用によってエイミング支点部を支点としてランプハウジングに対して水平面内又は垂直面内において傾動されるフレーム21と、駆動制御部40と駆動制御部から突出され駆動制御部の駆動力によって軸方向へ移動される駆動軸41とを有すると共に駆動制御部がフレームに取り付けられて灯室に配置されたレベリングアクチュエーター39と、光源12と軸連結部16と支点用連結部18、18を有しフレームに垂直面内において支点用連結部を支点として傾動可能に支持されると共に軸連結部がレベリングアクチュエーターの駆動軸に連結された灯具ユニット7とを設け、軸連結部と支点用連結部を一体に形成した。
(もっと読む)
車両用投影装置
【課題】運転者の視線移動を抑制した上で、経路案内画像の視認性を向上させることができる車両用投影装置を提供する。
【解決手段】自車両10の現在位置、及び現在位置から設定された目的地までの経路を探索するナビゲーションシステムと、自車両10が経路上の分岐点に乗員が視認可能な程度まで近づいたとき、ナビゲーションシステムで探索された経路情報に基づいて、自車両10を分岐方向へと誘導する経路案内画像Aを自車両10の前方の路面L上に投影する投影手段15と、を備えていることを特徴とする。
(もっと読む)
車両用灯具の制御装置および車両用灯具システム
【課題】加速度センサを用いて車両用灯具の光軸調節を実施するオートレベリング制御の精度を高める技術を提供する。
【解決手段】レベリングECU100は、加速度センサ110で検出される、路面角度θrと車両姿勢角度θvとを含む合計角度θを導出可能な加速度を受信するための受信部102と、車両用灯具の光軸調節を制御するための制御部104とを備える。制御部104は、路面角度θの基準値と車両姿勢角度θvの基準値とを保持し、車両停止中の合計角度θの変化を車両姿勢角度θvの変化として車両姿勢角度θvの基準値を更新するとともに光軸調節を実施し、車両走行中の合計角度θの変化を路面角度θrの変化として路面角度θrの基準値を更新し、路面角度θrの基準値および車両姿勢角度θvの基準値の合計値と、合計角度θとの差を導出して、これら2つの基準値の少なくとも一方を補正する。
(もっと読む)
41 - 60 / 335
[ Back to top ]