
Fターム[4C097BB06]の内容
補綴 (46,288) | 技術の対象 (7,442) | 補綴;代替物の操作又は制御 (715) | 電気的な制御 (313)
Fターム[4C097BB06]に分類される特許
1 - 20 / 313
下肢動作支援装置
体液流を制御する方法および装置
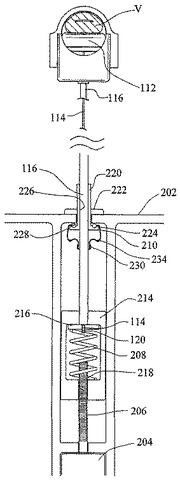
【課題】尿道などの宿主体の管または血管を通る体液流を制御する新規の埋込み可能な体液流制御装置によって、当業における上記欠点および不利な点を克服かつ軽減する。
【解決手段】宿主体内部の液流を制御する埋込み可能な装置および方法。閉位置にあるとき体管(V)内部の液流を減少させ、かつ開位置にあるとき液流を許容する締付け部材(112)が備わる。さらに、開位置と閉位置の間で、締付け部材(112)の移動を制御する制御機構が存在する。
(もっと読む)
アシストロボット制御装置

【課題】使用者のリハビリまたは力増幅の用途において、必要な部位に必要なだけアシストトルクを与える。
【解決手段】アシストロボット制御装置120は、状態検出値に基づいて推定器ゲインを推定する推定器ゲイン演算器121と、状態検出値と推定器ゲインに基づいて状態推定誤差を算出する状態推定誤差演算器122と、状態推定誤差に基づいて使用者トルク推定値を算出する使用者トルク推定器123と、使用者トルク推定値に基づいて動作補助またはリハビリ治療に必要なアシストトルクを算出し、関節モータがアシストトルクを発生するようなモータ電流を出力するアシストトルク演算器124と、を備える。
(もっと読む)
歩行支援装置及びその制御方法
【課題】使用者の歩容の異常を検出することができる歩行支援装置を提供する。
【解決手段】本発明の一形態に係る歩行支援装置1は、使用者の腿部に装着され、使用者の歩行を支援する歩行支援装置であって、使用者の歩行状態を検出する検出手段7と、検出手段7の検出結果に基づいて算出した、遊脚動作時間と遊脚完了予測時間とに基づいて、使用者の歩容が正常か否かを判定する歩容判定手段93と、を備える。このとき、遊脚動作時間と遊脚完了予測時間との差が0以下であると、制御手段92を制御して使用者の膝が伸展するように駆動手段6を動作させる。
(もっと読む)
電動義手
【課題】作動音を低減して静粛性を高めつつ、軽量化を図ることのできる電動義手を提供する。
【解決手段】義手本体10に支持された第1指部35及び第2指部42を回動させる駆動源として、高分子材料により形成され、電圧印加に応じて弾性変形し、電圧印加の停止に応じて元の形状に復元することにより直線往復運動する高分子アクチュエータ50を用いる。上記直線往復運動を回動運動に変換して各指部35,42に伝達する動力伝達部60を設ける。高分子アクチュエータ50から動力伝達部60を経て両指部35,42に至る動力伝達経路に、両指部35,42を含む複数のレバーを有するリンク機構70を設ける。これらのレバーの少なくとも1つを、支点、力点及び作用点を有するてことして機能させる。そして、力点を通じてレバーに入力される変位量を増幅して、作用点から出力させる。
(もっと読む)
腰部補助装置
【課題】利用者の左右の下肢の状態との関係を考慮して適切に腰部を補助する腰部補助装置を提供する。
【解決手段】腰部補助装置の右アクチュエータ40は、右角度検出部で検出された右屈曲角度に応じて右アクチュエータによる右起立力が制御され、左アクチュエータ42は、左角度検出部で検出された左屈曲角度に応じて左アクチュエータによる左起立力が制御されている。
(もっと読む)
歩行支援装置
【課題】安定的固定と装着感の両者を満足させることを目的とする。
【解決手段】締付力を変更する固定具アクチュエータを設けることにより、歩行支援装置の締付力を可変にする。そして、1歩行周期の間を動作の状態に応じて区分し、各歩行動作状態の区分毎に各装着部21〜23の締付強度を予め決めておく。そして、各センサ出力から、脚がどの区分の歩行動作状態にあるかを検出し、検出した区分対応する締付力で各装着部21〜23を締め付ける。
(もっと読む)
歩行支援装置
【課題】二重関節において歩行アシストに適するように変動過度特性を動的に調整する。
【解決手段】歯車54は、中央にザグリ部75を有する貫通孔76が形成されている。ザグリ部75の内周側には、伸縮する偏心アクチュエータ73a〜73dが十字状に設置されている。偏心アクチュエータ73b、73dは、固定軸55の両側に対向して配置されており、端部は、固定軸55の両側を挟持している。偏心アクチュエータ73a、73cは、偏心アクチュエータ73b、73dの軸線に対して垂直な方向において、固定軸55の両側に対向して配置されており、端部は、固定軸55の両側を挟持している。偏心アクチュエータ73a〜73dを駆動して歯車54の回転軸を中心点80から貫通孔76内の任意の点に偏心させる。
(もっと読む)
グラフト層をエレクトロスピニングする方法
【課題】内層と該内層ほど多孔質ではない外層を有するステントグラフトを作る方法を開示する。
【解決手段】マンドレル12に第1電荷26を帯電させ、第1針14に第2電荷28を帯電させ、前記マンドレルと前記第1針とを相対的に回転・移動し、第1溶剤と混合した第1ポリマーを第1流量で第1針を通して供給し、それによって、ファイバー32の第1層38が、前記マンドレル上でエレクトロスピニングされ、ステントを前記第1層に配置し、前記マンドレルに第3電荷を帯電させ、第2針に第4電荷を帯電させ、前記マンドレルと前記第2針とを相対的に回転・移動し、第2溶剤と混合した第2ポリマーを第2流量で第2針を通して供給し、それによって、ファイバーの第2層が、前記ステント上でエレクトロスピニングされることを含み、前記第2針は、前記第1針よりも大きなルーメンを有し、前記第2流量は、前記第1流量よりも大きくなるようにした。
(もっと読む)
装着式動作補助装置
【課題】装着者の負担を軽減して作業効率を高める装着式動作補助装置を提供する。
【解決手段】装着者12は、装着式動作補助装置10が装着された状態で防護服14及び頭部保護具16を装着する。動作補助装置10は、腰支持体30に当該装着者12の上体を囲むように形成された上体フレーム210が取り付けられている。上体フレーム210は、当該装着者12の右側に位置する第1上フレーム220と、当該装着者12の左側に位置する第2上フレーム230と、第1上フレーム220と第2上フレーム230との間を連結する連結部240とを有する。防護服14を着用する際は、第1上フレーム220及び第2上フレーム230の肩支持部222、232が防護服14の肩部内側に当接する。従って、防護服14の質量は、腰支持体30に固定された上体フレーム210に支持され、装着者12には作用しない。
(もっと読む)
電動義手
【課題】簡単な構成でより人間の手に近い動きが得られる安価な電動義手を提供する。
【解決手段】 人指し指に該当する第一義指4と、中指に該当する第二義指5と、薬指に該当する第三義指6と、小指に該当する第四義指7と、親指に該当する第五義指8と、各義指を支持する基台2と、この基台2を支持する腕部とからなる。そして、基台2に義指を動かす複数のモータを取り付け、このモータに対応してモータの回転方向と起動とを操作する複数のスイッチを設けた。
(もっと読む)
視覚再生補助装置
【課題】 体内装置の刺激部と、刺激部に繋がるケーブルを安定して眼球上に固定させることができる視覚再生補助装置を提供する。
【解決手段】
視覚再生補助装置は、患者の視覚を形成する視覚神経系を構成する細胞又は組織を電気刺激するための複数の電極を有し,患者の眼球に設置される刺激部と、刺激部と離れた位置に設置するために別筐体で構成されて刺激部の動作制御をする制御部と、刺激部と制御部を導線で電気的に接続すると共に刺激部を設置する眼球に沿って這わせることができる長さを有するケーブルと、眼球に沿って這わされたケーブルの位置を眼球に対して固定するための節部と、を備える。
(もっと読む)
脚装具
【課題】煩わしいスイッチ操作を要することなく立ち上がり支援を開始したり中断したりできる脚装具を提供する。
【解決手段】脚装具は、大腿リンク、下腿リンク、荷重センサ、及び、コントローラを備えている。大腿リンクと下腿リンクは夫々ユーザの大腿と下腿に装着される。下腿リンクは大腿リンクと回転可能に連結されている。下腿リンクは、アクチュエータによって回転する。荷重センサは、脚装具を装着した脚の足に加わる床反力を計測する。コントローラは、荷重センサの計測値が予め定められた荷重閾値よりも大きい場合は膝伸展方向に下腿リンクを回転させ、荷重センサの計測値が荷重閾値よりも小さい場合は膝屈曲方向に下腿リンクを回転させる。
(もっと読む)
眼内レンズ
【課題】硝子体内の圧力と同じないし近似する圧力をリアルタイムに測定することにより、緑内障の進行リスクを抑制する眼内レンズを提供する。
【解決手段】所定の屈折力を有する光学部と、水晶体嚢内にて前記光学部を支える支持部とを備える眼内レンズであって、前記支持部には、前記水晶体嚢における後嚢を介して硝子体内の圧力を測定するセンサ部が設けられ、前記光学部には、前記センサ部にて測定された前記圧力を外部に伝達するアンテナ部が設けられている。
(もっと読む)
アクチュエーター及びアクチュエーターの制御方法
【課題】小型化が可能な電極構造を有するアクチュエーターを提供する。
【解決手段】第1の電極及び第2の電極を有するアクチュエーター素子と、前記アクチュエーター素子に駆動電圧の供給を行う駆動回路と、前記第1の電極と前記第2の電極との間の電位差の検出を行う検出回路と、を含み、前記駆動電圧の供給は、所定の期間における第1の期間内に、前記第1の電極と前記第2の電極との間に電位差が生じるように行われ、前記電位差の検出は、前記所定の期間における前記第1の期間以外の第2の期間内に行われ、前記所定の期間の長さは、前記第1の期間の長さと前記第2の期間との長さとを加えた長さであることを特徴とする。
(もっと読む)
背筋力補助装置
【課題】モータが停止したときにワイヤが伸びてユーザの姿勢が崩れないように、ワイヤを保持するフェイルセーフ機構を備えた背筋力補助装置を提供する。
【解決手段】背筋力補助装置100は、ユーザの腰に装着される腰ハーネス20と、腰ハーネス20に取り付けられているワイヤ巻き上げ器30と、ユーザの背中に装着される背ハーネス10と、ワイヤ巻き上げ器30から伸びて背ハーネス10に固定されているワイヤWaを備える。ワイヤ巻き上げ器30は、ワイヤWaを巻き取るプーリ22と、プーリ22を駆動するモータ34と、プーリ22とモータ34の間で回転力を伝達するウォームギア37とを備えている。ウォームギア37は、逆駆動され難いので、モータ34が停止してもワイヤWaが伸びてユーザの姿勢が崩れることはない。
(もっと読む)
瞳孔の大きさを調整するデバイスおよび方法
【課題】薬を使用せず、非侵襲的に患者の瞳孔の大きさを変更するデバイスおよび方法を提供する。
【解決手段】患者の目の領域の外部に配置される電界発生源と、目が配置される位置に電界領域を形成すべく互いに配置されるように構成された第1および第2の電極により形成される電極装置を具え、所望の電界形状を有する所望の強さおよび方向の外部の電界を患者の虹彩に適用することにより、シナプスを刺激または抑制し、これにより、散瞳または縮瞳の効果を一時的に引き起こす構成とする。
(もっと読む)
歩行補助装置および歩行補助装置の制御方法
【課題】装着したユーザーの疲労を考慮した歩行アシストを実現する。
【解決手段】本発明に係る歩行補助装置は、ユーザーが歩行補助装置を装着してからの使用状況と、記憶手段に記憶する身体特徴量に基づいて疲労度を算出する疲労度算出処理と、疲労度算出処理にて算出された疲労度に基づいてアシスト量を決定するアシスト量決定処理と、アシスト量決定処理で決定されたアシスト量に基づいてアクチュエーターを駆動するアシスト処理と、を実行する制御部とを備えることを特徴とする。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】歩行アシストにおいて、より段差の高い階段をも上ることができるようにする。
【解決手段】通常階段を上る場合、太ももを持ち上げるとともに膝を曲げることで、膝から下の脛の部分を鉛直方向に垂らした状態で足を階段の上に乗せながら上っている(膝曲げ上り)。このため、足を最大上げた場合の高さh1が階段の段差Hよりも高く上がらないと階段を上ることができない。そこで股関節を限界角度θ1まで上げた状態でも足を階段の高さよりも高く上げられない場合には、膝を伸ばすことで足をより高く(h2)上げながら階段を上るようにする(膝伸ばし上り)。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】歩行アシストにおいて、より適切な省エネ制御を行う。
【解決手段】歩行アシスト装置1は、目的地までの全歩行経路を取得し、歩行距離を元に通常のアシストを行った場合に必要な電力量を求める。そして、バッテリ18の残量が目的地に到達するまでの歩行アシストに足りない場合、地面から離れている遊脚のアシスト力を低減してバッテリの消費を低減し、目的地までアシストを継続する。装着者Mの負担が小さいのは、坂道を下るときであり、また、遊脚と立脚では、遊脚のアシスト力を低減した場合の方が装着者Mの負担が小さいと考えられる。そこで、下り遊脚、平地遊脚、下り立脚、平地立脚の順にアシスト力の低減を行うことで、目的地までバッテリが足りるアシスト方法を選択し、実行する。
(もっと読む)
1 - 20 / 313
[ Back to top ]