
車両用投影装置
【課題】運転者の視線移動を抑制した上で、経路案内画像の視認性を向上させることができる車両用投影装置を提供する。
【解決手段】自車両10の現在位置、及び現在位置から設定された目的地までの経路を探索するナビゲーションシステムと、自車両10が経路上の分岐点に乗員が視認可能な程度まで近づいたとき、ナビゲーションシステムで探索された経路情報に基づいて、自車両10を分岐方向へと誘導する経路案内画像Aを自車両10の前方の路面L上に投影する投影手段15と、を備えていることを特徴とする。
【解決手段】自車両10の現在位置、及び現在位置から設定された目的地までの経路を探索するナビゲーションシステムと、自車両10が経路上の分岐点に乗員が視認可能な程度まで近づいたとき、ナビゲーションシステムで探索された経路情報に基づいて、自車両10を分岐方向へと誘導する経路案内画像Aを自車両10の前方の路面L上に投影する投影手段15と、を備えていることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用投影装置に関するものである。
【背景技術】
【0002】
走行支援の技術として、車両にプロジェクタを搭載した車両用投影装置が知られている(例えば、特許文献1参照)。
特許文献1の車両用投影装置では、移動体(例えば、歩行者)が判別領域に存在する場合に、注意喚起用の画像を路面上に直接投影することで、歩行者に対して注意を喚起させ、歩行者の安全を確保できるようになっている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−7079号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した従来の車両用投影装置にあっては、歩行者等、周囲の移動体を対象にした画像を投影するものであり、自車両の運転者等、乗員を対象とするものではなかった。
【0005】
ここで、走行支援の技術の一つであるナビゲーションシステムにあっては、運転者はモニタに表示された経路案内画像を目視で確認しながら運転する必要がある。この場合、特に複雑な分岐路等では、実際の走行路と、モニタに表示された経路案内画像と、を繰り返し見返す等の照合作業を要することもある。
【0006】
そこで、本発明は、運転者の視線移動を抑制した上で、経路案内画像の視認性を向上させることができる車両用投影装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、請求項1に記載した発明は、自車両(例えば、実施形態における自車両10)の現在位置、及び前記現在位置から設定された目的地までの経路を探索する経路探索手段(例えば、実施形態におけるナビゲーションシステム13)と、前記自車両が前記経路上の分岐点に乗員が視認可能な程度まで近づいたとき、前記経路探索手段で探索された経路情報に基づいて、前記自車両を分岐方向へと誘導する経路案内画像(例えば、実施形態における経路案内画像A)を前記自車両の前方の路面上に投影する投影手段(例えば、実施形態における投影手段15)と、を備えていることを特徴とする。
【0008】
請求項2に記載した発明では、前記経路案内画像は、前記自車両の直進方向に沿って延びる直進指示部(例えば、実施形態における直進指示部A1)と、前記直進指示部に対して曲折して分岐方向に沿って延びる分岐指示部(例えば、実施形態における分岐指示部A2)と、を有する矢印画像であり、前記投影手段は、前記直進指示部の先端を前記分岐点に合わせて投影することを特徴とする。
【0009】
請求項3に記載した発明では、前記投影手段は、前記現在位置から前記分岐点までの到達残距離が短くなるに従い、前記直進指示部の長さが短くなるように投影することを特徴とする。
【0010】
請求項4に記載した発明では、前記投影手段は、前記現在位置から前記分岐点までの到達残距離が短くなるに従い、前記分岐指示部の長さが長くなるように投影することを特徴とする。
【0011】
請求項5に記載した発明では、前記投影手段は、前記現在位置から前記分岐点までの到達残距離が短くなるに従い、前記分岐指示部の幅が広くなるように投影することを特徴とする。
【0012】
請求項6に記載した発明では、前記投影手段は、前記自車両の走行速度が遅くなるに従い、前記直進指示部の幅が広くなるように投影することを特徴とする。
【0013】
請求項7に記載した発明では、前記投影手段は、前記路面に対する投影角度を変更可能に構成されていることを特徴とする。
【0014】
請求項8に記載した発明では、前記自車両の周辺を撮影する撮影手段を備え、前記撮影手段が撮影した撮影結果に基づいて前記投影手段の投影範囲を調整することを特徴とする。
【0015】
請求項9に記載した発明では、前記投影手段は、前記撮影手段の前記撮影結果により前記自車両の前方における投影範囲内に障害物または前方車両が検出された場合に、投影を禁止することを特徴とする。
【0016】
請求項10に記載した発明では、前記自車両の前照灯の点灯時における前記投影手段の投影開始時期を、前記前照灯の消灯時に比べて早く設定することを特徴とする。
【発明の効果】
【0017】
請求項1に記載した発明によれば、路面に投影された経路案内画像を確認しながら走行することで、ナビゲーションシステムのモニタを確認する等、視線を自車両の進行方向から外すことなく、また、目の焦点を大きく変化させる必要なく、目的地までの経路を確認できる。
さらに、経路案内画像が路面に直接投影されるので、運転者から見て経路案内画像と実際の路面とのズレが少なく、経路案内画像を正確、かつ速やかに認識できる。
したがって、運転者の視線移動を抑制した上で、経路案内画像の視認性を向上させることができる。
また、経路案内画像が路面に直接投影されるので、自車両の運転者だけでなく、自車両の周囲の移動体(例えば、自車両の前方に存在する歩行者等)も自車両の進行方向を認識できるので、周囲の移動体に対する注意喚起の機能も果たすことができる。
【0018】
請求項2に記載した発明によれば、直進指示部の先端を分岐点に合わせて投影することで、実際に分岐すべき分岐点を判断し易くなる。
【0019】
請求項3〜6に記載した発明によれば、分岐点までの到達残距離や、自車両の走行速度等、自車両の走行状態に応じて経路案内画像の長さや幅を変更することで、経路案内画像に遠近感(奥行き)を持たせることができる。したがって、経路案内画像の視認性をより一層向上できる。
【0020】
請求項7に記載した発明によれば、投影手段を下方に傾けるに従い経路案内画像の投影範囲が自車両に接近することになる。この場合、プロジェクタの出力が一定とすると、投影範囲が遠い場合に比べてプロジェクタの出力に対する輝度を向上させることができる。そのため、例えば、分岐点までの到達残距離が近くになるに従いプロジェクタの投影位置を近づけることで、分岐点に近づくにつれて経路案内画像の視認性を向上させることができる。
【0021】
請求項8に記載した発明によれば、撮影手段が撮影した撮影結果に基づいて投影範囲を調整することで、周辺状況に関わらず経路案内画像を最適な範囲に投影できる。
【0022】
請求項9に記載した発明によれば、投影手段の投影範囲に障害物や前方車両が存在した場合に、投影手段による投影を禁止することで、経路案内画像が前方車両の乗員等に影響を及ぼすことがない。
【0023】
請求項10に記載した発明によれば、前照灯の点灯時であっても、視認性を維持することができる。
【図面の簡単な説明】
【0024】
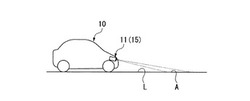
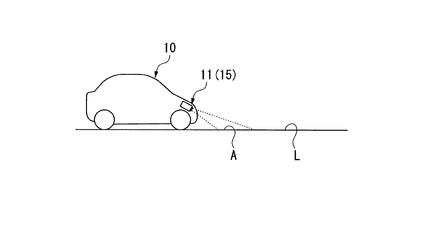
【図1】本発明の実施形態における自車両の側面図である。
【図2】投影手段のブロック図である。
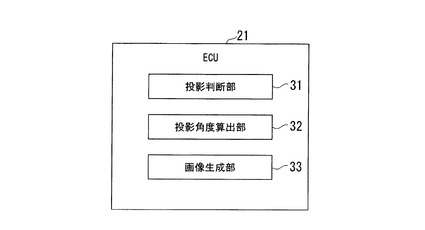
【図3】ECUのブロック図である。
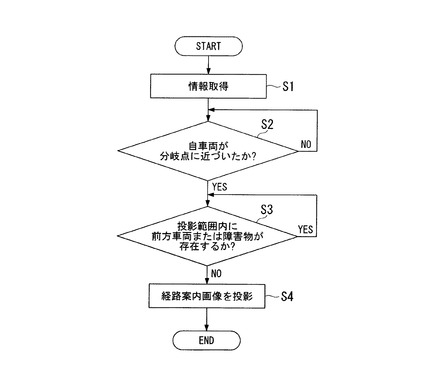
【図4】ECUによる画像投影処理を示すフローチャートである。
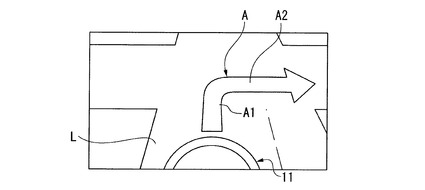
【図5】車室内から自車両の前方を見た図であって、経路案内画像を示す説明図である。
【図6】車室内から自車両の前方を見た図であって、経路案内画像を示す説明図である。
【図7】車室内から自車両の前方を見た図であって、経路案内画像を示す説明図である。
【図8】図1に相当する図であって、経路案内画像を示す説明図である。
【発明を実施するための形態】
【0025】
次に、本発明の実施形態を図面に基づいて説明する。図1は自車両10の側面図であり、図2は車両用投影装置11のブロック図である。以下の説明における前後左右等の向きは、特に記載が無ければ車両における向きと同一とする。
図1,2に示すように、本実施形態の車両用投影装置11は、車速センサ12と、ナビゲーションシステム(経路探索手段)13と、車外カメラ14と、これら車速センサ12、ナビゲーションシステム13、及び車外カメラ14による検出結果に基づいて自車両10を誘導する経路案内画像Aを自車両10の前方の路面L上に投影する投影手段15と、投影手段15に電力を供給するバッテリ16、及び車軸発電機17と、を有している。
【0026】
車速センサ12は、自車両10の走行速度を検出するためのものであって、走行速度の検出結果は投影手段15の後述するECU21に入力される。
ナビゲーションシステム13は、自車両10の現在位置、及び現在位置から目的地までの経路を探索して自車両10を誘導するためのものであって、図示しない現在位置検出部と、地図データ記憶部と、ナビゲーション処理部と、を主に備えている。
【0027】
現在位置検出部は、人工衛星を利用したGPS(Global Positioning System)信号等の測位信号を受信して、自車両10の現在位置を検出する。
地図データ記憶部は、ハードディスク装置等の磁気ディスク装置や、CD−ROMやDVD−ROM等の光ディスク装置等のコンピュータ読み取り可能な記憶媒体に、地図データを記録して構成されている。その地図データとして、例えば道路や交差点の位置、形状等の道路データが格納されている。
ナビゲーション処理部は、現在位置検出部で検出された現在位置、ナビゲーションシステム13に入力された目的地、及び地図データ記憶部から読み出された地図データに基づいて、自車両10の走行経路を探索する。
【0028】
車外カメラ14は、自車両10の周辺を撮影するものであって、撮影した撮影結果が投影手段15のECU21に向けて出力される。
【0029】
ここで、投影手段15は、路面L上に経路案内画像Aを投影するプロジェクタ22と、プロジェクタ22の路面Lに対する投影角度を変更するモータ23と、上述した車速センサ12、ナビゲーションシステム13、及び車外カメラ14による各検出結果に基づいてプロジェクタ22、及びモータ23を統括的に制御するECU21と、を備えている。また、投影手段15には、バッテリ16、及び車軸発電機17から電力が供給されるようになっている。
【0030】
図3は、ECU21のブロック図である。
図3に示すように、ECU21は、投影判断部31と、投影角度算出部32と、画像生成部33と、を主に備えている。
投影判断部31は、上述したナビゲーションシステム13から入力される情報(経路情報や現在位置から分岐点までの到達残距離等)に基づいて、プロジェクタ22による経路案内画像Aの投影を開始するか否かを判断する。具体的に、投影判断部31は、ナビゲーションシステム13により算出される分岐点までの到達残距離が所定距離以内になったとき(自車両10が分岐点に乗員が視認可能な程度まで近づいたとき)に、この判断結果を画像生成部33に向けて出力する。
さらに、投影判断部31は、車外カメラ14による撮影結果に基づいて自車両10の前方におけるプロジェクタ22の投影範囲内(自車両10とプロジェクタ22の投影位置との間の範囲)に前方車両や障害物等が存在しないと判断したときに、この判断結果を画像生成部33に向けて出力する。
【0031】
投影角度算出部32は、自車両10の現在位置から分岐点までの到達残距離や、走行速度、車外カメラ14による撮影結果等に基づいて、プロジェクタ22の路面Lに対する投影角度を算出し、この算出結果をモータ23に向けて出力することで、経路案内画像Aの投影位置を調整する。具体的に、投影角度算出部32は、到達残距離が短くなったり、走行速度が遅くなったりするのに従い、プロジェクタ22を下方に向けて傾け、経路案内画像Aの投影位置が自車両10に接近するように制御する。
【0032】
画像生成部33は、上述したナビゲーションシステム13から入力される情報に基づいて、プロジェクタ22で投影する経路案内画像Aの基本画像を図示しないメモリ部から選択し、プロジェクタ22に入力する。なお、本実施形態のプロジェクタ22で投影する経路案内画像Aは、例えば図5に示すように、自車両10の直進方向に沿って分岐点に向かって延びる直進指示部A1と、分岐点において直進指示部A1に対して曲折して分岐方向に沿って延びる分岐指示部A2と、を有する矢印画像である。そして、上述したメモリ部には、十字路、T字路等の交差点において、自車両10の右折(左折)または分岐等を誘導するための経路案内画像Aの各基本画像が記憶されている。
【0033】
また、画像生成部33は、自車両10の走行状態、具体的には現在位置から分岐点までの到達残距離や、自車両10の走行速度に基づいて、上述したメモリ部から選択された経路案内画像Aの基本画像の長さや、幅を調整する。具体的に、画像生成部33は、直進指示部A1の先端を分岐点に合わせた状態で、分岐点に近づくに従い直進指示部A1の長さを短くする一方、分岐指示部A2の長さを長く、かつ太くするように制御する。また、画像生成部33は、自車両10の走行速度が遅くなるに従い、直進指示部A1の幅を広くするように制御している。
【0034】
プロジェクタ22は、上述したECU21の画像生成部33で生成された経路案内画像Aを路面Lに向けて投影するものであって、自車両10の前側における車幅方向の中央部に搭載されている。
モータ23は、プロジェクタ22に接続され、上述した投影角度算出部32の算出結果に基づいて、プロジェクタ22を路面Lに対して所望の投影角度となるように傾動させる。
【0035】
(作用)
次に、図4のフローチャートに基づいてECU21による画像投影処理を説明する。なお、以下の説明では、自車両10が分岐点(交差点)を右折する場合について説明する。
まず、ステップS1において、ECU21は、ナビゲーションシステム13、車速センサ12、及び車外カメラ14から各種情報を取得する。
【0036】
次に、ステップS2において、投影判断部31は、ナビゲーションシステム13により算出された分岐点までの到達残距離が所定距離以内か否かを判断する。
ステップS2の判断結果が「NO」の場合(所定距離より長い場合)は、自車両10は分岐点に近づいてないと判断して、ステップS2の判断を繰り返す。
一方、ステップS2の判断結果が「YES」の場合(所定距離以内の場合)は、自車両10が分岐点に乗員が視認可能な程度まで近づいたと判断して、ステップS3に進む。
【0037】
さらに、投影判断部31は、ステップS3において、車外カメラ14による撮影結果に基づいて、プロジェクタ22の投影範囲内に前方車両や障害物が存在するか否かを判断する。
ステップS3の判断結果が「YES」の場合は、プロジェクタ22の投影範囲内に前方車両や障害物が存在すると判断して、プロジェクタ22による投影を禁止する。この場合は、上述したステップS3のフローを繰り返す。
一方、ステップS3の判断結果が「NO」の場合は、プロジェクタ22の投影範囲内に前方車両や障害物が存在しないと判断して、ステップS4に進む。
【0038】
次に、ステップS4において、プロジェクタ22から経路案内画像Aを投影する。具体的に、ナビゲーションシステム13から入力される情報、車速センサ12から入力される走行速度、及び車外カメラ14による撮影結果等、自車両10の走行状態に基づいて、画像生成部33により経路案内画像Aを生成するとともに、投影角度算出部32によりプロジェクタ22の投影角度を算出する。そして、投影角度算出部32の算出結果に基づいて、モータ23がプロジェクタ22を所望の投影角度に傾動させた状態で、画像生成部33で生成された経路案内画像Aがプロジェクタ22から路面Lに向けて投影される。
【0039】
図5〜7は、車室内から自車両の前方を見た図であって、経路案内画像Aを示す説明図である。
ここで、図1,5に示すように、プロジェクタ22からは、直進指示部A1、及び分岐指示部A2を有する矢印画像が投影される。この場合、画像生成部33は、まずナビゲーションシステム13から入力される情報に基づいて、プロジェクタ22で投影する経路案内画像Aの基本画像を図示しないメモリ部から選択する。その後、上述した自車両10の走行状態に基づいて、経路案内画像Aの長さや幅を変形する。
具体的に、図6,7に示すように、画像生成部33は、直進指示部A1の先端を分岐点に合わせた状態で、自車両10が分岐点に近づくに従い、直進指示部A1の長さを短くする一方、分岐指示部A2の長さを長く、かつ太くする。また、画像生成部33は、自車両10の走行速度が遅くなるに従い、直進指示部A1の幅を広くするように制御している。すなわち、直進指示部A1の幅は、分岐点に向けて減速するに従い広くなるようになっている。なお、画像生成部31は、自車両10が分岐点で分岐が完了するまで、自車両10の走行状態に基づいて経路案内画像Aを生成し続ける。
【0040】
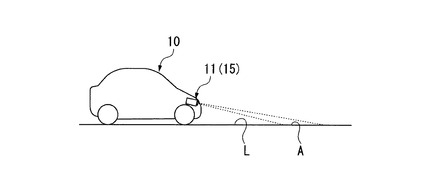
図8は、図1に相当する図であって、経路案内画像を示す説明図である。
さらに、ステップS4において、投影角度算出部32は、自車両10の走行状態に基づいてプロジェクタ22の路面Lに対する投影角度を算出し続け、プロジェクタ22の投影位置を調整する。具体的に、投影角度算出部32は、図8に示すように、分岐点までの到達残距離が近く、または走行速度が遅くなるに従い、プロジェクタ22を下方に傾け、投影位置を自車両10に接近させる。
【0041】
以上により、ECU21による画像投影処理を終了する。なお、ナビゲーションシステム13に目的地を設定して走行している最中には、上述したフローを繰り返して行う。
【0042】
このように、本実施形態では、自車両10が分岐点に乗員が視認可能な程度まで近づいたとき、ナビゲーションシステム13で探索された経路情報に基づいて、自車両10を分岐方向へと誘導する経路案内画像Aを自車両10の前方の路面L上に投影する投影手段15を有する構成とした。
この構成によれば、路面Lに投影された経路案内画像Aを確認しながら走行することで、ナビゲーションシステム13のモニタを確認する等、視線を自車両10の進行方向から外すことなく、また、目の焦点を大きく変化させる必要なく、目的地までの経路を確認できる。
さらに、経路案内画像Aが路面Lに直接投影されるので、運転者から見て経路案内画像Aと実際の路面Lとのズレが少なく、経路案内画像Aを正確、かつ速やかに認識できる。
したがって、運転者の視線移動を抑制した上で、経路案内画像Aの視認性を向上させることができる。
また、経路案内画像Aが路面Lに直接投影されるので、自車両10の運転者だけでなく、自車両10の周囲の移動体(例えば、自車両10の前方に存在する歩行者等)も自車両10の進行方向を確認できることになる。そのため、周囲の移動体に対する注意喚起の機能も果たすことができる。
【0043】
また、直進指示部A1の先端を分岐点に合わせて投影することで、実際に分岐すべき分岐点を判断し易くなる。
さらに、自車両10の走行状態に応じて経路案内画像Aの長さや幅を変更することで、経路案内画像Aに遠近感(奥行き)を持たせることができる。したがって、経路案内画像Aの視認性をより一層向上できる。
【0044】
また、分岐点までの到達残距離が近くになるに従いプロジェクタ22の投影位置を近づけることで、プロジェクタ22の投影位置が遠い場合に比べてプロジェクタ22の出力に対する輝度を向上させ、視認性をより一層向上させることができる。
さらに、車外カメラ14が撮影した画像結果に基づいて投影位置を調整することで、周辺状況に関わらず経路案内画像Aを最適な位置に投影できる。また、自車両10とプロジェクタ22の投影位置との間に前方車両や障害物等が存在した場合には、プロジェクタ22による投影を禁止とすることで、経路案内画像Aが前方車両の乗員等に影響を及ぼすことがない。
【0045】
なお、本実施形態の車軸発電機17は、車軸の回転力に応じた電力を投影手段15(プロジェクタ22)へ供給可能となっており、走行速度の増加に伴い高電力を供給できるので、その電力を用いて走行速度の増加に伴い投影手段15(プロジェクタ22)の経路案内画像Aの輝度を高めてもよい。そうすることで、プロジェクタ22への輝度を高めるための電力を、バッテリ16を用いずに賄うことができる。
また、通常は投影方向を下方に向けた状態で配置されているプロジェクタ22において、車軸発電機17で発電された電力を用いてプロジェクタ22の路面Lに対する投影角度を上方に傾けるように制御してもよい。そうすることで、プロジェクタ22を上方へ向ける電力をバッテリ16を用いず賄うこともできる。
【0046】
なお、本発明の技術範囲は、上述した各実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲において、上述した実施形態に種々の変更を加えたものを含む。すなわち、上述した実施形態で挙げた構成等はほんの一例に過ぎず、適宜変更が可能である。
例えば、プロジェクタにより投影される経路案内画像Aは、単色に限らず、複数色の色で投影できるようにしても構わない。この場合、自車両10の周辺状況を検出する外界センサ等を設け、路面Lの状態や、時刻、天候等で変動する路面色や路面照度に応じて最も認識し易い色で経路案内画像を投影しても構わない。
【0047】
さらに、上述した実施形態では、ナビゲーションシステム13の経路情報に基づいて経路案内画像Aを投影する場合について説明したが、速度等を投影しても構わない。
また、上述した実施形態では、プロジェクタ22を車幅方向の中央部に搭載する構成について説明したが、これに限らず、車幅方向の運転席側に搭載しても構わない。
また、経路案内画像Aの投影が開始される所定距離は、予め設定されていても、乗員自身で自由に設定できるようにしても構わない。この場合、夜間等の前照灯の点灯時は、前照灯の消灯時に比べて投影開始のタイミングを早め(遠め)に設定しておくことが好ましい。これにより、前照灯の点灯時であっても、視認性を維持することができる。
【0048】
また、上述した実施形態では、交差点(分岐点)を右折する場合について説明したが、これに限らず、例えばT字路や五叉路等、各種の分岐点での経路案内に用いることができる。
【0049】
また、上述した実施形態では、経路案内画像Aに矢印画像を用いる場合について説明したが、運転者が分岐方向を認識できる画像であれば、矢印画像に限らない。
また、上述した実施形態では、プロジェクタ22の投影角度を変更することで、自車両10に対する投影位置を変更する場合について説明したが、これに限らず、プロジェクタ22の投影範囲内で経路案内画像Aを移動させても構わない。
【符号の説明】
【0050】
10…自車両 13…ナビゲーションシステム(経路探索手段) 15…投影手段 A…経路案内画像 A1…直進指示部 A2…分岐指示部
【技術分野】
【0001】
本発明は、車両用投影装置に関するものである。
【背景技術】
【0002】
走行支援の技術として、車両にプロジェクタを搭載した車両用投影装置が知られている(例えば、特許文献1参照)。
特許文献1の車両用投影装置では、移動体(例えば、歩行者)が判別領域に存在する場合に、注意喚起用の画像を路面上に直接投影することで、歩行者に対して注意を喚起させ、歩行者の安全を確保できるようになっている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−7079号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した従来の車両用投影装置にあっては、歩行者等、周囲の移動体を対象にした画像を投影するものであり、自車両の運転者等、乗員を対象とするものではなかった。
【0005】
ここで、走行支援の技術の一つであるナビゲーションシステムにあっては、運転者はモニタに表示された経路案内画像を目視で確認しながら運転する必要がある。この場合、特に複雑な分岐路等では、実際の走行路と、モニタに表示された経路案内画像と、を繰り返し見返す等の照合作業を要することもある。
【0006】
そこで、本発明は、運転者の視線移動を抑制した上で、経路案内画像の視認性を向上させることができる車両用投影装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、請求項1に記載した発明は、自車両(例えば、実施形態における自車両10)の現在位置、及び前記現在位置から設定された目的地までの経路を探索する経路探索手段(例えば、実施形態におけるナビゲーションシステム13)と、前記自車両が前記経路上の分岐点に乗員が視認可能な程度まで近づいたとき、前記経路探索手段で探索された経路情報に基づいて、前記自車両を分岐方向へと誘導する経路案内画像(例えば、実施形態における経路案内画像A)を前記自車両の前方の路面上に投影する投影手段(例えば、実施形態における投影手段15)と、を備えていることを特徴とする。
【0008】
請求項2に記載した発明では、前記経路案内画像は、前記自車両の直進方向に沿って延びる直進指示部(例えば、実施形態における直進指示部A1)と、前記直進指示部に対して曲折して分岐方向に沿って延びる分岐指示部(例えば、実施形態における分岐指示部A2)と、を有する矢印画像であり、前記投影手段は、前記直進指示部の先端を前記分岐点に合わせて投影することを特徴とする。
【0009】
請求項3に記載した発明では、前記投影手段は、前記現在位置から前記分岐点までの到達残距離が短くなるに従い、前記直進指示部の長さが短くなるように投影することを特徴とする。
【0010】
請求項4に記載した発明では、前記投影手段は、前記現在位置から前記分岐点までの到達残距離が短くなるに従い、前記分岐指示部の長さが長くなるように投影することを特徴とする。
【0011】
請求項5に記載した発明では、前記投影手段は、前記現在位置から前記分岐点までの到達残距離が短くなるに従い、前記分岐指示部の幅が広くなるように投影することを特徴とする。
【0012】
請求項6に記載した発明では、前記投影手段は、前記自車両の走行速度が遅くなるに従い、前記直進指示部の幅が広くなるように投影することを特徴とする。
【0013】
請求項7に記載した発明では、前記投影手段は、前記路面に対する投影角度を変更可能に構成されていることを特徴とする。
【0014】
請求項8に記載した発明では、前記自車両の周辺を撮影する撮影手段を備え、前記撮影手段が撮影した撮影結果に基づいて前記投影手段の投影範囲を調整することを特徴とする。
【0015】
請求項9に記載した発明では、前記投影手段は、前記撮影手段の前記撮影結果により前記自車両の前方における投影範囲内に障害物または前方車両が検出された場合に、投影を禁止することを特徴とする。
【0016】
請求項10に記載した発明では、前記自車両の前照灯の点灯時における前記投影手段の投影開始時期を、前記前照灯の消灯時に比べて早く設定することを特徴とする。
【発明の効果】
【0017】
請求項1に記載した発明によれば、路面に投影された経路案内画像を確認しながら走行することで、ナビゲーションシステムのモニタを確認する等、視線を自車両の進行方向から外すことなく、また、目の焦点を大きく変化させる必要なく、目的地までの経路を確認できる。
さらに、経路案内画像が路面に直接投影されるので、運転者から見て経路案内画像と実際の路面とのズレが少なく、経路案内画像を正確、かつ速やかに認識できる。
したがって、運転者の視線移動を抑制した上で、経路案内画像の視認性を向上させることができる。
また、経路案内画像が路面に直接投影されるので、自車両の運転者だけでなく、自車両の周囲の移動体(例えば、自車両の前方に存在する歩行者等)も自車両の進行方向を認識できるので、周囲の移動体に対する注意喚起の機能も果たすことができる。
【0018】
請求項2に記載した発明によれば、直進指示部の先端を分岐点に合わせて投影することで、実際に分岐すべき分岐点を判断し易くなる。
【0019】
請求項3〜6に記載した発明によれば、分岐点までの到達残距離や、自車両の走行速度等、自車両の走行状態に応じて経路案内画像の長さや幅を変更することで、経路案内画像に遠近感(奥行き)を持たせることができる。したがって、経路案内画像の視認性をより一層向上できる。
【0020】
請求項7に記載した発明によれば、投影手段を下方に傾けるに従い経路案内画像の投影範囲が自車両に接近することになる。この場合、プロジェクタの出力が一定とすると、投影範囲が遠い場合に比べてプロジェクタの出力に対する輝度を向上させることができる。そのため、例えば、分岐点までの到達残距離が近くになるに従いプロジェクタの投影位置を近づけることで、分岐点に近づくにつれて経路案内画像の視認性を向上させることができる。
【0021】
請求項8に記載した発明によれば、撮影手段が撮影した撮影結果に基づいて投影範囲を調整することで、周辺状況に関わらず経路案内画像を最適な範囲に投影できる。
【0022】
請求項9に記載した発明によれば、投影手段の投影範囲に障害物や前方車両が存在した場合に、投影手段による投影を禁止することで、経路案内画像が前方車両の乗員等に影響を及ぼすことがない。
【0023】
請求項10に記載した発明によれば、前照灯の点灯時であっても、視認性を維持することができる。
【図面の簡単な説明】
【0024】
【図1】本発明の実施形態における自車両の側面図である。
【図2】投影手段のブロック図である。
【図3】ECUのブロック図である。
【図4】ECUによる画像投影処理を示すフローチャートである。
【図5】車室内から自車両の前方を見た図であって、経路案内画像を示す説明図である。
【図6】車室内から自車両の前方を見た図であって、経路案内画像を示す説明図である。
【図7】車室内から自車両の前方を見た図であって、経路案内画像を示す説明図である。
【図8】図1に相当する図であって、経路案内画像を示す説明図である。
【発明を実施するための形態】
【0025】
次に、本発明の実施形態を図面に基づいて説明する。図1は自車両10の側面図であり、図2は車両用投影装置11のブロック図である。以下の説明における前後左右等の向きは、特に記載が無ければ車両における向きと同一とする。
図1,2に示すように、本実施形態の車両用投影装置11は、車速センサ12と、ナビゲーションシステム(経路探索手段)13と、車外カメラ14と、これら車速センサ12、ナビゲーションシステム13、及び車外カメラ14による検出結果に基づいて自車両10を誘導する経路案内画像Aを自車両10の前方の路面L上に投影する投影手段15と、投影手段15に電力を供給するバッテリ16、及び車軸発電機17と、を有している。
【0026】
車速センサ12は、自車両10の走行速度を検出するためのものであって、走行速度の検出結果は投影手段15の後述するECU21に入力される。
ナビゲーションシステム13は、自車両10の現在位置、及び現在位置から目的地までの経路を探索して自車両10を誘導するためのものであって、図示しない現在位置検出部と、地図データ記憶部と、ナビゲーション処理部と、を主に備えている。
【0027】
現在位置検出部は、人工衛星を利用したGPS(Global Positioning System)信号等の測位信号を受信して、自車両10の現在位置を検出する。
地図データ記憶部は、ハードディスク装置等の磁気ディスク装置や、CD−ROMやDVD−ROM等の光ディスク装置等のコンピュータ読み取り可能な記憶媒体に、地図データを記録して構成されている。その地図データとして、例えば道路や交差点の位置、形状等の道路データが格納されている。
ナビゲーション処理部は、現在位置検出部で検出された現在位置、ナビゲーションシステム13に入力された目的地、及び地図データ記憶部から読み出された地図データに基づいて、自車両10の走行経路を探索する。
【0028】
車外カメラ14は、自車両10の周辺を撮影するものであって、撮影した撮影結果が投影手段15のECU21に向けて出力される。
【0029】
ここで、投影手段15は、路面L上に経路案内画像Aを投影するプロジェクタ22と、プロジェクタ22の路面Lに対する投影角度を変更するモータ23と、上述した車速センサ12、ナビゲーションシステム13、及び車外カメラ14による各検出結果に基づいてプロジェクタ22、及びモータ23を統括的に制御するECU21と、を備えている。また、投影手段15には、バッテリ16、及び車軸発電機17から電力が供給されるようになっている。
【0030】
図3は、ECU21のブロック図である。
図3に示すように、ECU21は、投影判断部31と、投影角度算出部32と、画像生成部33と、を主に備えている。
投影判断部31は、上述したナビゲーションシステム13から入力される情報(経路情報や現在位置から分岐点までの到達残距離等)に基づいて、プロジェクタ22による経路案内画像Aの投影を開始するか否かを判断する。具体的に、投影判断部31は、ナビゲーションシステム13により算出される分岐点までの到達残距離が所定距離以内になったとき(自車両10が分岐点に乗員が視認可能な程度まで近づいたとき)に、この判断結果を画像生成部33に向けて出力する。
さらに、投影判断部31は、車外カメラ14による撮影結果に基づいて自車両10の前方におけるプロジェクタ22の投影範囲内(自車両10とプロジェクタ22の投影位置との間の範囲)に前方車両や障害物等が存在しないと判断したときに、この判断結果を画像生成部33に向けて出力する。
【0031】
投影角度算出部32は、自車両10の現在位置から分岐点までの到達残距離や、走行速度、車外カメラ14による撮影結果等に基づいて、プロジェクタ22の路面Lに対する投影角度を算出し、この算出結果をモータ23に向けて出力することで、経路案内画像Aの投影位置を調整する。具体的に、投影角度算出部32は、到達残距離が短くなったり、走行速度が遅くなったりするのに従い、プロジェクタ22を下方に向けて傾け、経路案内画像Aの投影位置が自車両10に接近するように制御する。
【0032】
画像生成部33は、上述したナビゲーションシステム13から入力される情報に基づいて、プロジェクタ22で投影する経路案内画像Aの基本画像を図示しないメモリ部から選択し、プロジェクタ22に入力する。なお、本実施形態のプロジェクタ22で投影する経路案内画像Aは、例えば図5に示すように、自車両10の直進方向に沿って分岐点に向かって延びる直進指示部A1と、分岐点において直進指示部A1に対して曲折して分岐方向に沿って延びる分岐指示部A2と、を有する矢印画像である。そして、上述したメモリ部には、十字路、T字路等の交差点において、自車両10の右折(左折)または分岐等を誘導するための経路案内画像Aの各基本画像が記憶されている。
【0033】
また、画像生成部33は、自車両10の走行状態、具体的には現在位置から分岐点までの到達残距離や、自車両10の走行速度に基づいて、上述したメモリ部から選択された経路案内画像Aの基本画像の長さや、幅を調整する。具体的に、画像生成部33は、直進指示部A1の先端を分岐点に合わせた状態で、分岐点に近づくに従い直進指示部A1の長さを短くする一方、分岐指示部A2の長さを長く、かつ太くするように制御する。また、画像生成部33は、自車両10の走行速度が遅くなるに従い、直進指示部A1の幅を広くするように制御している。
【0034】
プロジェクタ22は、上述したECU21の画像生成部33で生成された経路案内画像Aを路面Lに向けて投影するものであって、自車両10の前側における車幅方向の中央部に搭載されている。
モータ23は、プロジェクタ22に接続され、上述した投影角度算出部32の算出結果に基づいて、プロジェクタ22を路面Lに対して所望の投影角度となるように傾動させる。
【0035】
(作用)
次に、図4のフローチャートに基づいてECU21による画像投影処理を説明する。なお、以下の説明では、自車両10が分岐点(交差点)を右折する場合について説明する。
まず、ステップS1において、ECU21は、ナビゲーションシステム13、車速センサ12、及び車外カメラ14から各種情報を取得する。
【0036】
次に、ステップS2において、投影判断部31は、ナビゲーションシステム13により算出された分岐点までの到達残距離が所定距離以内か否かを判断する。
ステップS2の判断結果が「NO」の場合(所定距離より長い場合)は、自車両10は分岐点に近づいてないと判断して、ステップS2の判断を繰り返す。
一方、ステップS2の判断結果が「YES」の場合(所定距離以内の場合)は、自車両10が分岐点に乗員が視認可能な程度まで近づいたと判断して、ステップS3に進む。
【0037】
さらに、投影判断部31は、ステップS3において、車外カメラ14による撮影結果に基づいて、プロジェクタ22の投影範囲内に前方車両や障害物が存在するか否かを判断する。
ステップS3の判断結果が「YES」の場合は、プロジェクタ22の投影範囲内に前方車両や障害物が存在すると判断して、プロジェクタ22による投影を禁止する。この場合は、上述したステップS3のフローを繰り返す。
一方、ステップS3の判断結果が「NO」の場合は、プロジェクタ22の投影範囲内に前方車両や障害物が存在しないと判断して、ステップS4に進む。
【0038】
次に、ステップS4において、プロジェクタ22から経路案内画像Aを投影する。具体的に、ナビゲーションシステム13から入力される情報、車速センサ12から入力される走行速度、及び車外カメラ14による撮影結果等、自車両10の走行状態に基づいて、画像生成部33により経路案内画像Aを生成するとともに、投影角度算出部32によりプロジェクタ22の投影角度を算出する。そして、投影角度算出部32の算出結果に基づいて、モータ23がプロジェクタ22を所望の投影角度に傾動させた状態で、画像生成部33で生成された経路案内画像Aがプロジェクタ22から路面Lに向けて投影される。
【0039】
図5〜7は、車室内から自車両の前方を見た図であって、経路案内画像Aを示す説明図である。
ここで、図1,5に示すように、プロジェクタ22からは、直進指示部A1、及び分岐指示部A2を有する矢印画像が投影される。この場合、画像生成部33は、まずナビゲーションシステム13から入力される情報に基づいて、プロジェクタ22で投影する経路案内画像Aの基本画像を図示しないメモリ部から選択する。その後、上述した自車両10の走行状態に基づいて、経路案内画像Aの長さや幅を変形する。
具体的に、図6,7に示すように、画像生成部33は、直進指示部A1の先端を分岐点に合わせた状態で、自車両10が分岐点に近づくに従い、直進指示部A1の長さを短くする一方、分岐指示部A2の長さを長く、かつ太くする。また、画像生成部33は、自車両10の走行速度が遅くなるに従い、直進指示部A1の幅を広くするように制御している。すなわち、直進指示部A1の幅は、分岐点に向けて減速するに従い広くなるようになっている。なお、画像生成部31は、自車両10が分岐点で分岐が完了するまで、自車両10の走行状態に基づいて経路案内画像Aを生成し続ける。
【0040】
図8は、図1に相当する図であって、経路案内画像を示す説明図である。
さらに、ステップS4において、投影角度算出部32は、自車両10の走行状態に基づいてプロジェクタ22の路面Lに対する投影角度を算出し続け、プロジェクタ22の投影位置を調整する。具体的に、投影角度算出部32は、図8に示すように、分岐点までの到達残距離が近く、または走行速度が遅くなるに従い、プロジェクタ22を下方に傾け、投影位置を自車両10に接近させる。
【0041】
以上により、ECU21による画像投影処理を終了する。なお、ナビゲーションシステム13に目的地を設定して走行している最中には、上述したフローを繰り返して行う。
【0042】
このように、本実施形態では、自車両10が分岐点に乗員が視認可能な程度まで近づいたとき、ナビゲーションシステム13で探索された経路情報に基づいて、自車両10を分岐方向へと誘導する経路案内画像Aを自車両10の前方の路面L上に投影する投影手段15を有する構成とした。
この構成によれば、路面Lに投影された経路案内画像Aを確認しながら走行することで、ナビゲーションシステム13のモニタを確認する等、視線を自車両10の進行方向から外すことなく、また、目の焦点を大きく変化させる必要なく、目的地までの経路を確認できる。
さらに、経路案内画像Aが路面Lに直接投影されるので、運転者から見て経路案内画像Aと実際の路面Lとのズレが少なく、経路案内画像Aを正確、かつ速やかに認識できる。
したがって、運転者の視線移動を抑制した上で、経路案内画像Aの視認性を向上させることができる。
また、経路案内画像Aが路面Lに直接投影されるので、自車両10の運転者だけでなく、自車両10の周囲の移動体(例えば、自車両10の前方に存在する歩行者等)も自車両10の進行方向を確認できることになる。そのため、周囲の移動体に対する注意喚起の機能も果たすことができる。
【0043】
また、直進指示部A1の先端を分岐点に合わせて投影することで、実際に分岐すべき分岐点を判断し易くなる。
さらに、自車両10の走行状態に応じて経路案内画像Aの長さや幅を変更することで、経路案内画像Aに遠近感(奥行き)を持たせることができる。したがって、経路案内画像Aの視認性をより一層向上できる。
【0044】
また、分岐点までの到達残距離が近くになるに従いプロジェクタ22の投影位置を近づけることで、プロジェクタ22の投影位置が遠い場合に比べてプロジェクタ22の出力に対する輝度を向上させ、視認性をより一層向上させることができる。
さらに、車外カメラ14が撮影した画像結果に基づいて投影位置を調整することで、周辺状況に関わらず経路案内画像Aを最適な位置に投影できる。また、自車両10とプロジェクタ22の投影位置との間に前方車両や障害物等が存在した場合には、プロジェクタ22による投影を禁止とすることで、経路案内画像Aが前方車両の乗員等に影響を及ぼすことがない。
【0045】
なお、本実施形態の車軸発電機17は、車軸の回転力に応じた電力を投影手段15(プロジェクタ22)へ供給可能となっており、走行速度の増加に伴い高電力を供給できるので、その電力を用いて走行速度の増加に伴い投影手段15(プロジェクタ22)の経路案内画像Aの輝度を高めてもよい。そうすることで、プロジェクタ22への輝度を高めるための電力を、バッテリ16を用いずに賄うことができる。
また、通常は投影方向を下方に向けた状態で配置されているプロジェクタ22において、車軸発電機17で発電された電力を用いてプロジェクタ22の路面Lに対する投影角度を上方に傾けるように制御してもよい。そうすることで、プロジェクタ22を上方へ向ける電力をバッテリ16を用いず賄うこともできる。
【0046】
なお、本発明の技術範囲は、上述した各実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲において、上述した実施形態に種々の変更を加えたものを含む。すなわち、上述した実施形態で挙げた構成等はほんの一例に過ぎず、適宜変更が可能である。
例えば、プロジェクタにより投影される経路案内画像Aは、単色に限らず、複数色の色で投影できるようにしても構わない。この場合、自車両10の周辺状況を検出する外界センサ等を設け、路面Lの状態や、時刻、天候等で変動する路面色や路面照度に応じて最も認識し易い色で経路案内画像を投影しても構わない。
【0047】
さらに、上述した実施形態では、ナビゲーションシステム13の経路情報に基づいて経路案内画像Aを投影する場合について説明したが、速度等を投影しても構わない。
また、上述した実施形態では、プロジェクタ22を車幅方向の中央部に搭載する構成について説明したが、これに限らず、車幅方向の運転席側に搭載しても構わない。
また、経路案内画像Aの投影が開始される所定距離は、予め設定されていても、乗員自身で自由に設定できるようにしても構わない。この場合、夜間等の前照灯の点灯時は、前照灯の消灯時に比べて投影開始のタイミングを早め(遠め)に設定しておくことが好ましい。これにより、前照灯の点灯時であっても、視認性を維持することができる。
【0048】
また、上述した実施形態では、交差点(分岐点)を右折する場合について説明したが、これに限らず、例えばT字路や五叉路等、各種の分岐点での経路案内に用いることができる。
【0049】
また、上述した実施形態では、経路案内画像Aに矢印画像を用いる場合について説明したが、運転者が分岐方向を認識できる画像であれば、矢印画像に限らない。
また、上述した実施形態では、プロジェクタ22の投影角度を変更することで、自車両10に対する投影位置を変更する場合について説明したが、これに限らず、プロジェクタ22の投影範囲内で経路案内画像Aを移動させても構わない。
【符号の説明】
【0050】
10…自車両 13…ナビゲーションシステム(経路探索手段) 15…投影手段 A…経路案内画像 A1…直進指示部 A2…分岐指示部
【特許請求の範囲】
【請求項1】
自車両の現在位置、及び前記現在位置から設定された目的地までの経路を探索する経路探索手段と、
前記自車両が前記経路上の分岐点に乗員が視認可能な程度まで近づいたとき、前記経路探索手段で探索された経路情報に基づいて、前記自車両を分岐方向へと誘導する経路案内画像を前記自車両の前方の路面上に投影する投影手段と、を備えていることを特徴とする車両用投影装置。
【請求項2】
前記経路案内画像は、前記自車両の直進方向に沿って延びる直進指示部と、前記直進指示部に対して曲折して分岐方向に沿って延びる分岐指示部と、を有する矢印画像であり、
前記投影手段は、前記直進指示部の先端を前記分岐点に合わせて投影することを特徴とする請求項1記載の車両用投影装置。
【請求項3】
前記投影手段は、前記現在位置から前記分岐点までの到達残距離が短くなるに従い、前記直進指示部の長さが短くなるように投影することを特徴とする請求項2記載の車両用投影装置。
【請求項4】
前記投影手段は、前記現在位置から前記分岐点までの到達残距離が短くなるに従い、前記分岐指示部の長さが長くなるように投影することを特徴とする請求項2または請求項3記載の車両用投影装置。
【請求項5】
前記投影手段は、前記現在位置から前記分岐点までの到達残距離が短くなるに従い、前記分岐指示部の幅が広くなるように投影することを特徴とする請求項2から請求項4の何れか1項に記載の車両用投影装置。
【請求項6】
前記投影手段は、前記自車両の走行速度が遅くなるに従い、前記直進指示部の幅が広くなるように投影することを特徴とする請求項2から請求項5の何れか1項に記載の車両用投影装置。
【請求項7】
前記投影手段は、前記路面に対する投影角度を変更可能に構成されていることを特徴とする請求項1から請求項6の何れか1項に記載の車両用投影装置。
【請求項8】
前記自車両の周辺を撮影する撮影手段を備え、
前記撮影手段が撮影した撮影結果に基づいて前記投影手段の投影範囲を調整することを特徴とする請求項1から請求項7の何れか1項に記載の車両用投影装置。
【請求項9】
前記投影手段は、前記撮影手段の前記撮影結果により前記自車両の前方における投影範囲内に障害物または前方車両が検出された場合に、投影を禁止することを特徴とする請求項8記載の車両用投影装置。
【請求項10】
前記自車両の前照灯の点灯時における前記投影手段の投影開始時期を、前記前照灯の消灯時に比べて早く設定することを特徴とする請求項1から請求項9の何れか1項に記載の車両用投影装置。
【請求項1】
自車両の現在位置、及び前記現在位置から設定された目的地までの経路を探索する経路探索手段と、
前記自車両が前記経路上の分岐点に乗員が視認可能な程度まで近づいたとき、前記経路探索手段で探索された経路情報に基づいて、前記自車両を分岐方向へと誘導する経路案内画像を前記自車両の前方の路面上に投影する投影手段と、を備えていることを特徴とする車両用投影装置。
【請求項2】
前記経路案内画像は、前記自車両の直進方向に沿って延びる直進指示部と、前記直進指示部に対して曲折して分岐方向に沿って延びる分岐指示部と、を有する矢印画像であり、
前記投影手段は、前記直進指示部の先端を前記分岐点に合わせて投影することを特徴とする請求項1記載の車両用投影装置。
【請求項3】
前記投影手段は、前記現在位置から前記分岐点までの到達残距離が短くなるに従い、前記直進指示部の長さが短くなるように投影することを特徴とする請求項2記載の車両用投影装置。
【請求項4】
前記投影手段は、前記現在位置から前記分岐点までの到達残距離が短くなるに従い、前記分岐指示部の長さが長くなるように投影することを特徴とする請求項2または請求項3記載の車両用投影装置。
【請求項5】
前記投影手段は、前記現在位置から前記分岐点までの到達残距離が短くなるに従い、前記分岐指示部の幅が広くなるように投影することを特徴とする請求項2から請求項4の何れか1項に記載の車両用投影装置。
【請求項6】
前記投影手段は、前記自車両の走行速度が遅くなるに従い、前記直進指示部の幅が広くなるように投影することを特徴とする請求項2から請求項5の何れか1項に記載の車両用投影装置。
【請求項7】
前記投影手段は、前記路面に対する投影角度を変更可能に構成されていることを特徴とする請求項1から請求項6の何れか1項に記載の車両用投影装置。
【請求項8】
前記自車両の周辺を撮影する撮影手段を備え、
前記撮影手段が撮影した撮影結果に基づいて前記投影手段の投影範囲を調整することを特徴とする請求項1から請求項7の何れか1項に記載の車両用投影装置。
【請求項9】
前記投影手段は、前記撮影手段の前記撮影結果により前記自車両の前方における投影範囲内に障害物または前方車両が検出された場合に、投影を禁止することを特徴とする請求項8記載の車両用投影装置。
【請求項10】
前記自車両の前照灯の点灯時における前記投影手段の投影開始時期を、前記前照灯の消灯時に比べて早く設定することを特徴とする請求項1から請求項9の何れか1項に記載の車両用投影装置。
【図1】


【図2】

【図3】
【図4】
【図5】

【図6】

【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−247369(P2012−247369A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2011−120961(P2011−120961)
【出願日】平成23年5月30日(2011.5.30)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成23年5月30日(2011.5.30)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]